備自投裝置運行方式快速切換及復歸邏輯的仿真設計
2020-06-29 06:27:30趙明
江西電力 2020年6期
關鍵詞:系統
趙 明
(東方電子股份有限公司,山東煙臺264000)
0 引言
備自投裝置能夠在供電電源因故障斷開時,將負荷自動轉供至備用電源,是保證電力系統連續可靠供電的重要設備[1-4]。“兩線三變”擴大內橋接線方式可以滿足負荷增長及電網規劃建設的需要,兼具運行方式靈活等優點,在城區110kV擴容改造變電站和110kV新建變電站工程中均得到了推廣應用[5-13]。
國家電網公司發布的文件Q/GDW10766—2015《10kV~110(66)kV線路保護及輔助裝置標準化設計規范》中表明,擴大內橋備自投裝置需自適應4中運行方式:進線備自投方式(備自投方式1、備自投方式2)和橋斷路器備自投方式(備自投方式3、備自投方式4),系統運行方式靈活多變,因此對備自投裝置的保護邏輯提出了較高的要求。搭建備自投裝置動模測試平臺,模擬擴大內橋系統在各種運行方式下發生各種故障工況,對備自投裝置保護邏輯的進行全方位的考核。
基于RTDS仿真平臺可以靈活的開展繼電保護裝置動模試驗工作,由于動模試驗的可變因素較多(如:運行方式、故障點、故障類型),動模試驗次數多大上千次,工作量較大。每一次動模試驗可以劃分為三個階段:系統初始化階段、故障模擬階段及待測裝置動作階段。每次試驗均會引起系統拓撲結構發生變化,不同的運行方式下也需對系統拓撲進行調整,因此有必要設計高集成度、一鍵操作式的系統初始化切換邏輯。
1 擴大內橋備自投系統
擴大內橋接線方式系統結構如圖1所示,一次系統劃分為:系統供電區域、擴大內橋接線測試區域、均衡負荷測試區域。二次控制系統包括:故障觸發模塊、斷路器控制模塊、虛擬保護模塊及運行方式控制邏輯。其中,S1、S2分別為進線電源1和電源2;L1、L2分別為進線1和進線2;1DL、2DL分別為進線1斷路器和進線2斷路器;5DL、6DL分別為進線1、進線2的電源側斷路器;3DL、4DL分別為橋1斷路器和橋2斷路器。UL1、UL2分別為進線1、進線2的抽取電壓;U1ABC、U2ABC分別為I母、II母的三相電壓;I1、I2、I3、I4分別為進線1、進線2、橋1、橋2的電流。K1、K2、K3、K4、K5分別為進線1區內故障點、進線2區內故障點、1號主變區內故障點、2號主變區內故障點、3號主變區內故障點。擴大內橋接線有四種運行方式,備自投方式1、備自投方式2為進線備自投模式;備自投方式3、備自投方式4為橋開關備自投模式。
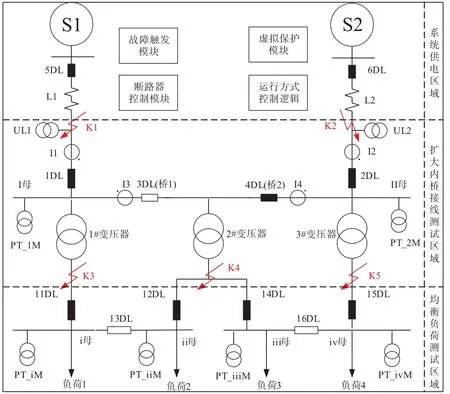
圖1 擴大內橋接線方式系統結構
四種運行方式下個斷路器狀態如表1所示。即1)備自投方式1:1DL、3DL、4DL為合閘狀態,2DL為分閘狀態。即1號進線運行,2號進線備用。2)備自投方式2:2DL、3DL、4DL為合閘狀態,1DL為分閘狀態。即2號進線運行,1號進線備用。3)備自投方式3:1DL、2DL、4DL為合閘狀態,3DL為分閘狀態。即1號進線2號進線均運行,內橋1分閘狀態。4)備自投方式4:1DL、2DL、3DL為合閘狀態,4DL為分閘狀態。即1號進線2號進線均運行,內橋2分閘狀態。

表1 各運行方式下的斷路器狀態
試驗過程中,斷路器的操作可以劃分為三類:手動分、合閘;保護裝置分、合閘;模擬斷路器偷跳分閘。試驗系統初始化階段需根據試驗項目調整運行方式,對斷路器進行狀態操作;單次試驗結束后,系統運行方式遭到破壞需進行復歸操作,因此進行一鍵式的運行方式快速切換及復歸邏輯設計是很有必要的。
2 運行方式邏輯設計
控制邏輯的核心設計思想有兩點:1)確保系統拓撲與系統運行方式相匹配的前提下,便捷的進行方式切換;2)拓撲結構與運行方式不匹配時,便捷的進行復位匹配。邏輯設計框圖如圖2所示,主要有三部分組成:斷路器狀態預設、運行方式選擇及斷路器控制邏輯融合。
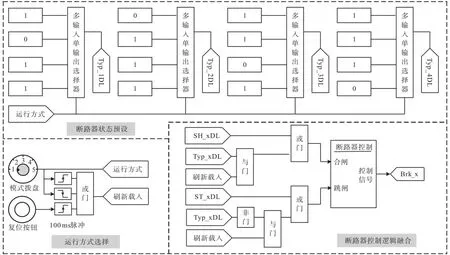
圖2 運行方式邏輯設計框圖
“運行方式選擇”為系統運行方式切換操作、復位操作的接口設計部分。“模式撥盤”可以靈活選擇運行方式,單擊“復位按鈕”觸發斷路器狀態復位操作。“運行方式”為運行方式設定值,取值范圍為1、2、3、4;“刷新載入”為復位觸發脈沖,當“運行方式”取值發生變化、復位按鈕執行操作時,產生100ms的脈沖信號。“斷路器狀態預設”參照表1采用多輸入單輸出選擇器進行運行方式和斷路器狀態的匹配,“Ty_xDL”(x=1,2,3,4)為斷路器狀態的匹配結果。“SH_xDL”、“ST_xDL”(x=1,2,3,4)分別為斷路器的手合、手跳信號,“Brkx_x”為斷路器狀態的驅動信號。斷路器控制模塊通過接收合閘、跳閘脈沖信號,實現斷路器位置狀態的分、合閘操作。“Ty_xDL”和“刷新載入”進行與邏輯,“Ty_xDL”經非邏輯后和“刷新載入”進行與邏輯操作。當“模式撥盤”完成定值設定后,刷新“運行方式”,進而刷新“Ty_xDL”,同時觸發“刷新載入”脈沖信號,驅動斷路器控制模塊。當時“復位按鈕”執行后,觸發“刷新載入”脈沖信號,且不刷新“Ty_xDL”值,驅動斷路器控制模塊,實現了兩點核心設計思想。
3 仿真算例
在RTDS仿真系統中搭建所設計的邏輯,設計2個典型仿真算例進行試驗,對邏輯中關鍵變量錄波分析,進行邏輯功能驗證。仿真算例1:系統運行方式切換。擴大內橋備自投系統的初始運行方式為備自投方式1,操作模式撥盤,切換至備自投方式2運行狀態,圖3為仿真算例錄波圖。0s時刻,系統運行方式設定值發生變化:運行方式由1階躍至2,“Ty_xDL”(x=1,2,3,4)刷新數值。刷新載入產生100ms的脈沖信號,驅動斷路器控制模塊。“WZ_xDL”(x=1,2,3,4)為斷路器的實際狀態,分析錄波圖可知,2DL由分閘狀態切換至合閘狀態,相對于Ty_2DL有60ms的延遲,該延遲模擬了實際斷路器執行機構的延時。
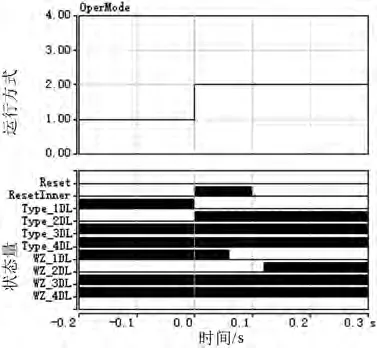
圖3 運行方式切換
仿真算例2:拓撲結構復歸操作。模擬系統運行方式為備自投方式2時,由于其他操作導致斷路器狀態與運行方式不匹配,該算例中零xDL(x=1,2,3,4)斷路器均處于分閘狀態,執行復歸操作,令運行方式與系統拓撲結構相匹配。圖4為仿真算例錄波圖。“Ty_xDL”(x=1,2,3,4)數值正確匹配備自投方式2,0s時刻,操作復位按鈕(Rest),觸發“刷新載入”產生100ms的脈沖信號,重新將“Ty_xDL”(x=1,2,3,4)數值錄入斷路器控制模塊,“WZ_xDL”(x=1,2,3,4)刷新,各斷路器位置正確匹配系統設定的運行方式。
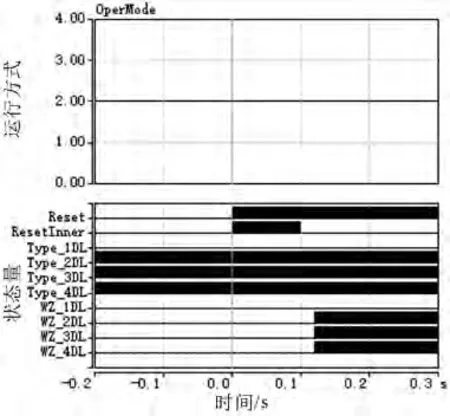
圖4 拓撲結構復歸
仿真算例結果表明,該控制邏輯具備設計功能:1)確保系統拓撲與系統運行方式相匹配的前提下,便捷的進行方式切換;2)拓撲結構與運行方式不匹配時,便捷的進行復位匹配。
4 結語
擴大內橋備自投裝置動模試驗過程中,涉及多次的運行方式轉換、系統拓撲結構重構,逐次手動操作試驗前狀態準備、試驗后狀態復歸,工作量大、效率低下。以系統運行方式快捷切換、系統快捷復歸位設計目標,進行了斷路器控制邏輯開發。仿真驗證表明,所設計的控制邏輯滿足試驗需求,能夠便捷的實現系統拓撲結構與運行方式相匹配、系統運行方式自由切換、系統拓撲結構復位匹配。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32