老年男性2型糖尿病患者骨質(zhì)疏松調(diào)查及與體質(zhì)量指數(shù)、糖化血紅蛋白、病程和腎功能關系研究
2020-03-25 10:25:36賈椏鈞
中國骨質(zhì)疏松雜志 2020年1期
賈椏鈞
四川省廣元市第三人民醫(yī)院上西分院,四川 廣元 628000
2型糖尿病(type 2 diabetes mellitus,T2DM)是一種由胰島素分泌減少及(或)其敏感性降低造成的以血糖升高為基本特征的全身慢性代謝性疾病,常伴有脂肪、蛋白質(zhì)、水、電解質(zhì)等的代謝障礙,并可導致眼、腎、神經(jīng)、心血管等組織的慢性進行性病變[1-2]。骨質(zhì)疏松癥是一種老年人常見病,也是T2DM的常見并發(fā)癥,隨著T2DM人群的逐年增加,其發(fā)病率也相應升高,骨折風險大大提高,并成為長期嚴重疼痛和功能障礙的主要原因[3]。因此,及早發(fā)現(xiàn)骨質(zhì)疏松并予以積極治療對于T2DM患者意義重大。鑒于此,本研究將探討老年男性T2DM患者骨質(zhì)疏松的發(fā)生情況及與體重指數(shù)(body mass index,BMI)、糖化血紅蛋白(hemoglobin A1c,HbA1c)、病程和腎功能的相關關系,為其防治提供指導,以期達到早期預防、早期治療、減少相關醫(yī)療投入、改善患者預后的目的。
1 資料和方法
1.1 一般資料
選取我院2016年3月至2018年5月收治的443例老年男性T2DM患者作為研究對象。納入標準:根據(jù)臨床癥狀(多飲煩渴、尿量增多、難以解釋的體重減輕等)、血糖水平檢測[HbAlc高于7.0%或空腹血糖(fasting blood-glucose,F(xiàn)PG)不低于7.0 mmol/L和(或)餐后2 h血糖(2 hours postprandial glucose,2hPG)不低于10.0 mmol/L)]等確診的男性T2DM患者;排除標準:①患有1型糖尿病(T1DM)及其他特殊型糖尿病、糖尿病相關的疾病并發(fā)癥;②合并肝腎功能異常、內(nèi)分泌疾病、風濕病、自身免疫性疾病等影響鈣、磷代謝及骨代謝的疾病;③近期使用類固醇激素、維生素D、鈣制劑等干擾骨代謝的藥物;④長期臥床等;⑤近半年內(nèi)有手術及外傷史。選取同期老年男性健康體檢者443名,經(jīng)檢查排除糖尿病且無糖尿病家族史、無影響骨代謝的疾病及藥物服用史等。兩組所有受試者年齡≥60歲,均簽署知情同意書。
1.2 方法
1.2.1骨密度測定:采用深圳市艾克瑞電氣有限公司生產(chǎn)的AKDX型雙能X線吸收測定儀分別測定受試者腰椎(L1~4)、股骨頸、Ward’s三角、大轉(zhuǎn)子及全部股骨處的BMD。根據(jù)WHO的診斷標準,任一部位BMD較同性別、同種族健康成人骨峰值降低2.5個標準差(standard deviation,SD),即T值≤-2.5可診斷為骨質(zhì)疏松。
1.2.2相關指標測定:①基本情況:記錄患者的姓名、年齡、病程、服藥史、既往病史、家族史、吸煙史等;②BMI:研究對象脫去鞋子、外衣、免冠,測量身高、體重,分別以米(m)、千克(kg)作為單位進行計算,BMI=體重(kg)/身高(m)2;③HbA1c:觀察對象禁食8 h以上,于次日清晨抽取外周靜脈血,離心、分離血清,采用高壓液相層析法測定HbA1c水平;④腎功能指標:空腹采集靜脈非抗凝血,離心、分離血請,采用免疫比濁法檢測血清胱抑素C(cystatin C,Cys C),采用酶法測定血清尿素氮(blood urea nitrogen,BUN)、血清肌酐(serum creatinine,SCr);另取對象晨起潔凈中段尿,采用免疫比濁法檢測尿微量白蛋白(urine microalbumin,U-mAlb)。
1.3 統(tǒng)計學方法

2 結(jié)果
2.1 所有受試者基線資料情況
443例老年男性T2DM患者為T2DM組,選擇同期老年男性健康體檢者443名為健康體檢組,兩組年齡、體重、合并癥比較差異無統(tǒng)計學意義(表1)。
2.2 老年男性T2DM患者骨質(zhì)疏松發(fā)生情況
443例老年男性T2DM患者中并發(fā)骨質(zhì)疏松者182例(骨質(zhì)疏松組),發(fā)生率為41.08%,未合并骨質(zhì)疏松者261例(非骨質(zhì)疏松組),發(fā)生率為58.92%。老年男性健康體檢者檢出骨質(zhì)疏松57例,發(fā)生率為12.87%,兩者比較,差異顯著(χ2=89.526,P<0.05)。
表1 T2DM患者與健康體檢者基線資料比較Table 1 Comparison of baseline data between T2DM patients and healthy subjects in this
2.3 受試者各相關指標比較
骨質(zhì)疏松組年齡、病程、HbA1c、Cys C、BUN、SCr、U-mAlb較非骨質(zhì)疏松組差異顯著(P<0.05),BMI明顯低于非骨質(zhì)疏松組(P<0.05)。非骨質(zhì)疏松組中60~69歲人群比例顯著高于骨質(zhì)疏松組(χ2=25.005,P<0.05)。見表2。

表2 受試者各相關指標比較Table 2 Comparison of relative indexes of subjects
注:①年齡以10年為一間隔,由于≥90歲以上病例數(shù)較少,本研究將其與80~歲組合并為一組。
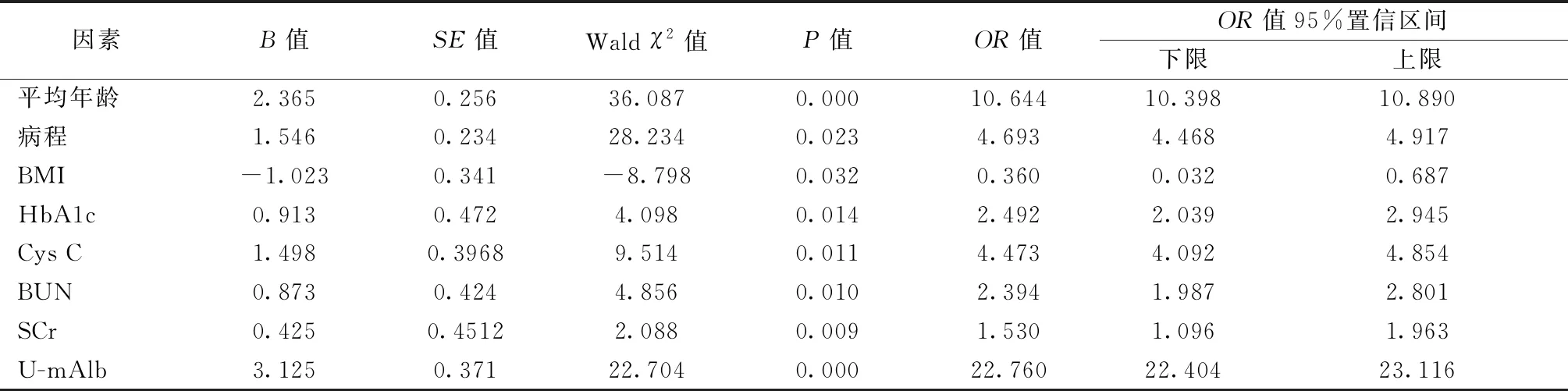
表3 Logistic多元回歸分析Table 3 Logistic multiple regression analysis
2.3 Logistic多元回歸分析
Logistic多元回歸分析顯示,老年男性T2DM患者發(fā)生骨質(zhì)疏松與年齡、病程、HbA1c、Cys C、BUN、Cr、U-mAlb呈顯著正相關關系(P<0.05),而與BMI呈顯著負相關關系(P<0.05)。見表3。
3 討論
骨質(zhì)疏松是因骨的礦物質(zhì)和基質(zhì)形成比例減少,導致骨量低下、骨微結(jié)構損傷、骨小梁稀疏、骨皮質(zhì)變薄、脆性增加、甚至無明顯誘因或輕微創(chuàng)傷即可導致骨折的代謝性疾病[4]。此病發(fā)病隱匿,初期癥狀不明顯,隨著病情進展,可引起身材變矮、嚴重腰背部疼痛、畸形、殘疾,甚至死亡[5]。骨質(zhì)疏松過去常被誤認為是婦女的疾病,原因在于男性的骨峰值較女性高,增齡性的骨量丟失速度和程度又不及女性,不易發(fā)生骨質(zhì)疏松[6]。隨著全球人口老齡化,老年男性骨質(zhì)疏松的發(fā)病率不斷上升,因其臨床表現(xiàn)嚴重、死亡率高,已逐漸成為影響男性健康的社會問題,其研究亦受到重視。
近年來,糖尿病的發(fā)病率在全球范圍內(nèi)呈逐年上升趨勢,已成為僅次于心血管疾病和腫瘤的第3大非傳染性疾病[7]。作為常見代謝相關疾病,糖尿病引起血糖升高的同時,還可引發(fā)諸多慢性并發(fā)癥,骨質(zhì)疏松是其在骨骼系統(tǒng)出現(xiàn)的嚴重并發(fā)癥,也是導致機體長期疼痛、關節(jié)功能障礙、致殘風險升高的主要原因[8]。目前,T1DM合并骨質(zhì)疏松的研究得到了肯定,普遍認為胰島素的絕對缺乏可加速骨吸收過程、干擾骨基質(zhì)形成和礦化,同時T1DM多于兒童或青少年時期起病,骨礦化不夠,骨密度難以達到骨峰值,增加骨質(zhì)疏松發(fā)生最終導致骨量下降和骨形態(tài)計量學特性改變。而T2DM由于發(fā)病機制不同,對骨代謝的影響也不同,受多種因素影響,尚無統(tǒng)一結(jié)論[9]。
本研究對443例老年男性T2DM患者的BMD、BMI、HbA1c、病程及腎功能情況進行了調(diào)查分析,結(jié)果發(fā)現(xiàn),443例老年男性T2DM患者中并發(fā)骨質(zhì)疏松者182例,發(fā)生率為41.08%,明顯高于健康體檢者的12.87%(P<0.05),提示老年男性T2DM患者骨質(zhì)疏松發(fā)生率明顯升高。同時發(fā)現(xiàn),骨質(zhì)疏松組年齡、病程、HbA1c、腎功能損傷指標(Cys C、BUN、SCr、U-mAlb)均顯著高于非骨質(zhì)疏松組(P<0.05),BMI明顯低于非骨質(zhì)疏松組(P<0.05)。本研究還進一步采用Logistic多元回歸分析探討老年男性T2DM患者發(fā)生骨質(zhì)疏松與以上指標的相關性,結(jié)果表明,年齡、病程、HbA1c及血清Cys C、BUN、Cr、U-mAlb等指標水平與老年男性T2DM發(fā)生骨質(zhì)疏松呈顯著正相關關系(P<0.05),BMI呈顯著負相關關系(P<0.05)。由此可見,高齡、長病程、低BMI、血糖控制不佳及腎功能損傷與老年男性T2DM患者發(fā)生骨質(zhì)疏松密切相關,究其原因:①隨著年齡的增長,成骨細胞活性逐漸下降,破骨細胞活性升高,造成骨形成小于骨吸收,表現(xiàn)為凈骨量丟失,且年齡越大,骨丟失越明顯,發(fā)生骨質(zhì)疏松的風險越高;②BMI是反映肥胖程度的確切指標,高BMI可增加組織的機械負荷,刺激骨形成,減少骨吸收[10];此外,胰島素樣生長因子-1、瘦素等與肥胖有關的因子均有促進骨形成的作用;而男性T2DM患者超重者較多,且存在胰島素抵抗(insulin resistance,IR),在為控制血糖、改善IR而進行飲食控制、減輕體重的治療過程中,隨著體重下降,骨量丟失也隨之增加;③隨著病程的延長,胰島分泌功能逐步衰退,而胰島素缺乏可導致骨轉(zhuǎn)換下降,引發(fā)骨質(zhì)疏松;④高HbA1c所致的滲透性利尿,可加速鈣、磷、鎂等礦物質(zhì)的丟失,進而影響骨代謝;⑤腎臟是機體鈣、磷轉(zhuǎn)運的主要器官,對維持鈣、磷正常水平有重要作用[11],當腎功能損傷時腎小管重吸收鈣、磷下降,尿鈣、磷增多,同時腎功能損傷使1-α羥化酶活動下降,導致鈣吸收發(fā)生障礙,骨質(zhì)礦化和骨形成受到影響,導致骨密度下降、骨質(zhì)疏松的發(fā)生。
綜上所述,老年男性T2DM患者骨質(zhì)疏松發(fā)生率明顯升高;高齡、長病程、低BMI、血糖控制不佳及腎功能損傷者更易罹患骨質(zhì)疏松。但本研究樣本量較少,研究結(jié)果可能存在偏倚,今后需擴大樣本量,并就預防措施、治療藥物的選擇及治療效果做進一步研究,以合理防治老年男性T2DM人群發(fā)生骨質(zhì)疏松,規(guī)避骨折風險,提高生活質(zhì)量。
猜你喜歡
中老年保健(2022年5期)2022-08-24 02:35:42
中老年保健(2022年1期)2022-08-17 06:14:56
保健醫(yī)苑(2022年6期)2022-07-08 01:26:34
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年5期)2021-08-24 07:07:20
中老年保健(2021年9期)2021-08-24 03:51:04
中老年保健(2021年7期)2021-08-22 07:42:16
中老年保健(2021年11期)2021-08-22 03:15:16
家庭醫(yī)學(下半月)(2020年1期)2020-05-11 02:05:44
媽媽寶寶(2017年3期)2017-02-21 01:22:30