多層農(nóng)場用電梯擴(kuò)展載貨驅(qū)動系統(tǒng)建模與控制
2020-06-29 01:18:16張今朝魏海峰劉君偉
農(nóng)業(yè)機(jī)械學(xué)報 2020年6期
張今朝 魏海峰 劉君偉
(1.嘉興學(xué)院機(jī)電工程學(xué)院, 嘉興 314001; 2.江蘇科技大學(xué)電子信息學(xué)院, 鎮(zhèn)江 212003)
0 引言
鑒于目前對土地使用面積的限制,現(xiàn)代農(nóng)場已開始向空中發(fā)展,多層及高層農(nóng)場建筑將是發(fā)展趨勢。電梯作為垂直搬運(yùn)的重要設(shè)備,為適應(yīng)農(nóng)場特有環(huán)境的需求,需要拓展新的功能。在大規(guī)模多層養(yǎng)殖農(nóng)場內(nèi),考慮到環(huán)境衛(wèi)生及自動化喂養(yǎng)和載貨的需要,研究自動化輸送裝置及技術(shù)非常必要[1-2]。
目前,典型的養(yǎng)豬農(nóng)場中,先進(jìn)的自動化飼養(yǎng)機(jī)械涉及飼料投放、傳送帶自動清糞和自動化料線等[3-5]。電梯(主要指貨梯)作為一種機(jī)電一體化特種設(shè)備,其垂直運(yùn)載功能同樣符合高層農(nóng)場的需求,其由曳引系統(tǒng)、導(dǎo)向系統(tǒng)、轎廂、門系統(tǒng)、質(zhì)量平衡系統(tǒng)、電力拖動系統(tǒng)、電氣控制系統(tǒng)和安全保護(hù)系統(tǒng)等組成[6]。其中,影響電梯安全的核心部件是曳引系統(tǒng)和門系統(tǒng)。曳引系統(tǒng)主要由低速、轉(zhuǎn)矩較大的永磁同步電機(jī)和導(dǎo)向系統(tǒng)構(gòu)成,通過永磁同步電機(jī)先進(jìn)控制方法獲得曳引系統(tǒng)優(yōu)越的動態(tài)性能[7-10],符合節(jié)能環(huán)保的要求[11-12]。但農(nóng)場電梯轎廂在垂直輸送貨物同時,還需要在平層將所載貨物進(jìn)行自動化進(jìn)出輸送,由于環(huán)境特殊,現(xiàn)場無人為電梯操作。自動化立體車庫升降功能可實現(xiàn)貨物自動移進(jìn)或移出轎廂[13-14],但其結(jié)構(gòu)和控制復(fù)雜,不適合農(nóng)場使用。
本文針對現(xiàn)代規(guī)模化家畜養(yǎng)殖多層農(nóng)場用電梯功能需求,在普通貨用電梯上增設(shè)飼料及廢棄物輸送自動裝備,通過轎廂和每層停靠層門處安裝的電機(jī),實現(xiàn)多電機(jī)協(xié)調(diào)控制,以期達(dá)到載貨驅(qū)動系統(tǒng)穩(wěn)定運(yùn)行的目的。
1 養(yǎng)殖農(nóng)場電梯系統(tǒng)結(jié)構(gòu)拓展
對于大型現(xiàn)代家畜飼養(yǎng)場,為了節(jié)省用地和便于統(tǒng)一規(guī)范化管理,往往將飼養(yǎng)場建成多層養(yǎng)殖大樓。如多層養(yǎng)豬場布局所涉及到的主要設(shè)備有全自動飼喂設(shè)備、各類自動化料線、欄位的安裝、飲水排泄、通風(fēng)降溫、保暖等環(huán)控設(shè)備。隨著規(guī)模擴(kuò)大,定時定點進(jìn)行集中物料運(yùn)送和排放,包括群豬移送、飼料投放和糞便等雜物輸出,可以利用電梯進(jìn)行輸送,如圖1所示。
由圖1可知,與普通客梯不同,轎廂里面運(yùn)載可移動貨車,貨車通過車輪滾動進(jìn)出轎廂,在電梯底板上裝有傳動齒輪和驅(qū)動電機(jī)(層門處的樓層地板上也安裝有電機(jī)、傳動齒輪和測速齒輪),貨車底部朝轎廂底板的一面固定有齒條,當(dāng)貨車需要移動時,電機(jī)轉(zhuǎn)動帶動齒輪,并驅(qū)動齒條推動小車移動。如果電梯平層后,小車從轎廂滑向樓層地板,則先從轎廂駛出,齒條觸碰到地板上測速齒輪時,電機(jī)運(yùn)行,帶動齒輪驅(qū)動小車;當(dāng)位置傳感器檢測到小車到達(dá)確定位置之后,電機(jī)停轉(zhuǎn)。
考慮到農(nóng)場環(huán)境因素,電梯的主要功能為運(yùn)送貨物,且由電梯自動完成,電梯運(yùn)行過程分為兩個模塊:載貨小車推入電梯;用電梯將貨車送到指定樓層,步驟如下:
(1)載貨小車推入電梯
步驟1:載貨小車放在層門口地板滑槽位置,給出呼梯信號,待梯。
步驟2:電梯轎廂在指定樓層停下,曳引機(jī)停機(jī),抱閘。門機(jī)開啟開轎廂門,層門開鎖連同轎廂門打開。
步驟3:齒輪在電機(jī)驅(qū)動下,將小車推入轎廂,小車下面齒條接觸到轎廂底板上的測速齒輪17后,電機(jī)運(yùn)行,通過齒條傳動送到指定位置,電機(jī)停轉(zhuǎn)。
步驟4:門機(jī)啟動,關(guān)轎廂門和層門,層門上鎖,松閘,曳引機(jī)啟動,電梯運(yùn)行。
(2)電梯將貨車送到指定樓層
步驟1:電梯載貨運(yùn)行到指定樓層,減速,平層。
步驟2:門機(jī)工作,轎廂門帶動層門開鎖、打開。
步驟3:轎廂底板驅(qū)動電機(jī)運(yùn)行,齒輪與齒條傳動,載貨小車在齒輪推動下,四輪沿固定滑槽向轎廂外滑動。
步驟4:載貨小車部分移出轎廂,沿所在樓層層門外地板固定滑槽滑動,齒條接觸到測速齒輪18后,安裝在地板上電機(jī)運(yùn)行,驅(qū)動齒輪與齒條嚙合運(yùn)行,驅(qū)動載貨小車運(yùn)行,直到位置傳感器給出信號為止,表示小車已經(jīng)移動到確定位置,進(jìn)入卸貨或裝貨步驟。
2 電機(jī)運(yùn)行模型及參數(shù)分析
2.1 多臺電機(jī)運(yùn)行狀態(tài)
從以上運(yùn)行步驟來看,電梯運(yùn)行過程中,完整的一個周期,驅(qū)動系統(tǒng)由4臺電機(jī)組成,分別是曳引電機(jī)、門電機(jī)和載貨小車的2臺驅(qū)動電機(jī)。其中曳引電機(jī)和門電機(jī)的運(yùn)行邏輯是任何時間只有其中1臺在運(yùn)行,即當(dāng)曳引電機(jī)運(yùn)行時,轎廂閉合,禁止開關(guān)門,則門電機(jī)是停轉(zhuǎn)狀態(tài);當(dāng)門電機(jī)工作時,表示轎廂門和層門在開啟狀態(tài),此時轎廂鋼絲繩被抱閘,曳引電機(jī)處于失電停止?fàn)顟B(tài)。而轎廂完全打開之后,載貨小車進(jìn)出轎廂,轎廂底板及層門地板上驅(qū)動電機(jī)協(xié)調(diào)運(yùn)行狀態(tài),曳引電機(jī)和門電機(jī)皆處于停轉(zhuǎn)狀態(tài),只有載貨車完全進(jìn)入轎廂或完全移出轎廂時,門電機(jī)才運(yùn)行以關(guān)閉轎廂門及層門,后續(xù)工作狀態(tài)如此反復(fù)。
小車移出轎廂外時,貨車尾與層門外壁安全距離也為lΔ。設(shè)置轎廂底部驅(qū)動齒輪位于轎廂中線右側(cè),層門外驅(qū)動齒輪位于中線h′0左側(cè),以保證兩電機(jī)的“接力”距離。
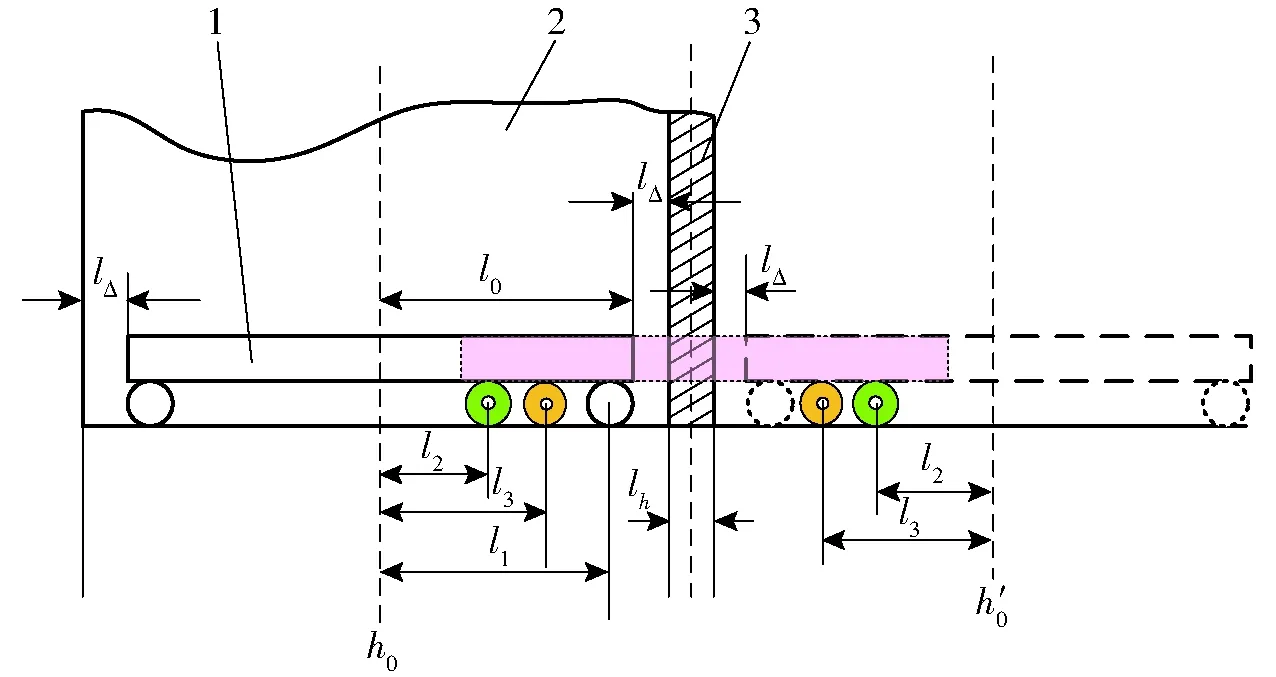
圖2 載貨小車驅(qū)動系統(tǒng)路線圖Fig.2 Truck drive system road map1.貨車 2.轎廂 3.層門
2.2 電機(jī)運(yùn)行模型分析
假設(shè)不考慮電機(jī)的損耗,曳引電機(jī)采用永磁同步電機(jī)(電機(jī)1)以外,其他3臺都采用三相感應(yīng)電機(jī)(門電機(jī)為電機(jī)2,轎廂底驅(qū)動電機(jī)為電機(jī)3,電梯停靠時,只有一個層門處電機(jī)工作,設(shè)為電機(jī)4),根據(jù)4臺電機(jī)的運(yùn)行邏輯關(guān)系,以電梯運(yùn)送貨物到指定樓層為例,得到時間段及工況邏輯如表1所示。

表1 電梯送貨物時電機(jī)運(yùn)行狀態(tài)與時間的對應(yīng)關(guān)系Tab.1 Corresponding relationship between motor operation and time when elevator delivered goods
除曳引電機(jī)和門電機(jī)在運(yùn)行時根據(jù)電梯行進(jìn)和轎廂門、層門關(guān)閉邏輯關(guān)系獨立運(yùn)行外,電機(jī)3和電機(jī)4之間在時段t5~t6通過齒輪齒條協(xié)調(diào)運(yùn)行,可認(rèn)為是硬連接,時段t4~t5為軟連接。
(1)
其中
Fz=mgμ
式中Tz——等效轉(zhuǎn)矩,N·m
Fz——移動載貨小車所需驅(qū)動力,N
vz——載貨小車直線速度,m/s
陶瓷紋飾的作用已經(jīng)從基本的視覺愉悅性上升到人的精神感染的范疇,人們對紋飾的感悟也是有了更加深刻的見解。獅子作為外來的瑞獸形象,在逐漸融入中國文化的時候,已經(jīng)成為中國傳統(tǒng)紋飾的經(jīng)典形象而流傳下來。當(dāng)現(xiàn)代陶瓷藝術(shù)陷入瓶頸之時,不妨從傳統(tǒng)的紋飾中汲取養(yǎng)分,靜心思考,以求創(chuàng)作出更加優(yōu)異和能引起人共鳴的藝術(shù)作品。
n——電動機(jī)轉(zhuǎn)速,r/min
m——小車質(zhì)量(連同貨物),kg
μ——滑動摩擦因數(shù)
設(shè)電機(jī)3到齒輪的傳動比為j,根據(jù)式(1),可得電機(jī)輸出轉(zhuǎn)矩為
(2)
式中Tl——電機(jī)輸出轉(zhuǎn)矩,N·m
ωr——轉(zhuǎn)子角速度,rad/s
考慮到兩電機(jī)負(fù)載相同,電機(jī)極對數(shù)相同,則任一電機(jī)在同步旋轉(zhuǎn)坐標(biāo)系mt下有
(3)
(4)
np——電機(jī)極對數(shù)
Lm——坐標(biāo)系mt定子與轉(zhuǎn)子同軸等效繞組間的互感,H
J——電機(jī)轉(zhuǎn)動慣量,kg·m2
Lr——坐標(biāo)系mt轉(zhuǎn)子等效兩相繞組的自感,H
ist——定子電流在坐標(biāo)系mt的t軸分量
ψr——轉(zhuǎn)子磁鏈,Wb
ω1——定子角速度,rad/s
Tr——轉(zhuǎn)子勵磁時間常數(shù)
由式(3)、(4)可得
(5)
如電機(jī)3、電機(jī)4兩臺電機(jī)固有參數(shù)及齒輪傳動系統(tǒng)完全相同,則同時驅(qū)動小車時,結(jié)合文獻(xiàn)[15],可得
(6)

ωr3——電機(jī)3角速度,rad/s
ψr3——電機(jī)3轉(zhuǎn)子磁鏈,Wb
Tz3——電機(jī)3等效轉(zhuǎn)矩,N·m
ism3——電機(jī)3定子電流在mt坐標(biāo)系的m軸分量,A
ωr4——電機(jī)4角速度,rad/s
ψr4——電機(jī)4轉(zhuǎn)子磁鏈,Wb
Tz4——電機(jī)4等效轉(zhuǎn)矩,N·m
ism4——電機(jī)4定子電流在mt坐標(biāo)系的m軸分量,A
ΔT34——兩電機(jī)對通過齒輪齒條之間的轉(zhuǎn)矩差,N·m
ist3——電機(jī)3定子電流在mt坐標(biāo)系的t軸分量,A
ist4——電機(jī)4定子電流在mt坐標(biāo)系的t軸分量,A
平層后,載貨小車在電機(jī)驅(qū)動轉(zhuǎn)矩驅(qū)動下,從轎廂到所到樓層的層門處。如圖2所示,先由電機(jī)3獨立通過驅(qū)動齒輪將載貨小車移至轎廂門外,驅(qū)動力為F3,再由電機(jī)4“接力”,兩臺電機(jī)同時驅(qū)動載貨小車,此時兩臺電機(jī)的驅(qū)動力都為F34,最后由電機(jī)4獨立將載貨小車移動到(小車左側(cè))距層門lΔ處,整個過程,載貨小車受到的驅(qū)動力變化為F3→F34→F4,當(dāng)小車所載貨物質(zhì)量不同時,則電機(jī)對應(yīng)的轉(zhuǎn)矩Tz3、T34、Tz4在運(yùn)行時也相應(yīng)動態(tài)調(diào)整。
3 轉(zhuǎn)矩多參數(shù)加權(quán)模型
通過前面分析,如當(dāng)轎廂門打開,電機(jī)3驅(qū)動小車,通過滾輪移出轎廂,首先接觸到測速齒輪,作為“接力”作用的電機(jī)4得到轉(zhuǎn)速的信號,開始運(yùn)轉(zhuǎn),通過齒輪齒條與電機(jī)3協(xié)調(diào)運(yùn)行,對式(6)進(jìn)行拉氏變換,得到
(7)
由式(7)可看出,兩電機(jī)參數(shù)較多,非線性和耦合性強(qiáng),以三相異步電動機(jī)動態(tài)模型作為控制對象,按轉(zhuǎn)子磁場定向矢量控制時,需建立轉(zhuǎn)子磁鏈、轉(zhuǎn)矩計算模型以供反饋之用,其估算結(jié)果受參數(shù)的非線性和強(qiáng)耦合性影響較大,如果直接建立轉(zhuǎn)矩、磁鏈和轉(zhuǎn)速線性加權(quán)模型,則可以提高驅(qū)動系統(tǒng)的動態(tài)性能,兩臺電機(jī)也無需安裝轉(zhuǎn)矩傳感器。根據(jù)文獻(xiàn)[16]建立函數(shù)關(guān)系
(8)
式(8)表明了函數(shù)fT(·)、fψ(·)、fθ(·)與電機(jī)拖動轉(zhuǎn)矩Te(k)、轉(zhuǎn)子磁鏈ψr(k)、位置角θr(k)、電機(jī)轉(zhuǎn)速ωr、電流分量ist和ism當(dāng)前及前2步值之間的函數(shù)關(guān)系。限于本文篇幅,僅對電機(jī)3拖動轉(zhuǎn)矩進(jìn)行建模,其他參數(shù)以此類推。
對轉(zhuǎn)矩及各參數(shù)值取N個樣本的數(shù)據(jù)集合,令
φ(k)=[T3(k-1)ist3(k-1)ism3(k-1)
ωr3(k-1)]
(9)
φ(k)=[T3(k-1)T3(k-2)ist3(k-1)
ist3(k-2)ism3(k-1)ism3(k-2)
ωr3(k-1)ωr3(k-2)]
(10)
式中φ(k)——輸入變量
φ(k)——調(diào)度變量

(11)
ρ——調(diào)度函數(shù)
χi——局部模型參數(shù)
參數(shù)Γ、ρ、si求法見文獻(xiàn)[15],不再贅述。對于模型結(jié)構(gòu)參數(shù),根據(jù)G-K模糊聚類方法[18]進(jìn)行求解,得聚類中心
(12)
其中
(13)
式中μik——隸屬度
[μik]c×N——樣本φ(k)屬于第i個聚類中心的程度
通過求取目標(biāo)函數(shù)的最小值求取聚類中心和最佳聚類個數(shù)copt,即
(14)
其中

(15)
式中d(φ(k),νi)——樣本φ(k)與聚類中心νi之間的距離
協(xié)方差矩陣Fi計算式為
(16)
其中
(17)
局部模型參數(shù)χi可辨識由最小二乘算法來實現(xiàn)[19],表示為
(18)

式中λi——第i個聚類中Ni個輸入向量
T3——第i個聚類中Ni個系統(tǒng)輸出
Q——第i個聚類中樣本φ(k)的最大隸屬度
采用均方根誤差ERMSE表示模型輸出與實際輸出精度,計算式為
(19)
式中T3(k)——兩電機(jī)轉(zhuǎn)矩差的實際值
基于滿意模糊G-K均值聚類的多模型建模方法,步驟如下:
(1)由調(diào)度變量φ(k)樣本,取聚類個數(shù)c∈[2,cmax],初始聚類中心數(shù)可取c=2,考慮精度要求,可取閾值范圍0.01≤ε≤0.05。
(2)以兩個最不相似的樣本作為初始聚類中心,即兩中心距離最遠(yuǎn),表示為
(20)
(3)由式(12)計算聚類中心,并根據(jù)式(15)、(16)計算d2(φ(j),νi)和Fi。
(5)若‖Ul-Ul-1‖<ε,則迭代結(jié)束;否則,令l=l+1,跳轉(zhuǎn)到步驟(3)。
迭代結(jié)束后,隸屬度矩陣U=[μi,j]c×N,則可得到聚類中心V=[ν1ν2…νc]。
(6)由聚類結(jié)果計算高斯基函數(shù)寬度si及第i個模型適用域[20]
(21)
Γi∈[vi-siz,vi+siz]
(7)根據(jù)式(18)計算局部模型參數(shù)χi。

4 載貨小車雙電機(jī)矢量控制分析
4.1 多參數(shù)線性加權(quán)模型矢量控制
如前所述,轎廂到每個指定的樓層停靠,當(dāng)層門打開后,小車移動時都需要里外2臺電機(jī)驅(qū)動,而層門處的電機(jī)在小車移出轎廂時,起著接力的作用,最后把小車停在指定位置。由于不同樓層有不同的電機(jī)和轎廂底的電機(jī)進(jìn)行配合,小車移出時,可以將轎廂里的電機(jī)作為主電機(jī),而當(dāng)小車從轎廂外駛?cè)霑r,層門處的電機(jī)為主令電機(jī)。以小車移出轎廂來分析,如圖3所示,兩臺電機(jī)工作在轉(zhuǎn)子磁鏈定向模式下,考慮到系統(tǒng)穩(wěn)定性,系統(tǒng)運(yùn)行時保證磁鏈固定不變,轉(zhuǎn)速和轉(zhuǎn)矩作為主要閉環(huán)結(jié)構(gòu),使電機(jī)4跟蹤主令電機(jī)3轉(zhuǎn)速運(yùn)行,同時驅(qū)動小貨車時,兩電機(jī)輸出轉(zhuǎn)矩相保,以保證協(xié)調(diào)運(yùn)行。

圖3 小貨車驅(qū)動系統(tǒng)控制模塊圖Fig.3 Truck drive system control module diagram
圖3中,ATR和AψR分別為轉(zhuǎn)矩和磁鏈PI調(diào)節(jié)器,ACMR和ACTR分別為電流分量控制器,輸出為坐標(biāo)系mt電壓分量,多參數(shù)加權(quán)模型為式(8)。
4.2 實驗控制分析
4.2.1模型估計
由式(8)~(10)的轉(zhuǎn)矩映射關(guān)系可知,為驗證多參數(shù)加權(quán)模型的有效性,利用系統(tǒng)模型在轉(zhuǎn)子磁場定向矢量控制模式,各輸入端加激勵信號。如圖4所示,虛線框處輸入隨機(jī)信號作為干擾信號。采樣周期取0.001 s。樣本數(shù)取5 000組,向量階數(shù)取2。電機(jī)3、4的參數(shù)如表2所示。根據(jù)前述多模型建模步驟,當(dāng)子模型數(shù)為5時,滿足條件ε=0.02。
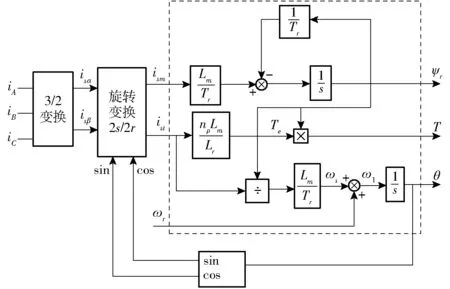
圖4 輸入輸出參數(shù)系統(tǒng)Fig.4 Input and output parameter system
電機(jī)3轉(zhuǎn)矩子模型估算為

表2 電機(jī)3、4部分參數(shù)Tab.2 Parameters of motor 3 and 4
T3(1)(k)=9.001 1T3(k-1)-1.107 5T12(k-2)+
3.125 5ism3(k-1)-0.960 1ism3(k-2)+
4.100 0ist3(k-1)+1.201 3ist3(k-2)+
5.091 0ωr3(k-1)-1.401 8ωr3(k-2)+1.058 6
T3(2)(k)=8.701 2T3(k-1)+2.510 0T12(k-2)+
2.001 0ism3(k-1)-0.320 1ism3(k-2)+
3.007 7ist3(k-1)+1.178 1ist3(k-2)+
6.024 5ωr3(k-1)-1.402 3ωr3(k-2)-0.088 9
T3(3)(k)=6.630 3T3(k-1)+4.602 0T12(k-2)+
3.393 9ism3(k-1)-1.300 1ism3(k-2)+
2.044 4ist3(k-1)-0.285 7ist3(k-2)+
5.708 6ωr3(k-1)+0.882 1ωr3(k-2)+3.747 0
T3(4)(k)=3.205 6T3(k-1)+11.186 3T12(k-2)+
4.075 7ism3(k-1)-2.022 5ism3(k-2)+
7.101 4ist3(k-1)+1.202 2ist3(k-2)-
0.100 8ωr3(k-1)+3.770 0ωr3(k-2)+1.020 0
T3(5)(k)=10.085 2T3(k-1)+7.151 4T12(k-2)-
2.363 3ism3(k-1)+4.019 0ism3(k-2)+
4.659 0ist3(k-1)-1.332 7ist3(k-2)+
2.400 9ωr3(k-1)+2.003 3ωr3(k-2)+1.700 0
給系統(tǒng)加入隨機(jī)信號,取前2 000組進(jìn)行訓(xùn)練,得到子模型,取得加權(quán)之后,在3 s內(nèi)進(jìn)行驗證,如圖5a所示。圖5b為估計誤差曲線,均方根誤差為0.080 4 N·m,所得模型估計值有效逼近了參考模型的非線性特征。

圖5 模型估算與實際輸出對比Fig.5 Comparison of model estimation and actual output
4.2.2控制過程分析
與轉(zhuǎn)矩模型建模方法相同,可分別估計轉(zhuǎn)子磁鏈ψr、轉(zhuǎn)子位置角θr。與轉(zhuǎn)矩一起組成多參數(shù)加權(quán)模型,在矢量控制中,形成ψr、θr和Te的3個反饋量,兩臺電機(jī)分別構(gòu)成閉環(huán)控制系統(tǒng),如圖3所示。
(1)小車從轎廂移出,由圖2可看出,當(dāng)電機(jī)3獨立驅(qū)動小車運(yùn)行至層門外電機(jī)4的測速齒輪處,電機(jī)4開始運(yùn)行,兩電機(jī)協(xié)調(diào)運(yùn)行。為驗證電機(jī)3轉(zhuǎn)矩跟隨性能,給定負(fù)載轉(zhuǎn)矩輸出從25 N·m,降到0 N·m,再上升到15 N·m,圖6a所示電機(jī)轉(zhuǎn)矩輸出與負(fù)載轉(zhuǎn)矩的動態(tài)變化基本吻合。從圖6b可以看出,電機(jī)3轉(zhuǎn)速在負(fù)載轉(zhuǎn)矩突變時保持良好的調(diào)節(jié)性能。
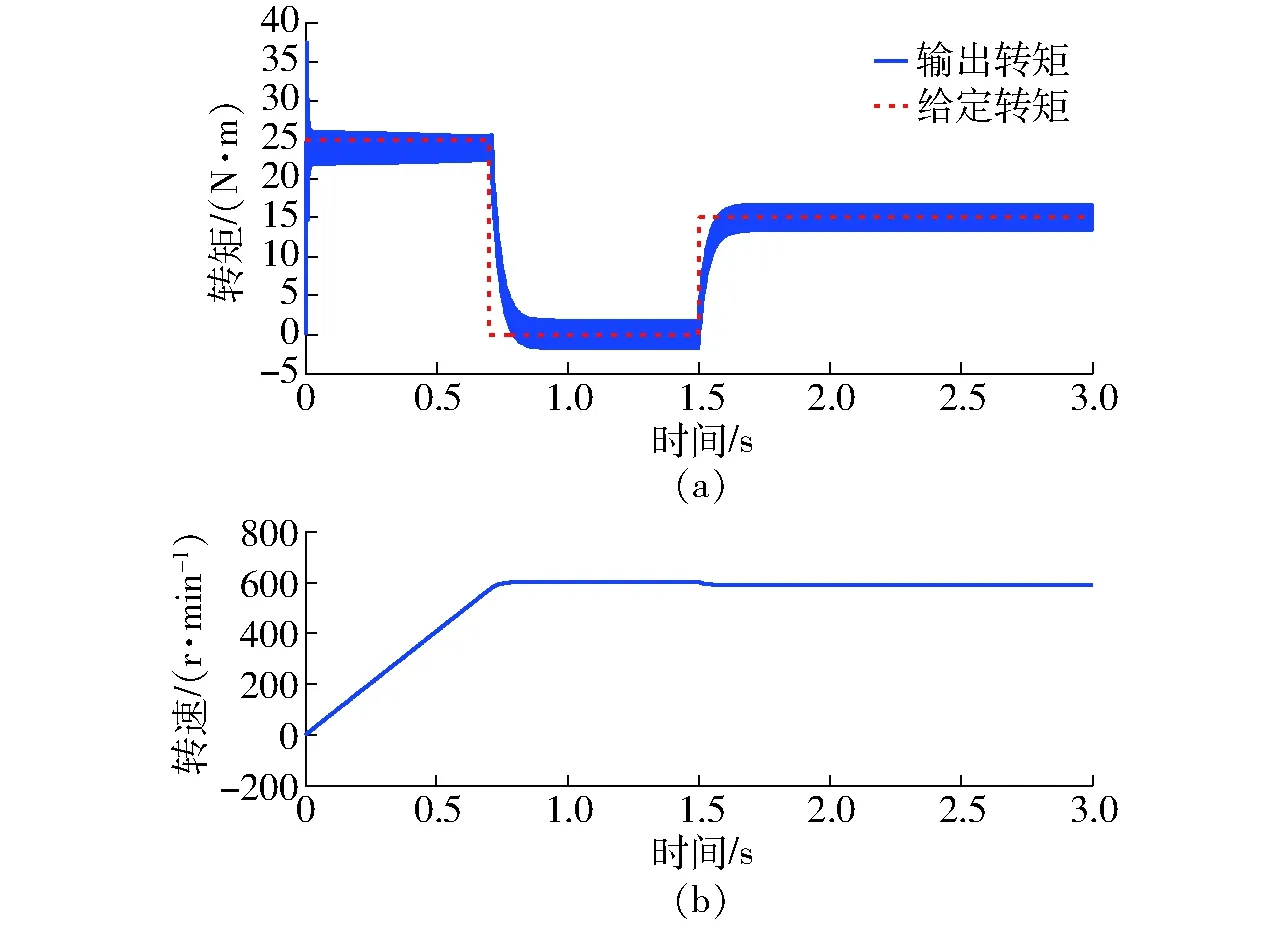
圖6 電機(jī)3控制時轉(zhuǎn)速和轉(zhuǎn)矩波形Fig.6 Speed and torque waveforms during motor 3 control
(2)由圖2可知,當(dāng)小車車尾運(yùn)行至電機(jī)3右側(cè)測速齒輪時,此時小車完全由電機(jī)4驅(qū)動,負(fù)載轉(zhuǎn)矩由15 N·m再突變到30 N·m,其轉(zhuǎn)速曲線如圖7所示。由圖7電機(jī)轉(zhuǎn)矩輸出可以看出,電機(jī)4轉(zhuǎn)速在負(fù)載轉(zhuǎn)矩突變時運(yùn)行平穩(wěn),電機(jī)轉(zhuǎn)矩輸出與負(fù)載轉(zhuǎn)矩的動態(tài)變化也基本吻合。
5 結(jié)束語
根據(jù)目前多層養(yǎng)殖農(nóng)場的電梯需求,在普通貨梯基礎(chǔ)上,設(shè)計了以自動化形式搬運(yùn)飼料、畜禽或廢棄物等功能,提出了電梯轎廂驅(qū)動系統(tǒng)的結(jié)構(gòu)。分析了農(nóng)用電梯在轎廂門和層門開啟時的載貨小車平穩(wěn)進(jìn)出過程。建立了2臺電機(jī)協(xié)調(diào)運(yùn)行的數(shù)學(xué)模型,為保證載貨小車運(yùn)行時的平穩(wěn)性和可靠性,將傳統(tǒng)的三相異步電動機(jī)轉(zhuǎn)子與轉(zhuǎn)矩模型整合為一個多參數(shù)線性加權(quán)模型,簡化了驅(qū)動系統(tǒng)的結(jié)構(gòu),提出了基于多參數(shù)線性加權(quán)模型的雙電機(jī)按轉(zhuǎn)子磁場定向矢量控制方法。通過實驗證明了此方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中國品牌(2019年10期)2019-10-15 05:57:12
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年3期)2018-01-31 02:18:58
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生時代·綜合版(2016年7期)2016-05-14 17:53:49
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18