管道清管器運行速度控制技術研究進展
2020-06-29 04:10:48劉海瀟何利民陳建恒羅小明赫松濤李清平
化工進展 2020年6期
關鍵詞:模型
劉海瀟,何利民,陳建恒,羅小明,赫松濤,李清平
(1 中國石油大學(華東)儲運與建筑工程學院,山東省油氣儲運安全省級重點實驗室,山東青島266580;2 中海油研究總院,北京100028)
油氣行業中,常使用清管器執行油氣管道雜質清除、應急修復和無損檢測等任務。隨著對管道安全問題和降本增效理念的逐步重視,清管操作已成為全世界油氣管道運行中必不可少的作業規程[1-4]。其中,清管器的運行速度是需要重點控制的參數之一,當其處于合理區間內時(原油管道1~5m/s,天然氣管道2~7m/s),清管效果最佳[5-9];尤其是對于管道內檢測器(ILI),為獲得準確的檢測數據,需要維持其運行速度在穩定值附近[10-12]。
從宏觀角度來講,清管器速度的控制策略可分為被動控制和主動控制[1]。被動控制是指不對清管器骨架結構作改變(即傳統清管器),通過調節管道入口流體流量或操作壓力改變清管器后方的驅動力,從而降低或增大清管器運動速度[9,13-15]。通過被動控制不僅可以改變清管器的全線運行速度,還可以對清管器運行到某一管段處的速度進行控制[4,16],操作較為靈活,是目前應用較為普遍的方式。但被動控制會降低產量,引起生產延期,劣勢明顯[17]。主動控制是隨著檢測技術的發展逐漸興起的一種控制方式,指在不改變管道流量和操作壓力的前提下對清管器結構進行改造,使其運行過程中的驅動壓差改變,從而控制運行速度,該技術主要分為射流清管技術[5,17-23]和清管器智能調速技術[3,8,10-12,24-26]。
為了揭示清管器運行機理和對清管器運行速度進行準確計算,眾多學者對運動模型進行了研究。本文首先對其進行總結,然后以此為基礎分別分析被動控制和主動控制的研究與應用現狀,旨在全面探討管道清管器速度控制策略,尋求其研究發展方向。
1 清管器運動模型
清管器運動模型是研究清管器運動速度的理論基礎,建立準確可靠的運動模型對實現清管器速度的調控有著重要意義。目前對清管器模型的研究主要集中在傳統清管器和近年來逐漸興起的射流清管器。
1.1 傳統清管器運動模型
傳統清管模型的研究較早,模型的建立與研究可追溯至1964年,McDonald等[27]將管道分再生區、帶液膜氣相區、液塞區和未干擾區,利用穩態假設提出了第一個理想的清管模型。1982 年,Barua[28]基于大量以空氣-煤油為介質的清管實驗,對McDonald 模型作了改進,但其仍然屬于穩態模型的范疇。1988年,Kohda 等[29]學者第一次提出以瞬態兩相流方程為基礎的瞬態清管模型,可用于分析入口速率或出口壓力變化所產生的瞬時參數變化。1995 年,Minami 等[30]將管道分為上游瞬態兩相流區、液塞區以及遠離本體瞬態兩相流區,通過歐拉-拉格朗日方法耦合清管模型和瞬變流模型,得到了精度較高的氣液兩相流瞬態清管模型,其對于整個傳統清管模型的發展具有重要的意義。1998年,Lima等[31-32]以清管器為界將管道分為上游和下游,利用雙流體模型建立了可用于分析流體瞬態特性的清管模型,該模型與實驗數據吻合較好,但無法計算清管器前方液塞頭部的具體位置。我國在多相清管領域的研究起步較晚,主要有李玉星[33-34]、徐孝軒[35]等學者針對氣液混輸管線進行研究,建立了相應的清管模型。
1.2 射流清管器運動模型
射流清管器運動模型的研究起步較晚,學者們在傳統清管器運動模型的基礎上,耦合清管器旁通孔的壓降方程,形成射流清管模型,并采用有限差分或特征線等數值方法進行求解。主要的代表性工作及階段性進展如下。
巴西學者Azevedo 等[36-37]于1996 年首次對帶旁通孔的射流清管器進行研究,分別對可壓和不可壓介質流動條件下的射流清管器運動特性進行分析,研究的清管器類型包括帶旁通射流孔的泡沫、直板、皮碗清管器,最終建立了射流清管器理論模型,然后基于實驗數據,開發了PIGSIM清管軟件。韓國學者Nguyen 等[2,38]于2001年對帶有旁通控制閥門的射流清管器進行研究,假設氣體馬赫數小于0.45 且不可壓縮,推導出氣體流過旁通的阻力方程,并建立旁通氣體流速、清管器位置及速度的內在關系,該模型預測清管器速度和位置的準確性較好。Hosseinalipour等[39]研究了射流清管器的瞬態運動特性,基于移動和交錯網格,使用有限差分法求解可壓縮氣體的連續性和動量方程,模擬結果與現場數據吻合性較高。2008年,Tolmasquim等[40]使用有限差分方法對流體動力學方程進行求解,利用收發球裝置上的閥門PID 控制器調整清管器的速度,得到一種有效調節清管器運行速度的方法。2009年,Esmaeilzadeh 等[9]將氣液兩相動力學方程與清管器動量方程相結合,基于規則矩形網格,使用特征線法對非穩態條件下的非線性方程組進行求解,獲得了清管器的位置、上游最佳流量和清管器到達終端的時間。同年,加拿大Botros 等[41]考慮管路起伏及其他參數的變化,包括氣體的性質、壁面摩擦力、旁通射流量、球體前后壓差、皮碗密封性能等,模擬預測結果標準偏差在8%以內。
2 清管器被動控制策略
被動控制通過調節管道入口流體流量或壓力改變清管器的后方驅動力,從而控制清管器運動速度[1]。清管器運行的動力來自管內流體介質的推動,對于液體管道,清管器的速度與流體流動速度基本一致;而當管內含有氣體時(天然氣管道、氣液混輸管道等),由于氣體的可壓縮性,清管器的運行會產生強烈的脈動,清管器難以穩定運行[13],因此當使用傳統清管器時,為控制清管器的運行速度位于合理區間,管道入口流速和操作壓力需要謹慎地選擇[14-15]。Guo 等[14]針對不同管徑的管道給出了清管過程中操作壓力和入口流體流速的建議范圍,該范圍具有一定的參考價值,但在實際工程中難以給出具體合理的操作值。通常在使用被動控制方法之前,需要通過模擬計算優選入口流速和操作壓力[40]。Esmaeilzadeh等[9]使用特征線法(MOC)對清管器運動模型和流體方程進行求解,分別計算了不同氣液入口流速下清管器的運行速度,從而可以得到使清管器運行速度處于合理區間內的流體入口流速,與工程清管數據對比顯示模擬結果良好。目前,多個商業多相流模擬軟件相繼開發了清管模塊,如OLGA、LedaFlow,這些軟件的使用使清管操作的模擬計算更加方便快捷,得到了研究者和工程人員的廣泛應用[15,19,21-22,42-45]。Dykhno 等[15]使用OLGA 軟件模擬了一條5.2 英寸(1 英寸=2.54cm)管道的清管過程,分別研究了不同入口流量和不同終端操作壓力下的清管器運行速度,指出隨入口流量的降低和終端操作壓力的升高,清管器的運行速度均會降低,但過多地降低流體入口流速會使產量大大減小,降低經濟效益,因此可以適當增大終端分離器壓力作為補償。
被動控制不僅可以調節清管器的全線運行速度,還可以對清管器運行到某一管段處的速度進行控制。對于氣液兩相混輸或者含有積液的管道,清管過程中清管器的前方會堆積大量液體,當到達管道終端時,這些積液會使終端設備的液位急劇上升,甚至產生溢流,造成嚴重事故。因此,當清管段塞接近管道終端時,需要對清管器運行速度進行進一步的控制。Abdelhady[16]報道了對一條30 英寸淺海海底高壓天然氣管線使用清管器清除積液的案例,在該清管過程中,管內積液大量堆積在清管器前方,為有效控制終端積液的流出,技術人員在距離清管器到達終端2h 時第一次減小入口流量,隨后對入口流量逐步減小甚至關停部分氣井以控制清管器速度,確保終端段塞捕集器的液位平穩上升。而對于深海海底管線,清管器會因液塞充滿長立管而在立管底部發生停滯,直至后方壓力升高,足以克服液柱靜壓力。清管器啟動后將推動積液流出立管,下游壓力減小,而上游氣體的體積增大幅度很小,壓力幾乎不變,因此清管器在立管中的壓差逐漸增大,運行速度越來越大,當到達終端收球平臺時,會產生極高的速度[4,13],Subash 等[4]對一條長6000ft(1828m)的立管進行了模擬計算,假設清管器到達立管底部時積液能夠充滿整個立管,其在立管頂部速度將達到70ft/s(21.3m/s),這會給終端收球設備帶來極大安全威脅,因此需要對其進行控制。一個簡單有效的控制方法是在立管頂部位置安裝節流閥,使高速流出的液體通過該節流閥而增大清管器前方壓力[4],另外也可以在清管器到達前向立管底部注氣,推動清管段塞提前流出立管[13]。
在被動控制方法中,核心技術是選取合適生產流量和操作壓力,以使得清管器在可操作的驅動壓力下獲得理想運行速度,因此在清管操作前,不同入口條件和操作壓力下,對清管器運行速度的準確計算是關鍵。目前主要依靠多相流軟件(如OLGA、LedaFlow)中的清管模塊進行相關計算,但關于其清管模塊計算準確性并未見相關報道,因此今后需使用工程清管數據,對多相流軟件計算結果進行驗證及合理修正,以獲取準確清管器運行速度計算值。
3 清管器主動控制策略
對于傳統清管操作來講,被動控制法是最常用的清管器速度控制方法,但其弊端也非常明顯:減小入口流速會降低產量,耗時較長,增大清管時間和成本。根據van Spronsen 等[17]對東南亞一條LNG管線現場清管案例的報道,使用傳統清管器時,由于需要控制清管器速度而使得其清管期間輸量下降40%,這不僅帶來較大的經濟損失,還會因為冬季用氣量大而導致長時間無法清管,由此產生較大的安全隱患。因此采用改造清管器結構的主動控制法具有較高的經濟效益和安全意義。目前,主動控制主要分為射流清管技術和智能調速技術。
3.1 射流清管技術
射流清管器通常是指在鋼骨架中心開設旁通孔的一類清管器,在清管過程中,后方氣體可以通過旁通孔進入下游,清管器前后壓差減小,運行速度降低。對射流清管器運動方程進行簡化,忽略其運動過程中的加速,可以得到穩態工況下清管器的速度公式[式(1)][5,46-47]。

式中,Vg為清管器后方驅動氣速,m/s;Vpig為清管器速度,m/s;φ 為清管器旁通率;Ffric為清管器與管壁的摩擦力,N;K為旁通結構的壓降系數;ρbp為旁通孔內的氣體密度,kg/m3;Apipe為管道的橫截面積,m2。通過式(1)可以看出,管道參數、運行工況和清管器特征參數對清管器速度均有重要影響,而作為一種主動控制方法,對射流清管器速度的控制主要通過改變以下三個特征參數實現。
(1)旁通率 旁通率定義為射流清管器旁通孔最小面積與管道截面積之比,選取合適的旁通率是獲得理想速度的最主要方式。
目前,已有數位研究者在室內展開了對射流清管器旁通率與其運行速度之間關系的研究,Chen等[47]在由規格為φ60mm×3mm、長度為100m的不銹鋼管搭建的環道中進行了室內兩相流清管實驗,發現清管器平均運行速度隨旁通率的增大而減小;Hendrix等[48]使用內徑52mm的有機玻璃管在實驗室內搭建了長62m的可視化清管環道,進行了單氣相清管實驗,進一步研究了旁通率對清管器速度的影響,發現清管器平均運行速度與后方驅動氣速之間基本滿足關系式式(1),但隨旁通率的增加,實驗數據與理論關系式之間偏離逐漸增大,因此當選取高旁通清管器時,使用式(1)預估清管器平均速度則會出現較大誤差。
在工程實踐中,為準確獲得射流清管器運行速度,優選合適的旁通率,通常需要借助多相流軟件(如OLGA、LedaFlow 等)的清管模塊或企業自主開發的清管過程模擬軟件進行模擬計算。Entaban等[20]報道了馬來西亞的一條LNG管道射流清管技術運用情況,為了優選射流清管器旁通率,研究者使用殼牌自主研發的模擬軟件分別對旁通率為0、12%、15%的清管器進行了生產工況下的清管過程模擬,發現旁通率的增大可顯著減小清管器速度,但為了避免速度過低而發生清管器卡堵,研究人員最終選擇了12%旁通率。Olaniyan 等[18]分別使用OLGA 和LedaFlow 對一條內徑18in(1in=2.54cm)、長85km 的凝析液管道清管過程進行了模擬計算,研究發現兩款模擬軟件對清管器平均運行速度的計算基本相同。但通過文獻調研,未發現對多相流軟件計算速度的準確性的研究。
(2)壓降系數 壓降系數反映清管器結構對前后壓降的貢獻程度,是旁通結構的參數,受運行工況影響較小[46,49-52],因此對壓降系數的改變,主要通過選取不同的旁通結構實現。
工程中常用的旁通結構有兩種:直通結構和前端帶折流板結構。這兩種旁通結構壓降系數的計算均缺少準確的理論模型,但結合Idelchik[52]提出的突縮結構和前方繞流結構壓降系數的經驗計算公式、Borda-Carnot 突擴壓降系數經驗計算式[53]提出的突擴壓降系數經驗計算式以及直通通道內沿程摩阻壓降系數計算式,可以得到這兩種旁通結構的壓降系數計算公式[式(2)]。

式中,Ah、Apipe分別為旁通孔和管道橫截面積,m2;L 和d 分別為旁通孔長度和直徑,m;f 為范寧系數,可使用Churchill關聯式[式(3)][54]計算。

式中,h 為折流板與后方旁通孔的水平距離,m;H為折流板直徑,m。
Azpiroz[49]和Hendrix[51]等分別使用CFD模擬的方式驗證了此經驗公式的準確性,計算誤差均在可接受范圍之內。Wu 等[23]指出,帶折流板結構清管器通常驅動力較大,有利于防止在清管過程中發生卡堵。
(3)摩擦力 清管過程中清管器皮碗與管壁之間的摩擦力是阻礙清管器運動的最主要因素,同時是清管器運動模型中的重要參數之一。文獻[5,17-18,20,22]均指出清管過程中理論計算與現場數據之間產生偏差的重要原因是摩擦力的不準確計算,陳建恒等[55]使用OLGA 軟件研究了摩擦力偏差對清管器速度計算的影響(圖1),指出為了模擬清管器運行速度,需要準確獲知摩擦力大小。
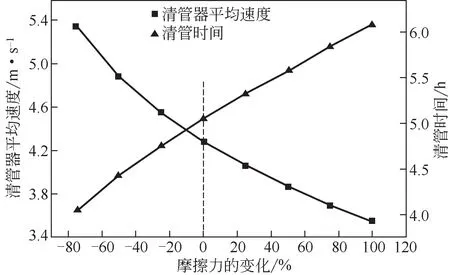
圖1 清管器平均速度和清管時間隨摩擦力的變化曲線[55]
文獻[9,56-59]分別使用Shigley 過盈配合關系、簡化數學模型以及有限元等方法提出了計算摩擦力的數學模型,均表示能夠控制計算誤差在合理范圍之內。橡膠柔軟皮碗的摩擦學特性、可靠性研究對油氣管道的高效清管具有重要意義[60-62],因此譚桂斌等[63-65]針對蠟基油管道,對管道蠟層剝離和切屑變形去除等動態特性展開研究,建立了密封橡膠皮碗運移力學模型。但由于摩擦力的影響因素眾多,且計算過程相對繁瑣,工程實踐中較少采用,為了準確快捷地獲得管壁與皮碗之間的摩擦力大小,室內試驗及現場應用時常使用以下三種方法:穩態計算法[47-48]、反算法[18,22]、牽拉法[58]。
射流清管技術作為一項主動控制清管器運行速度的方法,其對速度的調控主要通過基于不同管道規格及運行工況更換不同旁通率來實現,而旁通率的優選則依賴于對壓降系數和摩擦力的準確計算。目前壓降系數計算的相關研究已經完善,可以對射流結構的壓降系數進行準確計算;而對于皮碗與管壁間的摩擦力計算,目前仍缺少簡便可靠的工程計算方法,為了射流清管技術的進一步推廣,今后應開展建立清管器皮碗與管壁間摩擦力的工程計算模型。
3.2 智能調速技術
對于管道內檢測器來講,為了獲得準確的檢測數據,需要將運行速度控制在某一穩定值附近(一般小于4m)[3,10],因此管道內檢測器常帶有速度控制單元,其常見結構如圖2 所示,工作原理如下:設備上安置的里程傳感器檢測清管器運行速度Vp,并將其傳送給控制單元,控制單元將Vp與預設閾值上下限Vmax和Vmin進行比較,若Vp≥Vmax,說明清管器運行速度過快,則控制步進電機打開轉動葉片,轉動葉片與固定葉片之間形成旁通,此時有流體經過旁通流向下游,驅動力因此減小,清管器速度減小;相反地,當Vp≤Vmin時則關閉轉動扇葉,清管器前后壓差增大,速度進而提高,直至運行速度置于預設區間[24]。
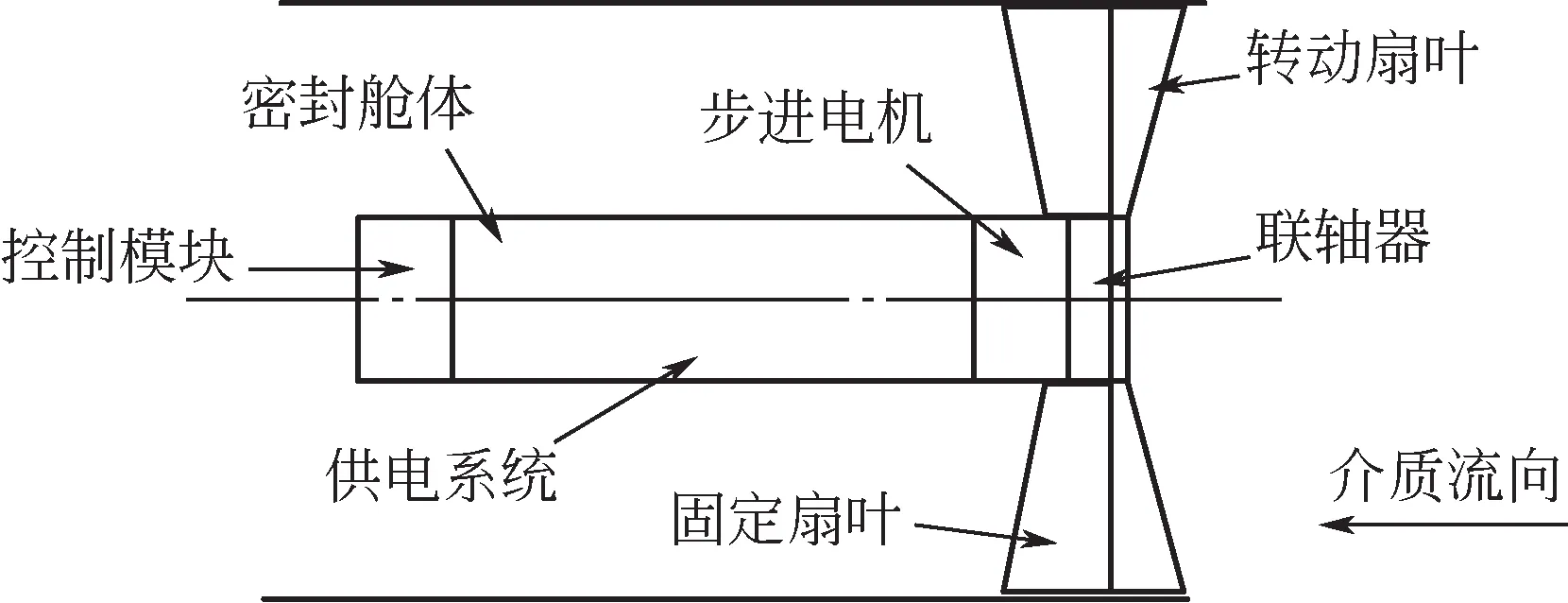
圖2 速度控制單元結構
速度控制單元所采用的控制策略是調速清管器設計中的關鍵,由于國外技術的封鎖,此處可考文獻較少。據Rahe[10]的報道,最初的控制策略基于簡單的閾值判別,即當清管器速度高于上限值10%時,則打開旁通閥降速,當低于下限值10%時關閉旁通閥提高速度,這種控制方法較為簡單,能夠有效防止清管器速度的過大或過小,但調節過程過于死板,極易引起清管器速度的強烈脈動。Nguyen[6]和Rahe[10]等均提出了非線性控制策略。Nguyen 等[6]基于構造的Lyapunov 方程,采集清管器位置、速度和旁通孔流體流速三個參數作為依據控制旁通孔的開度,實驗結果顯示控制效果良好;Rahe[10]則將清管器速度作為唯一的參考變量,建立了簡化的數學模型,但其轉閥過程耗時較長,調節存在滯后現象。朱霄霄等[24,66-67]沿用將速度作為唯一判別依據的思想,提出了基于PID控制的清管器速度控制策略,引入轉閥調整比例系數P,可由實驗和模擬進行優化整定,執行機構(電動機)所控制的轉閥轉動角度為[式(4)]。

式中,ve為實際速度與預設速度之差。在清管器運行過程中,P為定值,當ve較大時轉動角度較大,ve較小時轉動角度則較小,因此這種控制策略較為靈活,調速反應較快。
旁通閥門是調節清管器驅動力的部件,其能否快速反應在清管器速度調節過程中起著重要作用。根據自由件的運動方向,可以將旁通閥門分為直動調節閥和轉動旁通閥兩種。直動旁通閥有多種形式,常用的有圖3 所示的兩種,其中圖3(a)結構中將外閥體固接于清管器鋼骨架上,電動機控制自由閥體往復移動,從而改變氣體通過的面積,即旁通率,從而達到驅動力的改變[3,68];圖3(b)中則設置錐形旁通孔和控制閥門,通過調節控制閥門的與錐形旁通孔之間的不同距離,改變流體向下游流通的通道大小,進而控制清管器速度。相較于直動旁通閥,轉動旁通閥的控制具有反應速度快、調節時間短的優點[67],因此轉動旁通閥的使用更加廣泛,包括國外的ROSEN公司和Inline公司[69],目前常用的轉閥形式有常見的轉動葉片形式[圖4(a)][24,39,66-67]和Delft 大學聯合殼牌公司研發的球形閥形式[25][圖4(b)]。
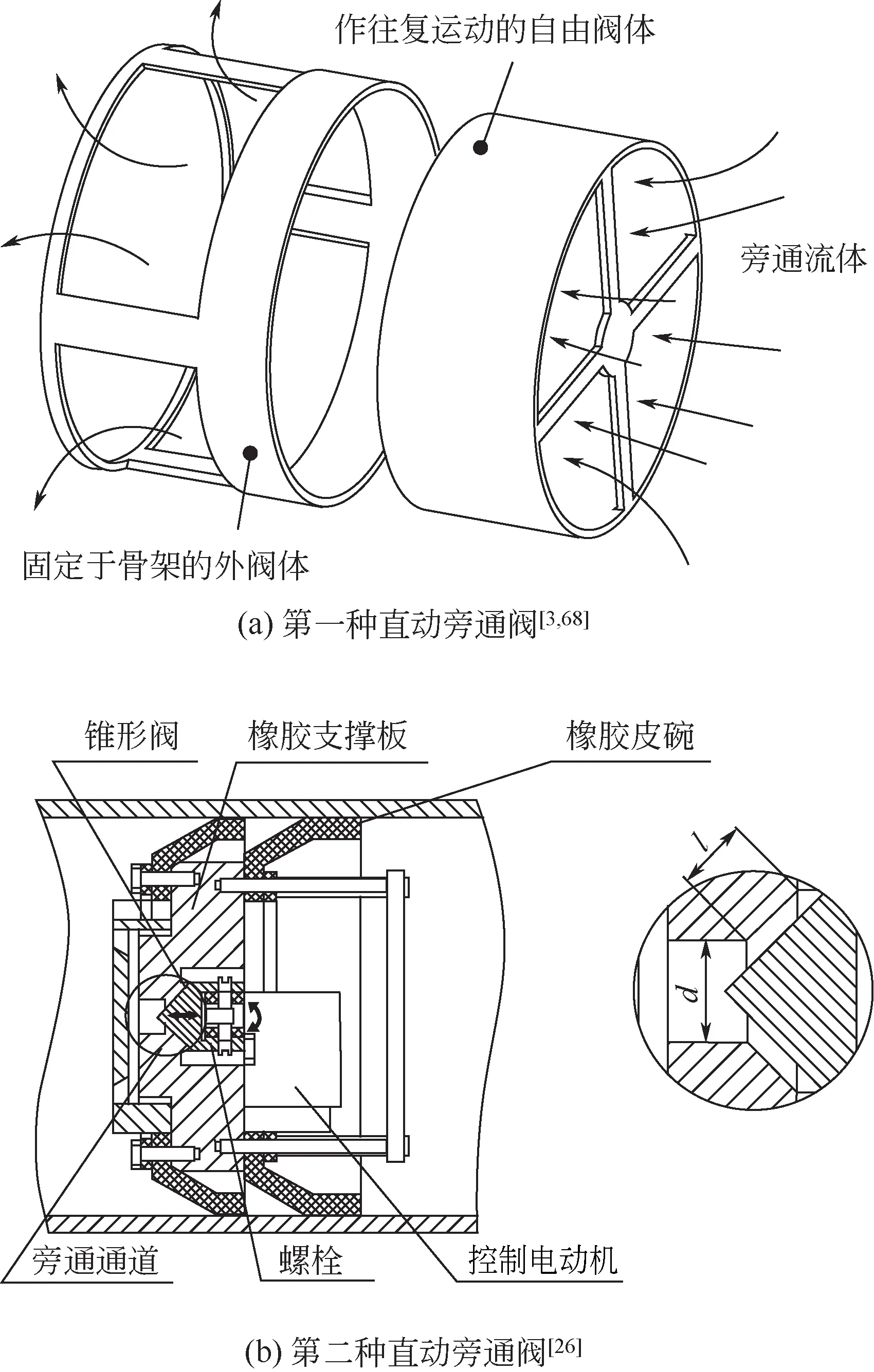
圖3 直通旁通閥
對于內檢測清管器來講,對運行速度的控制極為重要,其中速度控制策略是核心技術,然而目前此項技術受到國外技術封鎖,加大研究穩定可靠的速度調控技術對國內管道檢測水平的提高具有重大意義。
4 總結與展望
4.1 總結
在管道清管操作中,為使清管效果達到最優,清管器的運行速度是需要重點控制的參數之一。清管器運行速度的控制方法可分為被動控制和主動控制,主動控制策略主要有射流清管技術和智能調速技術兩種,分別應用于不同清管任務中。
被動控制通過調節管道入口流體流量或壓力改變清管器的后方驅動力,從而控制清管器運動速度。此方法不僅可以改變清管器的全線運行速度,還可以對清管器運行到某一管段處時的速度進行控制,操作較為靈活,應用普遍,相關操作實踐廣泛,但被動控制會降低產量,引起生產延期,劣勢明顯。
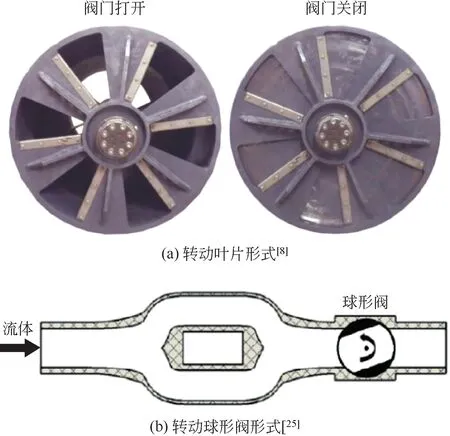
圖4 轉動旁通閥
射流清管技術在鋼骨架中心開設旁通孔,主要通過調節旁通率、壓降系數和摩擦力三個參數改變清管器運行速度,其中優選旁通率是最主要的控制方式;旁通率的優選主要基于壓降系數和摩擦力的準確計算;通常使用多相流軟件清管模塊或數學模型進行清管器的速度模擬計算,選擇合適旁通率。
清管器智能調速技術主要應用于管道內檢測,其核心技術是速度控制單元中速度控制策略的選取和設計;旁通閥門是改變清管器驅動力的部件,主要分為直動式和轉動式,轉動式閥門因其調節靈活和反應迅速而得到廣泛應用。
4.2 展望
在被動控制方法中,為了選取合適生產流量和操作壓力,不同入口條件下清管器運行速度的準確計算是關鍵;目前主要依靠多相流軟件清管模塊進行相關計算,但其計算準確性需要進行進一步的驗證和相關修正。
射流清管器的速度控制依賴于旁通率的優選,在優選過程中,壓降系數和摩擦力的準確計算是關鍵步驟,尤其是對于摩擦力,目前仍缺少簡便可靠的計算方法;未來開展清管器皮碗與管壁間摩擦力的工程計算方法將有助于射流清管技術的進一步推廣。
清管器智能調速技術中速度控制策略是核心技術,目前受到國外技術封鎖,研究穩定可靠的速度調控技術對國內管道檢測水平的提高具有重大意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19