一種振動式水果采摘機械臂設計
2020-06-28 14:20:14王順溈劉華雷徐添翼金一峰李乾寅常熟理工學院江蘇常熟215500
科學技術創新 2020年16期
王順溈 劉華雷 徐添翼 金一峰 李乾寅 張 凱(常熟理工學院,江蘇 常熟215500)
1 概述
我國是水果生產大國,水果是很多地區農村經濟發展的支柱性產業。但是我國水果采摘機械化水平還處于起步階段。據統計,在水果生產作業中,收獲采摘需投入的勞動力占整種植過程的50%~70%[1]。現如今市場上充斥著多種多樣的水果采摘裝置,國內市場上大多水果采摘裝置都是小型純機械結構,在采摘收集水果時還是需要大量勞動力,效率極低。
在國外果園大都在平原地區,因此以大型機械化生產為主。機械振動采摘機又可分為:機械推搖和機械撞擊兩種[2]。推搖式采摘器是通過振動器使果樹發生振動,從而使水果與果蒂發生分離。撞擊式是通過撞擊果樹使果實掉落。采用機械化采收不僅能減輕人們的勞動強度、節省人工成本、提高作業效率,而且能提高水果的經濟效益[3]。歐美等國外發達國家農業以大農場為主,采用振動式采摘機械較多。振動式采摘機械,現有結構原理所存在的缺點和不足之處:(1)需要人工操作機械臂,握住手把進而夾持樹干;(2)水果墜落后,或者直接墜落到地上,或者用大布料接,操作不是很方便;(3)機械手長時間振動后,容易出現滑落現象。國內的水果采摘結構主要是刀片輔助人工采摘裝置,升降采摘臺裝置等,與大型機械式采摘器相比,采摘效率較低。隨著我國逐漸進入老齡化社會,勞動力成本的提高,并且嚴重不足,采摘果實成上升,嚴重制約了我國種植業的發展。本文設計了一種機械臂結構,不再需要人工扶持加緊樹干,并且夾持更加緊固。另外,在機械臂上設計了水果收集裝置,提高了采摘效率。
2 結構設計方案
圖1 為機械臂整體結構,圖中未畫出固定于各個(轉下頁)連桿關節上的柔性帆布。此裝置的運動功能主要有兩個:第一,夾緊樹干;第二,張開收集帆布。實現這兩項功能的驅動器是電機2。該裝置的工作程序如下:首先,電機帶動與聯軸器3 相連接的蝸桿。當蝸桿驅動小齒輪17 時,帶動階梯軸18 轉動,階梯軸與夾持爪底座相配合,使左右兩個夾持爪11 夾緊或者松開。在階梯軸轉動過程中,帶動大齒輪的轉動通過齒輪組6 使連桿組10 發生伸縮動作。當機械臂夾緊樹干并且帆布張開后,振動器1 開啟,使夾持爪11 所夾的樹干進行振動,達到采摘果實的效果。下落的果實通過柔性帆布支撐起的傘狀布兜進行收集,接著順著布兜底下的孔洞經傳輸網道滾入收集框里,即完成一個采摘兼自動收集的工作流程。
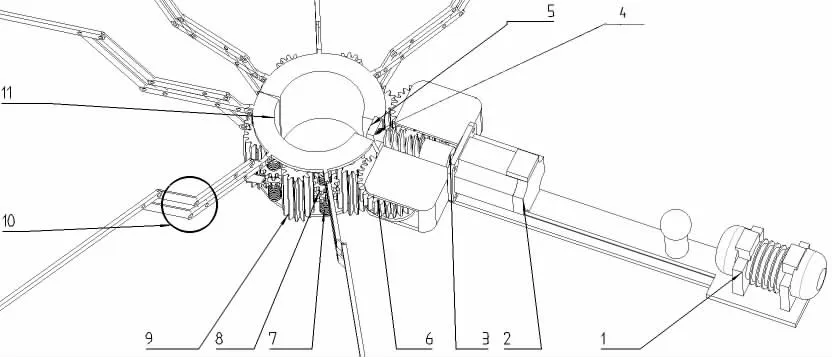
圖1 機械臂整體結構
3 關鍵部件設計及原理
圖2 為夾持爪開合結構設計。夾持爪11 與機械臂底座通過階梯軸18 相配合。當電機工作,蝸桿帶動小齒輪17 轉動。小齒輪與階梯軸18 通過矩形銷16 相配合,階梯軸帶動其左右開合,實現夾緊和松開樹干的運動效果。
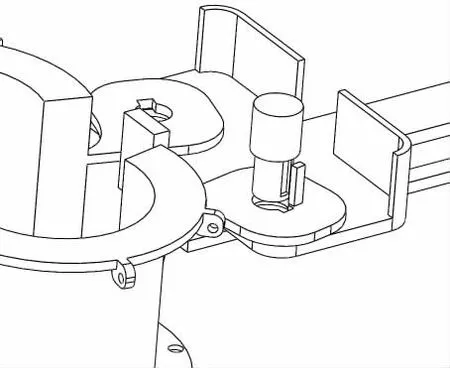
圖2 夾持爪開合結構
圖3 為齒輪組及夾持爪結構圖。圖3a 中,蝸桿帶動小齒輪17 轉動,小齒輪與階梯軸通過矩形銷16 配合,繼而帶動夾持爪轉動。在階梯軸上半部分的另一個鍵槽與弧形銷13 相配合,從而帶動大齒輪運動。大齒輪帶動一系列齒輪組使連桿逐漸張開或閉合。在設計結構時,夾持爪比被支撐起來的連桿先達到結構運動的最終點。該部分設計利用了扭力矩扳手原理。當夾持爪夾緊樹干時,阻力超越矩形銷的彈簧彈力,底座停止轉動。此時,大齒輪繼續轉動,帶動齒輪組將連桿逐漸抬起或落下。當被支撐起的連桿達到它終點時,此時絲杠齒輪螺母8 已到達絲杠頂端,完成連桿組的打開,不再往上端移動。由于矩形彈簧的作用,弧形銷被壓入矩形孔內,大齒輪不再轉動。彈簧14 起到過載保護,當電機堵轉過大,則會按壓下去打滑,保護電機。圖3b 中,每個夾持爪部分都有三組長齒輪9。長齒輪組驅動絲杠轉動,從而帶動絲杠螺母上下運動,兩個絲杠螺母中間的裝置與連桿組10 相連接。加入三組長齒輪組,目的是使每組絲杠螺母升降方向一致。

圖3 齒輪組及夾持爪結構圖
圖4 為機械臂上的連桿組,由三組平行四邊形機構組成。該部分設計模擬了雨傘張開和閉合的過程。當電機工作時,帶動絲杠齒輪螺母8 向上或者向下運動,通過平行四邊形的運動,使長桿伸出或收縮,即可實現收納裝置的展開或者收攏。
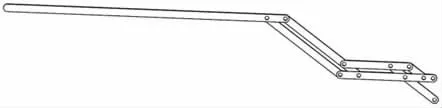
圖4 連桿組結構
4 結論
本文以蝸輪蝸桿及齒輪為傳動結構,設計出模仿雨傘張開收納運動的機械手,以四桿機構為骨架,設計出一種水果收集裝置。該裝置不再需要人工扶持,可直接通過操縱桿控制其夾住樹干和張開收集帆布的效果。本設計的目的是使機械臂振動采摘法的效率得到更大的提升,使采摘及收集一體化,操作更加的方便,再者極大縮小采摘裝置所占的空間體積。振動式水果采摘器結構簡單,可以用于采摘蘋果、梨、柿子等大而密集的水果,采摘效率高,工作方便,對樹干及果實的損傷小。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
電腦報(2019年40期)2019-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49