基于神經網絡模糊控制的單目無人機視覺避障方法研究
2020-07-01 06:55:22張曉軍
機械與電子 2020年6期
張曉軍
(廣東工業大學華立學院,廣東 廣州 511325)
0 引言
單目無人機巡視現場多是復雜場景,對無人機巡查工作的要求更為苛刻。無人機在控制自身飛行的同時需完成在線檢查測驗及躲避障礙物,由于操作內容過多,導致無人機在規避電線塔桿和冗余線路時存在避障問題,為檢查改修帶來困難。針對單目無人機感應器的類型、屬性、規避障礙物數據等特征,結合神經網絡和模糊控制原理對單目無人機視覺避障方法進行優化和改善[1]。對航行軌跡重新設計規劃,得到實際的飛行檢驗,通過進一步實驗測試說明該技術對單目無人機規避塔桿障礙物具有明顯優勢。
1 單目無人機視覺避障方法
1.1 單目無人機巡檢路徑及障礙物檢測
無人機規避障礙物的后臺系統主要分為2部分,即規避子系統和路徑分析子系統。在無人機機身上的是規避子系統,在無人機計算處理器里的是路徑分析子系統。2個系統通過信息輸送交換有用信息,實現信息部分連接。其中,規避子系統被劃分為信息通訊模塊和規避判定模塊。規避系統有2個方面要求:識別障礙和規避途徑的選擇識別[2]。采用多感應器結合技術巡查障礙物,通過嵌入式后臺操控方案規劃,須將系統軟件和硬件相融合。設計算法前檢查系統硬件的計算能力能否支撐平臺要求。并檢查信息傳送的匹配度,在路徑傳送過程中,進行二次編程和解電碼時,需檢查芯片單位時間內獲得的峰值幀數。對系統硬件規劃時,要考慮信息搜集正確與否、技術的運行順序、攝像機鏡頭的類型選擇、停留位置,以及信息流的傳輸和丟失所耗費的時間成本[3]。基于此,根據無人機內部智能芯片性能判定規避路徑,通過對無人機自身性能選擇合適的障礙物規避方案。穩定飛行路徑無人機規避障礙物方法的關鍵是路徑分析系統,路徑分析系統依賴無人機遠程操作端口在計算機后臺作業的平穩性。具體無人機規避功能模塊結構設置如圖1所示。
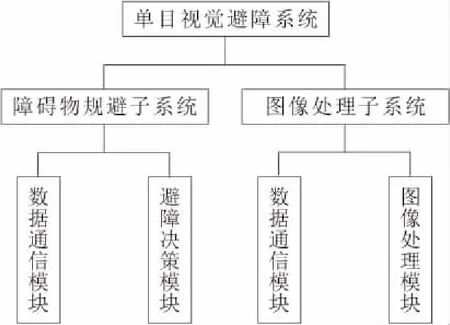
圖1 無人機規避功能模塊
根據圖1設計的模塊,控制單目無人機視覺避障系統穩定的運行軌跡,判斷軌跡運行屬性及障礙點的所在位置。選擇障礙點本質屬性點的穩定程度,一定條件下影響了單目無人機視覺避障的穩定性和準確性,尤其是視覺避障的正確度[4]。為提高視覺避障準確度,選擇SIFT(scale-invariant feature transform)算法作為優化路徑避障方法,采集和分析路徑特征。標記并選擇無人機巡檢路徑,將無人機巡檢路徑上等待搜集的障礙物特征樣本點和初始巡檢路徑的參考點進行對比。比較巡檢路徑上尺寸不同的28個節點,當被檢查點不小于28個相鄰節點時,即開始關于無人機航行路徑障礙特征點的認定和判斷,具體如圖2所示。
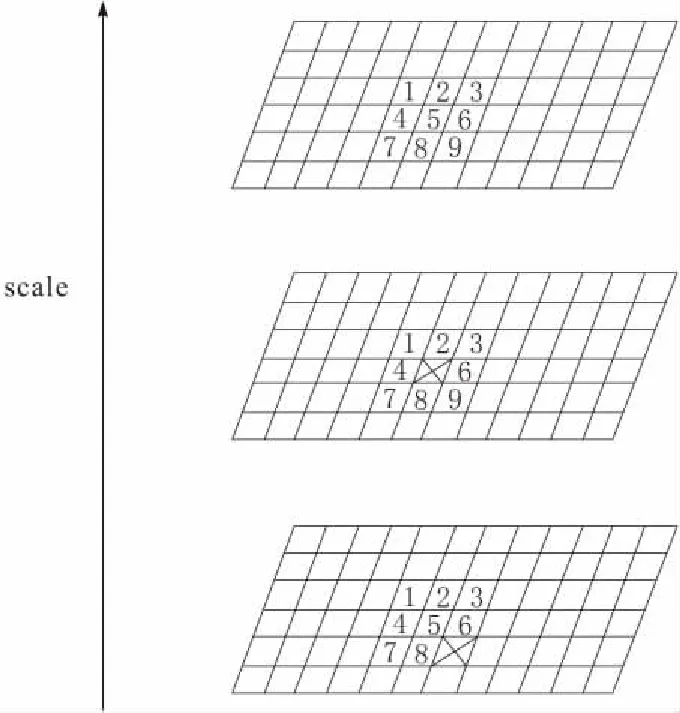
圖2 無人機航行路徑障礙特征識別原理
基于障礙特征識別原理,可有效對無人機巡檢路線中存在的障礙物坐標點進行精準檢測和定位。定位無人機航行路徑障礙坐標點,并設計該障礙的合理規避方案,確定特征點的大致方向。利用SIFT算法,平均劃分障礙物位置特征點及大致方向的周圍區域,并對劃分的72個防控圖形進行有效規避路線的數據選擇。統計72個防控圖形的梯度以及路線選取的頻率直方數值,選擇效果最佳的路線方向作為規避路線。若規避路線的方向超過最大梯度80%,則記為規避輔助方向[5]。與此同時,利用SURF(speeded up robust features)算法,判斷無人機巡檢的規避角度。若其角度為大于60%的扇形角度,則易出現較大的路線偏移現象,需對峰值角度和路線方向進行二次選擇[6]。如果目標避障的扇形角度在60%以內,則無人機的航行距離小于安全距離,就會因規避效果不佳而發生碰撞。因此,需要進一步對無人機巡檢路徑障礙規避方案進行合理選擇。
1.2 無人機巡檢路徑障礙規避方案
依據單目無人機巡檢路徑的選擇和障礙物檢測的結果,進一步對無人機巡檢路徑障礙規避方案進行篩選。為了有效避免無人機的碰撞及路線偏移,對無人機巡檢路線的避障目標點和安全避障距離進行設計和規范。通過控制目標距離,操控無人機飛行序列,將避免障礙物避障方法進行細分,具體方法如下所述。
a.合作型避免型。在無人機內部路徑管理模塊中,輸入和輸出路徑對障礙規避變量進行模糊描述。根據采集到的路線障礙物坐標變量特征,將無人機航行路徑特征數據分成不同等級。如果無人機巡檢路線的數據變量特征數值較小,那么無人機航行過程中潛在的障礙避讓變量相對較少,導致輸入輸出變量的描述也相對粗糙[7]。在進行規避設置過程中,若檢測到的無人機路徑障礙物數量較多,那么路線變量數值就會相對較多,對于路徑中障礙變量的描述極為復雜[8]。因此,應適當選擇無人機避讓數據進行描述,即對無人機規避路線的輸入變量描述為:遠(FAR),中(MIDDLE),近(NEAR)。
b.自主型避讓型。對較大角度的無人機避讓路徑進行規劃,將2個目標的某個單方面作為控制對象,對無人機機身的飛行路徑或軌跡序列進行操控,使得目標的最小距離大于安全距離。基于此,進一步對輸出變量進行描述,具體為:大(LARGE),中(MEDIUN),小(SMALL)。
展示兩無人機到碰撞點位置變化原理以及障礙主體,通過攝像機搜集10個路徑圖像,完成對巡檢路徑的正向標記[9]。由于避障過程中單個路徑障礙的位置計算與外界路線的實際參數存在區別,因此需要羅列出外界路徑避讓參數,具體參數標定數值如表1所示。
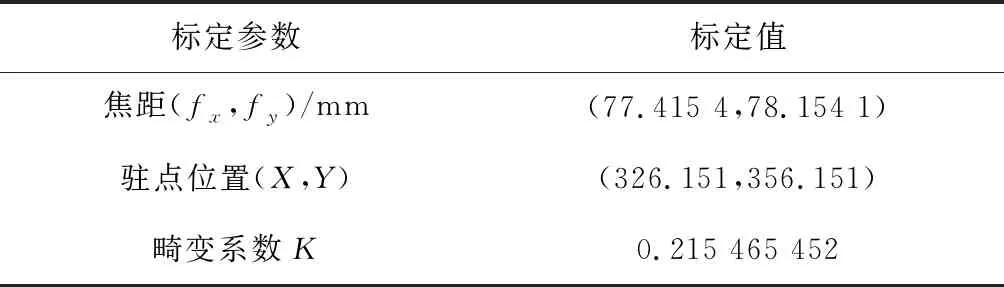
表1 參數標定數值
根據參數標定的數值設計規范及單目無人機視覺避障高斯函數的尺度區間算法,計算避讓尺度區間,具體為
L(x,y,z)=G(x,y,z)×I(x,y)
(1)
G(x,y,z)為單目無人機巡檢路線的高斯曲線坐標;I(x,y)為對應的障礙物坐標區域[10]。對無人機到碰撞點位置變化數值進行采集和規范,具體如圖3所示。
通過圖3可知,考慮目標四周安全區域的多種情況,在上述無人機航行的空間區域范圍內,將潛在碰撞路徑用實線表示[11]。當無人機和目標路線之間的距離越來越近時,則無人機檢測路線距離障礙區域達到臨界值,使得無人機路徑轉換過程中,其機身行動會發生變化。因此,進一步對目標路徑內的最小距離進行計算,采用圖3兩無人機到碰撞點位置變化原理,標記障礙物,并規范障礙物碰撞避讓路線,以實現對無人機巡檢路徑自主規避障礙的平穩操作[12]。基于上述算法,可有效實現對無人機巡檢路徑障礙規避方案的合理規劃。
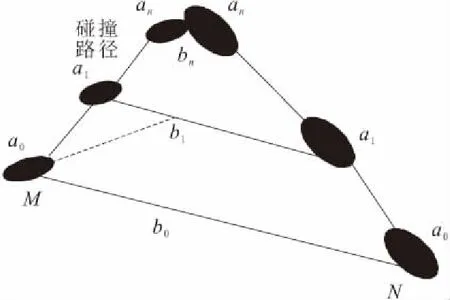
圖3 無人機到碰撞點位置變化
1.3 單目無人機視覺避障的實現
結合模糊控制原理規劃單目無人機視覺避障方法。針對坐標系尺寸空間數值篩選無人機巡檢路徑方案樣本,以組為單位,對無人機航行的不同高度和角度進行最優路線的檢測和判斷。計算臨近2個不同角度的轉移路徑的差異數值,根據計算結果采集不同路徑方案中產生的不同尺寸空間和繞行數據,選擇耗時最低、繞行最少的路徑數據。由于路徑的坐標體系是以路徑為基礎建立的,因此以路徑像素為單位存儲的數組越大,路徑分辨能力越好。坐標原點處數組用初始點[0,0]表示,其第1行為坐標體系橫軸,第1列為坐標體系縱軸,如圖4所示。
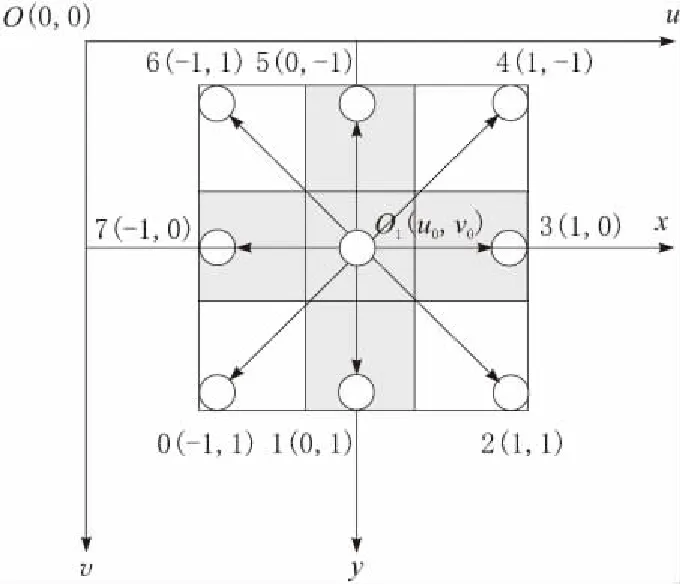
圖4 無人機巡檢路徑自主規避坐標
根據坐標數值原理,緩慢平移無人機巡檢路徑坐標體系的初始點,獲取相應的無人機巡檢路徑坐標位置。將巡檢單位定為毫米,對路徑中待規避的物理點障礙點與路徑之間的對應關系進行規范計算,具體為
(2)
X為坐標系橫軸方向上障礙物分布距離;Y為坐標系縱軸方向上障礙物分布距離;D為巡檢過程中待轉變數值。
設無人機的飛行運行速度為z。對路徑中的實際障礙物避讓路徑進行預測和操控處理,若在避讓過程中產生的避讓速度為k0,在T時刻的運行速度為k1,則進一步根據檢測到的路線方案進行模擬預測,計算無人機運行速度的改變數值,具體算法為
(3)
基于式(3),進一步對待檢測路徑進行預測,隨機采集S時刻的無人機規避約值,記為h,計算無人機避讓減速數值,具體算法為

(4)
依據式(4),結合一階和二階增量預測原理進行最佳路徑的選取,在轉速隨時間近似線性變化的情況下,最大程度上減少無人機航行路線的障礙物避讓誤差數值。并記錄路徑中非線性轉速變化數值隨時間變化的情況,獲得被測無人機在特定時間段T內的周期個數為n時的控制數值K,如圖5所示。
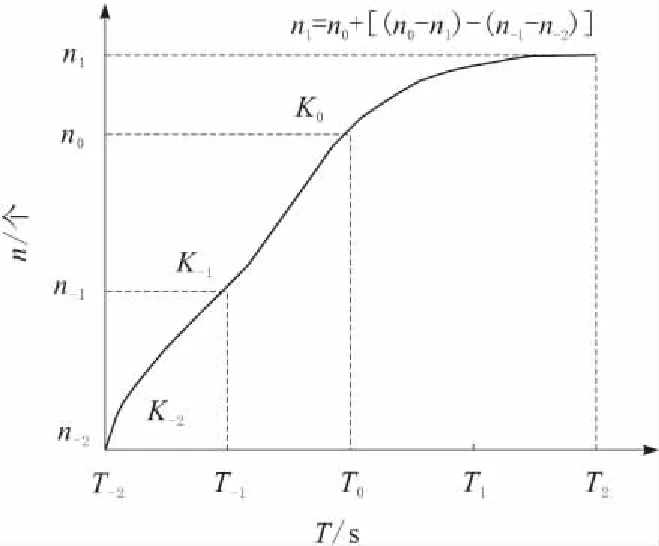
圖5 無人機巡檢路徑轉速控制數值
根據無人機巡檢路徑轉速控制數值,可有效實現對路徑誤差的控制和管理。為保障無人機視覺避讓效果,進一步對單目無人機視覺避障步驟進行優化,其流程如圖6所示。
基于圖6步驟,可有效實現單目無人機航行路線中,對潛在障礙物進行快速有效的避讓處理,選取無人機的最優航行路線,提高無人機視覺避障的安全性和有效性。
2 實驗結果與分析
為驗證基于神經網絡模糊控制的單目無人機視覺避障方法的有效性,進行對比檢測,為保障檢測結果的可靠性,對實驗環境進行統一規范設置。
2.1 實驗環境
在實驗開始前設置標記模板,標記模板均使用大小統一的黑白模塊,模塊尺寸為18 mm×18 mm,以模塊為單位,標記模塊的尺寸為8×8。采用分辨率為680×480像素的攝像機,從不同的飛行角度搜集10個路徑作為基礎算法路徑。安置飛控在運行后臺上,將電池蓄電后等待無人機安檢。編寫無人機航行軌跡方案,其中2個航行軌跡節點1和節點2分別設置到塔桿的2個側邊。操控無人機到塔桿周圍,對無人機慢速運行的閾值距離設為14 m,規避障礙的閾值距離為8 m。當毫米電波雷達應用視覺感應模塊檢查障礙物時會自動執行規避計劃,重復以上操作6次并記錄數據。
2.2 無人機避障有效率對比
基于上述實驗環境,對比基于迭代重組和人工勢場相結合的避障方法與基于神經網絡模糊控制的單目無人機視覺避障方法的避障有效性,記錄相應的檢測結果,如圖7所示。
分析實驗結果可知,基于神經網絡模糊控制的單目無人機視覺避障方法相對于傳統方法而言,有更高的適用性,在無人機已知障礙物位置和目標地點的情況下,可以準確地規避障礙物并且分析規避路徑。同時該算法可以在復雜的作業條件下,仍可以完成規避和路徑識別任務。提高了無人機避障的準確度,保障無人機航行安全,因此該算法可以被廣泛用于無人機的規避障礙物研究中。
3 結束語
為改善單目視覺無人機的航行安全性能,提出基于神經網絡模糊控制的單目無人機視覺避障方法。運用SURF算法判斷無人機巡檢的規避角度,優化無人機規避功能模塊的功能。結合模糊控制原理規劃單目無人機視覺避障路徑,計算避讓路線數值,選擇最優避障路線,提高無人機視覺避障的安全性和有效性。比較實驗表明,本文所研究方法的避讓時間比傳統方法的短,避讓有效性最高可達90%,改進了單目無人機視覺避障的準確性。