一種自感應(yīng)共享車位鎖的設(shè)計(jì)與實(shí)現(xiàn)
2020-06-24 03:00:45趙迎嚴(yán)李強(qiáng)馮郅皓
物聯(lián)網(wǎng)技術(shù) 2020年6期
關(guān)鍵詞:單片機(jī)
趙迎 嚴(yán)李強(qiáng) 馮郅皓


摘 要:隨著汽車不斷普及到家家戶戶,車位愈發(fā)緊缺。在“共享”概念不斷延伸的今天,文章設(shè)計(jì)并實(shí)現(xiàn)了一種基于超聲波測距技術(shù)的智能自感應(yīng)車位地鎖,通過超聲波傳感器的應(yīng)用,實(shí)現(xiàn)了一種通過感應(yīng)汽車來去從而自動(dòng)控制車位鎖的升降。該設(shè)計(jì)不僅可以解決“停車難”的問題,還可以優(yōu)化車位鎖擺放位置,實(shí)現(xiàn)車位共享,給車位主創(chuàng)造經(jīng)濟(jì)效益,為未來停車智能化提供了一定的參考意義。
關(guān)鍵詞:自感應(yīng)車位鎖;超聲波傳感器;STM32F103單片機(jī);共享停車;車位鎖控制;車位管理
中圖分類號(hào):TP211+.5文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):2095-1302(2020)06-0-04
0 引 言
近年來隨著汽車數(shù)量的激增,車位的供不應(yīng)求導(dǎo)致了越來越多的問題,停車問題已經(jīng)成為了人們關(guān)注的焦點(diǎn)。尤其是車位難找以及車輛的亂停亂放給車位主帶來了很大煩惱。車位的數(shù)量愈發(fā)緊張,那么對車位的有效管理以及智能化就尤為重要[1]。
為了防止出現(xiàn)爭搶車位的情況,保障車位主的權(quán)益,車位鎖隨之出現(xiàn)在人們的視線。根據(jù)在“淘寶網(wǎng)”對“車位鎖”關(guān)鍵詞進(jìn)行搜索,取樣100個(gè)商品項(xiàng),發(fā)現(xiàn)市面上主要有兩類車位鎖,根據(jù)功能可將其分為手動(dòng)車位鎖和遙控車位鎖。其中機(jī)械手動(dòng)車位鎖占68款,智能遙控車位鎖占32款。由于手動(dòng)機(jī)械車位鎖價(jià)格低廉,在100個(gè)樣品中,銷量最高的是手動(dòng)控制車位鎖。但是,車主安裝手動(dòng)式車位鎖后,就必須在汽車出入時(shí)親自下車操作解鎖落鎖,浪費(fèi)車主的時(shí)間和精力,尤其是遇到雨雪天氣,很不方便。隨著車位鎖逐漸智能化,市面上的某些短程智能操控車位鎖銷量可觀,如基于藍(lán)牙技術(shù)的遙控車位鎖和紅外車位鎖等,但是這些車位鎖仍然有種種不足之處。
本文基于超聲波測距技術(shù),設(shè)計(jì)了一款短程自動(dòng)感應(yīng)的車位鎖,結(jié)合車位鎖的擺放位置,實(shí)現(xiàn)車位共享。相對于價(jià)格高昂的智能遙控車位鎖,本文采用的超聲波傳感器大大降低了生產(chǎn)成本,彌補(bǔ)了其他車位鎖的不足之處,免去了人工操作的過程。既能有效減少因“搶車位”引發(fā)的矛盾沖突,又更加方便了車主停車,解決“停車難”的問題。在滿足車主自身車位上鎖的需求的同時(shí),又能為車位創(chuàng)造經(jīng)濟(jì)價(jià)值,使閑置的車位高效利用,實(shí)現(xiàn)車位的共享,解決“停車難”的問題。
1 自感應(yīng)車位鎖設(shè)計(jì)
為了實(shí)現(xiàn)車位鎖的自感應(yīng)功能,本文選用超聲波傳感器作為車輛在位傳感器,超聲波傳感器HC-SR04價(jià)格低廉,操作簡單。車位鎖終端其余部件包括STM32單片機(jī)、超聲波測距模塊、光電傳感器、L298N電機(jī)驅(qū)動(dòng)、直流步進(jìn)電機(jī)等硬件模塊。
為了實(shí)現(xiàn)車位鎖的共享功能,把車位鎖放置在車位的前端位置,當(dāng)使用車位鎖時(shí),將車位鎖放置于車位入口處,如圖1所示。工作流程如下:用戶想要停車時(shí),通過掃描二維碼知會(huì)車位主,車位主發(fā)送開鎖指令,當(dāng)車位鎖接收到車位主發(fā)出的指令時(shí),車位鎖打開,用戶順利停入車位后,隨即車位鎖升起,鎖住車位。待用戶使用完畢車位并按停車時(shí)間付費(fèi)后,車位主發(fā)出指令開鎖,車位鎖降下,用戶離開。時(shí)間達(dá)到預(yù)設(shè)值后,車位鎖升起,等待下一輛來車。
1.1 硬件設(shè)計(jì)
自感應(yīng)車位鎖的核心是STM32單片機(jī),選擇STM32單片機(jī)為核心控制模塊,STM32F103主要分為基礎(chǔ)型與增強(qiáng)型。本文使用的STM32F103ZET6屬于增強(qiáng)型,模擬/數(shù)字(A/D)轉(zhuǎn)換、數(shù)字/模擬(D/A)轉(zhuǎn)換是該系列處理的重要功能[2]。
單片機(jī)通過發(fā)送指令給L298N驅(qū)動(dòng)模塊來控制車位鎖鎖臂升降電機(jī)的轉(zhuǎn)動(dòng)。光電傳感器用來感應(yīng)鎖臂升降的位置。
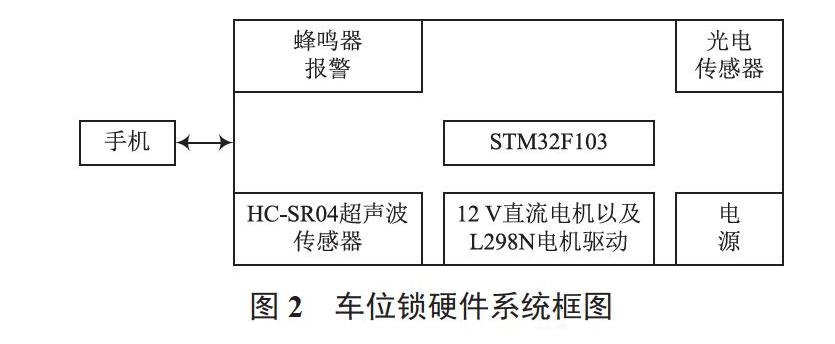
其余部分由光電感應(yīng)、步進(jìn)電機(jī)、電機(jī)驅(qū)動(dòng)、電源控制、超聲波傳感器、報(bào)警模塊和時(shí)鐘電路等組成。采用超聲波測距傳感器檢測車輛是否有車輛靠近和車輛是否在位,檢測算法采用間隔脈沖多次采樣的方式,確保檢測準(zhǔn)確的同時(shí),降低檢測器的功耗[3]。報(bào)警模塊利用蜂鳴器報(bào)警,負(fù)責(zé)強(qiáng)制開鎖報(bào)警、錯(cuò)誤操作報(bào)警和電量過低報(bào)警,防止人為或意外對車位鎖造成損害。時(shí)鐘模塊負(fù)責(zé)計(jì)時(shí)。圖2為自感應(yīng)車位鎖硬件系統(tǒng)框圖。
整體工作過程如下:車位鎖上電后,給在位傳感器和光電傳感器供電,首先掃描檢測車位上方判斷是否有車輛占用車位,檢測結(jié)果發(fā)送給單片機(jī),單片機(jī)根據(jù)是否有車的信號(hào)繼續(xù)發(fā)出指令。
若車位有車則開始計(jì)時(shí)至車輛離開;若車位無車,則發(fā)送信號(hào)判斷是否有車輛靠近車位。若無車輛靠近,車位鎖鎖臂保持升起狀態(tài);若檢測到有車靠近,則降下車位鎖鎖臂,同時(shí)掃描光電傳感器信號(hào),判斷鎖臂位置,當(dāng)下降到指定位置后,調(diào)用計(jì)時(shí)子程序開始計(jì)時(shí),計(jì)時(shí)至預(yù)設(shè)時(shí)間值后,此時(shí)車輛應(yīng)停入車位。在位傳感器將檢測信號(hào)發(fā)送至單片機(jī),車輛停入車位后,單片機(jī)接收到上升信號(hào),調(diào)用上升子程序,控制電機(jī)旋轉(zhuǎn)上升,升起鎖臂,光電傳感器檢測鎖臂位置,到達(dá)指定位置時(shí),停止上升。隨后計(jì)時(shí)至車輛離開。
1.1.1 選擇超聲波傳感器測距
在自感應(yīng)車位鎖的感應(yīng)測距設(shè)計(jì)中,以STM32單片機(jī)為控制核心,協(xié)調(diào)各電路的工作。由于超聲波對色彩、光照以及電磁場等外界因素不敏感,因此適應(yīng)環(huán)境惡劣的場所,適應(yīng)范圍廣泛;超聲波傳感器的結(jié)構(gòu)設(shè)計(jì)簡單,體積小,費(fèi)用低,信息處理簡單可靠,易于小型化與集成化[4]。本文選擇超聲波傳感器作為測距工具,以檢測車輛是否靠近車位鎖和進(jìn)行車輛在位檢測。
車位鎖處于開機(jī)狀態(tài)時(shí),超聲波傳感器每隔10 s進(jìn)行一次距離檢測。
當(dāng)檢測到車輛不在位時(shí),兩組超聲波回路并行執(zhí)行,STM32單片機(jī)在兩組回路的I/O口同時(shí)發(fā)送40 kHz的脈沖,并選中每組CD4052的同一通道,向外發(fā)送超聲波,此時(shí)開始計(jì)時(shí)。遇到有車輛靠近時(shí)則發(fā)射反射波,進(jìn)入接收電路,進(jìn)行簡單的處理后,經(jīng)各自的CD4052通道進(jìn)入放大濾波電路后進(jìn)入STM32的ADC通道,從而計(jì)算得出車輛至車位的距離,保存測得距離的傳感器所在的通路得到車輛的方位,經(jīng)MAX3485以RS 485通信協(xié)議上傳給中控板車輛的距離與方位的信息[5]。接收到反射波后停止計(jì)時(shí)。根據(jù)計(jì)時(shí)器記錄時(shí)間C和超聲波聲速計(jì)算障礙物距離(s=ct/2,c為超聲波聲速)時(shí)會(huì)受溫度影響稍有變化,有些超聲波測距設(shè)備會(huì)進(jìn)行溫度補(bǔ)償設(shè)計(jì)[5]。
超聲波測距根據(jù)回波時(shí)間差值和已知的聲速計(jì)算,從而測得探頭與目的被測物體之間的距離。計(jì)算公式如下:
H=(?T/2)·C'? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
式中:H為目的距離;C'=340 m/s,為聲音在空氣中的傳播速度;T為超聲波探頭發(fā)出超聲波至接收到回波信號(hào)所經(jīng)歷的時(shí)間。
設(shè)超聲波發(fā)射探頭到地面的距離為H,當(dāng)有車輛駛?cè)霑r(shí),這時(shí)候測得超聲波發(fā)射探頭到障礙物的距離為H,把H設(shè)定為一個(gè)閾值,當(dāng)H發(fā)生一定程度的變化時(shí),方可判斷停車位上有車停入[6]。
1.1.2 光電傳感器電路的設(shè)計(jì)
光電傳感器是用來感應(yīng)車位鎖的鎖臂位置的傳感器。當(dāng)鎖臂上升至指定位置時(shí),光電傳感器根據(jù)感應(yīng)到的光的變化判斷車位鎖鎖臂的位置并將該信號(hào)發(fā)出,隨即單片機(jī)發(fā)出指令,電機(jī)停止轉(zhuǎn)動(dòng)。當(dāng)鎖臂下降至指定位置時(shí),光電傳感器向單片機(jī)發(fā)送信號(hào),單片機(jī)控制停止電機(jī)運(yùn)轉(zhuǎn),鎖臂停止下降。其原理是感應(yīng)光信號(hào)的強(qiáng)度變化從而將其轉(zhuǎn)換成電信號(hào)的強(qiáng)度變化。車位鎖在待機(jī)狀態(tài)下,唯有光電傳感器接收電路正常工作。這時(shí)不但要求電路具有超低功耗又要能保證其穩(wěn)定性和靈敏度,從而將車位鎖臂的升降信號(hào)發(fā)出[7]。
1.1.3 電機(jī)控制電路
電機(jī)控制電路是由單片機(jī)控制鎖臂電機(jī)進(jìn)行正轉(zhuǎn)與反轉(zhuǎn),利用L298N模塊作為電機(jī)驅(qū)動(dòng)。當(dāng)接收到升降鎖臂信號(hào)時(shí),單片機(jī)通過L298N驅(qū)動(dòng)模塊控制驅(qū)動(dòng)電機(jī)的正反轉(zhuǎn),從而使鎖臂升降。
1.1.4 聲光報(bào)警電路設(shè)計(jì)
聲光報(bào)警模塊主要功能是提示報(bào)警,具有檢測是否存在外力強(qiáng)制掰動(dòng)車位地鎖進(jìn)行停車的情形而進(jìn)行報(bào)警、錯(cuò)誤操作報(bào)警和電量過低報(bào)警的功能,防止人為或意外對車位鎖造成損害,以及不正當(dāng)停車現(xiàn)象的發(fā)生,降低損失。車位鎖在沒有收到單片機(jī)發(fā)出的動(dòng)作信號(hào)時(shí),單片機(jī)實(shí)時(shí)檢測位置信號(hào),如果發(fā)現(xiàn)位置發(fā)生連續(xù)改變,則開始進(jìn)行高響度蜂鳴器報(bào)警提示車位主[8]。
其工作原理為:車位鎖設(shè)備感應(yīng)到外力撞擊或是電量不足等故障時(shí),電容放電,高音喇叭收到信號(hào)后報(bào)警,二極管發(fā)光變紅以提示使用者,采用無源蜂鳴器報(bào)警。
1.2 軟件設(shè)計(jì)
車位鎖的程序設(shè)計(jì)如下:根據(jù)主程序要求對各控制升降、超聲波感應(yīng)的子程序各自編碼,再依靠主程序?qū)⒏鱾€(gè)模塊連接,調(diào)試主程序,完成整個(gè)程序的編寫。車位鎖業(yè)務(wù)流程圖如圖3所示,單片機(jī)上電后,檢測車位有無來車,判斷用戶是否順利停進(jìn)車位,順利停入車位后進(jìn)行計(jì)時(shí)計(jì)費(fèi),從而完成車位共享的過程。
1.2.1 鎖臂升降流程
在單片機(jī)掃描子程序時(shí),進(jìn)行上升檢測,傳輸信號(hào)為上升時(shí),電機(jī)旋轉(zhuǎn)上升;傳輸信號(hào)為下降時(shí),電機(jī)停止轉(zhuǎn)動(dòng)。程序流程圖如圖4所示。
1.2.2 計(jì)時(shí)子程序流程
為防止車位空閑時(shí)被人惡意占用,設(shè)定計(jì)時(shí)子程序以定時(shí)關(guān)閉車位鎖。程序啟動(dòng)后,以運(yùn)行5 min為節(jié)點(diǎn),當(dāng)起降桿降落5 min無操作后,起降桿自動(dòng)升起,關(guān)閉車位。
2 自感應(yīng)車位鎖的實(shí)現(xiàn)
2.1 軟件實(shí)現(xiàn)
將程序?qū)懭雴纹瑱C(jī)后,鎖臂的升起以及下降的子程序能互相調(diào)用。通過APP發(fā)出指令,單片機(jī)接收上升或下降信號(hào),從而控制鎖臂的升起和下降。在鎖臂上升過程中,若接收到下降的信號(hào),則停止上升。在鎖臂下降過程中,若接收到上升信號(hào),則停止下降。車位主和用戶均可通過APP發(fā)送指令,手機(jī)端APP界面(單機(jī)版)如圖5所示。
2.2 硬件實(shí)現(xiàn)
將程序代碼燒錄入STM32單片機(jī)后,進(jìn)行實(shí)物連接,圖6為組裝完成的自感應(yīng)車位鎖樣機(jī)。
固定端硬件連接如圖7所示,將硬件逐一按步驟連接,步進(jìn)電機(jī)由STM32核心板上的三個(gè)端口PA0,PF0,PF1控制;PA0與L298N電機(jī)驅(qū)動(dòng)模塊上的IN3相連,GND與L298N電機(jī)驅(qū)動(dòng)模塊上的IN4相連,L298N電機(jī)驅(qū)動(dòng)模塊上的OUT3,OUT4與步進(jìn)電機(jī)相連接,用以控制電機(jī)的正反轉(zhuǎn)。
超聲波模塊HC-SR04具有VCC,GND,TRIG,Echo四個(gè)端口。TRIG接PF1,Echo接PA0,VCC接5 V端口,GND接GND。
2.3 實(shí)物檢測
2.3.1 電壓測試
根據(jù)12 V直流電機(jī)、超聲波傳感器等模塊供電需求,綜合考慮采用1.5 V 一號(hào)鉛酸電池8節(jié)組成供電源,共計(jì)12 V,滿電電壓在13 V左右。如果檢測到電量低于10 V,在一段時(shí)間后不能維持車位鎖繼續(xù)工作的情況下,則報(bào)警示意提示該處車位鎖需要更換電池。
2.3.2 測距實(shí)驗(yàn)
超聲波傳感器水平測距實(shí)驗(yàn)的數(shù)據(jù)如表1所示,表格中的實(shí)際距離是通過卷尺測量的從超聲波探頭到墻壁之間的距離,測量距離就是用超聲波測距量的距離。從這幾組數(shù)據(jù)可以看出來最大相對誤差為1.50%,應(yīng)用于車位鎖時(shí)滿足水平方向障礙物檢測要求。
3 結(jié) 語
車位共享是共享經(jīng)濟(jì)熱潮的持續(xù)發(fā)展,是進(jìn)入現(xiàn)代化社會(huì)的新契機(jī)[9]。將私家車位的閑置時(shí)段進(jìn)行對外出租,這種共享模式為解決停車難的問題提供了一種新思路[10]。本文設(shè)計(jì)的基于超聲波測距技術(shù)的自感應(yīng)共享車位鎖與特殊的車位鎖擺放位置相結(jié)合,可實(shí)現(xiàn)全方位提供智能化停車服務(wù)和車位閑置時(shí)的共享功能,與市面上已經(jīng)出現(xiàn)的車位鎖比較,更加方便快捷;同時(shí)有效地解決了社會(huì)上停車難的問題和實(shí)現(xiàn)了閑置資源的高效利用,也保證了私家車位的個(gè)人所有性質(zhì),給車主帶來優(yōu)良的停車體驗(yàn),對未來的智能化停車形式奠定了物質(zhì)基礎(chǔ)。
注:本文通訊作者為嚴(yán)李強(qiáng)。
參考文獻(xiàn)
[1]譚科華,蔣津.一種智能專用車位鎖的設(shè)計(jì)[J].科技創(chuàng)新與應(yīng)用,2018(23):89-90.
[2]陳甸甸,王怡,金小萍.基于STM32的DAC信號(hào)輸出實(shí)驗(yàn)設(shè)計(jì)
[J].實(shí)驗(yàn)技術(shù)與管理,2019,36(1):72-75.
[3]王大清,殷學(xué)麗.基于單片機(jī)技術(shù)的超聲測距系統(tǒng)設(shè)計(jì)[J].中國新技術(shù)新產(chǎn)品,2017(21):31-32.
[4]羅忠輝,黃世慶.提高超聲測距精度的方法[J].機(jī)械設(shè)計(jì)與制造,2005(1):109.
[5]楊志江,鄭昆,耿春明,等.基于RS 485總線的多路超聲波傳感器測距系統(tǒng)設(shè)計(jì)[J].傳感器與微系統(tǒng),2018(12):79-82.
[6]劉維波.基于ZigBee無線傳感網(wǎng)絡(luò)的超聲波車位檢測系統(tǒng)[D].西安:長安大學(xué),2011.
[7]婁家星.基于單片機(jī)的超低功耗智能低功耗遙控車位鎖的設(shè)計(jì)與實(shí)現(xiàn)[D].濟(jì)南:山東大學(xué),2012.
[8]梅盼,陳躍,姜雪兒.基于GPRS智能停車鎖設(shè)計(jì)[J].電子設(shè)計(jì)工程,2019,27(4):66-69.
[9]李想,黃兆飛,冉亮,等.共享車位市場現(xiàn)狀分析及發(fā)展策略研究[J].成都工業(yè)學(xué)院學(xué)報(bào),2018,21(1):89-92.
[10]周小麗.私家車位共享意愿與選擇意向的實(shí)證研究[D].南京:南京大學(xué),2018.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
