基于卷對卷系統(tǒng)的張力滑模變結(jié)構(gòu)控制
2020-07-04 02:27:37楊航王朝立
智能計(jì)算機(jī)與應(yīng)用 2020年3期
楊航 王朝立

摘要:張力控制技術(shù)在鋰電池生產(chǎn)和軋鋼等卷對卷設(shè)備運(yùn)行中顯得十分重要,是很多控制設(shè)備的基礎(chǔ)技術(shù)之一,其性能直接影響產(chǎn)品的質(zhì)量和生產(chǎn)的效率。針對張力控制系統(tǒng)存在的非線性、時(shí)變等問題,通過研究張力控制系統(tǒng)的動態(tài)特性,建立了卷對卷系統(tǒng)張力的數(shù)學(xué)模型。選擇了滑模變結(jié)構(gòu)控制策略,結(jié)合變速趨近律和指數(shù)趨近律的方法設(shè)計(jì)了一種新的控制律。削弱了采用一般的滑模變結(jié)構(gòu)控制方法難以避免的系統(tǒng)抖振問題,提高了目標(biāo)跟蹤精度,有效減少了張力誤差。以二軸張力控制系統(tǒng)為研究對象進(jìn)行仿真分析,在Matlab平臺上建立張力控制系統(tǒng)的數(shù)學(xué)仿真模型,分析了該系統(tǒng)的響應(yīng)特性和跟蹤性能。仿真結(jié)果表明系統(tǒng)可以快速準(zhǔn)確地跟蹤方波與正弦信號,并能有效抑制簡單滑模變結(jié)構(gòu)控制的抖振問題,驗(yàn)證了所設(shè)計(jì)的控制方法的有效性。
關(guān)鍵詞: 卷對卷系統(tǒng); 張力控制; 滑模變結(jié)構(gòu)控制; 計(jì)算機(jī)仿真
【Abstract】 Tension control technology is very important in the operation of roll-to-roll equipment. It is one of the basic technologies of many control equipment. Its performance directly affects the quality of products and the efficiency of production. Aiming at the problems of non-linearity and time-varying in tension control system, the mathematical model of tension in winding system is established by studying the dynamic characteristics of tension control system. The sliding mode variable structure control strategy is selected, and a new control law is designed by combining variable speed reaching law and exponential reaching law. It reduces the chattering problem which is difficult to avoid by using the general sliding mode variable structure control method, and improves the tracking accuracy of the target. The two-axis tension control system is taken as the research object for simulation analysis. The mathematical simulation model of tension control system is established on Matlab, and the response characteristics and tracking performance of the system are analyzed. The results show that the system can track square wave and sinusoidal signal quickly and accurately, and can effectively suppress the chattering problem of simple sliding mode variable structure control, which verifies the effectiveness of the proposed control method.
【Key words】 ?roll-to-roll systems; tension control; sliding mode variable structure control; computer simulation
0 引 言
張力控制廣泛運(yùn)用于鋰電池生產(chǎn)、軋鋼、造紙和紡織等工業(yè)生產(chǎn)中,各類卷材中的張力值直接影響產(chǎn)品的質(zhì)量。在卷繞系統(tǒng)中,卷材的張力波動對卷繞過程影響較大,因此,張力控制的核心問題是在卷繞的過程中使卷材中的張力保持恒定[1]。傳統(tǒng)的PID控制由于系統(tǒng)結(jié)構(gòu)簡單,控制參數(shù)便于整定等優(yōu)點(diǎn),廣泛運(yùn)用于實(shí)際的張力控制系統(tǒng)之中。但是,卷對卷張力控制系統(tǒng)具有較強(qiáng)的時(shí)變性,同時(shí)外部干擾具有較強(qiáng)的魯棒性,是一個(gè)復(fù)雜的非線性系統(tǒng)[2-4]。由此,傳統(tǒng)PID控制方法難以實(shí)現(xiàn)高精度的張力控制,不能滿足實(shí)際的生產(chǎn)需要。
滑模變結(jié)構(gòu)控制是一種特殊的非線性控制方法,主要針對復(fù)雜的非線性系統(tǒng),表現(xiàn)為控制的不連續(xù)性,系統(tǒng)根據(jù)當(dāng)前的狀態(tài)有目的地變化,可以迫使系統(tǒng)沿著預(yù)設(shè)的“滑動面”的狀態(tài)軌跡運(yùn)動[5-7]。這種滑動的狀態(tài)是根據(jù)實(shí)際控制需要進(jìn)行設(shè)計(jì),同時(shí)和系統(tǒng)的參數(shù)和擾動不相關(guān)。在實(shí)際控制中,變結(jié)構(gòu)控制在滑動狀態(tài)下存在高頻抖振,這種抖振會使系統(tǒng)的超調(diào)量過大,影響控制的精度和系統(tǒng)的動態(tài)性能,同時(shí)系統(tǒng)中的高頻未建模的抖振會使系統(tǒng)產(chǎn)生振蕩或失穩(wěn)[8-10]。因此,消除抖振是滑模變結(jié)構(gòu)研究的一個(gè)不可忽視的問題。李琳等人[11]設(shè)計(jì)了基于變速趨近律的滑模控制器,但是簡單的滑模控制無法完全避免抖振現(xiàn)象,在實(shí)際的卷繞過程中效果不理想。中國工程院院士高為炳在變結(jié)構(gòu)控制理論研究中首次提出了趨近律、品質(zhì)控制、切換模式分類等新概念,提出了一種消除抖振的方法[12]。國外一些學(xué)者提出了一種新的指數(shù)趨近律,使系統(tǒng)的狀態(tài)點(diǎn)沿滑模面滑動的過程中控制增益逐漸減小,有效地減小了抖振[6-7,13-15]。游林儒等人[16]通過鋰電池卷繞系統(tǒng)中的方形卷針的角速度辨識模型設(shè)計(jì)了恒角速度的張力控制策略,但是由于簡化了系統(tǒng)模型,使得張力控制存在較大的誤差。
本文針對張力系統(tǒng)的非線性,采用滑模變結(jié)構(gòu)控制,設(shè)計(jì)了一種新的趨近律,使控制狀態(tài)在有限時(shí)間到達(dá)滑模面并削弱的系統(tǒng)的抖振,提高系統(tǒng)的控制性能。
1 卷對卷系統(tǒng)的數(shù)學(xué)模型
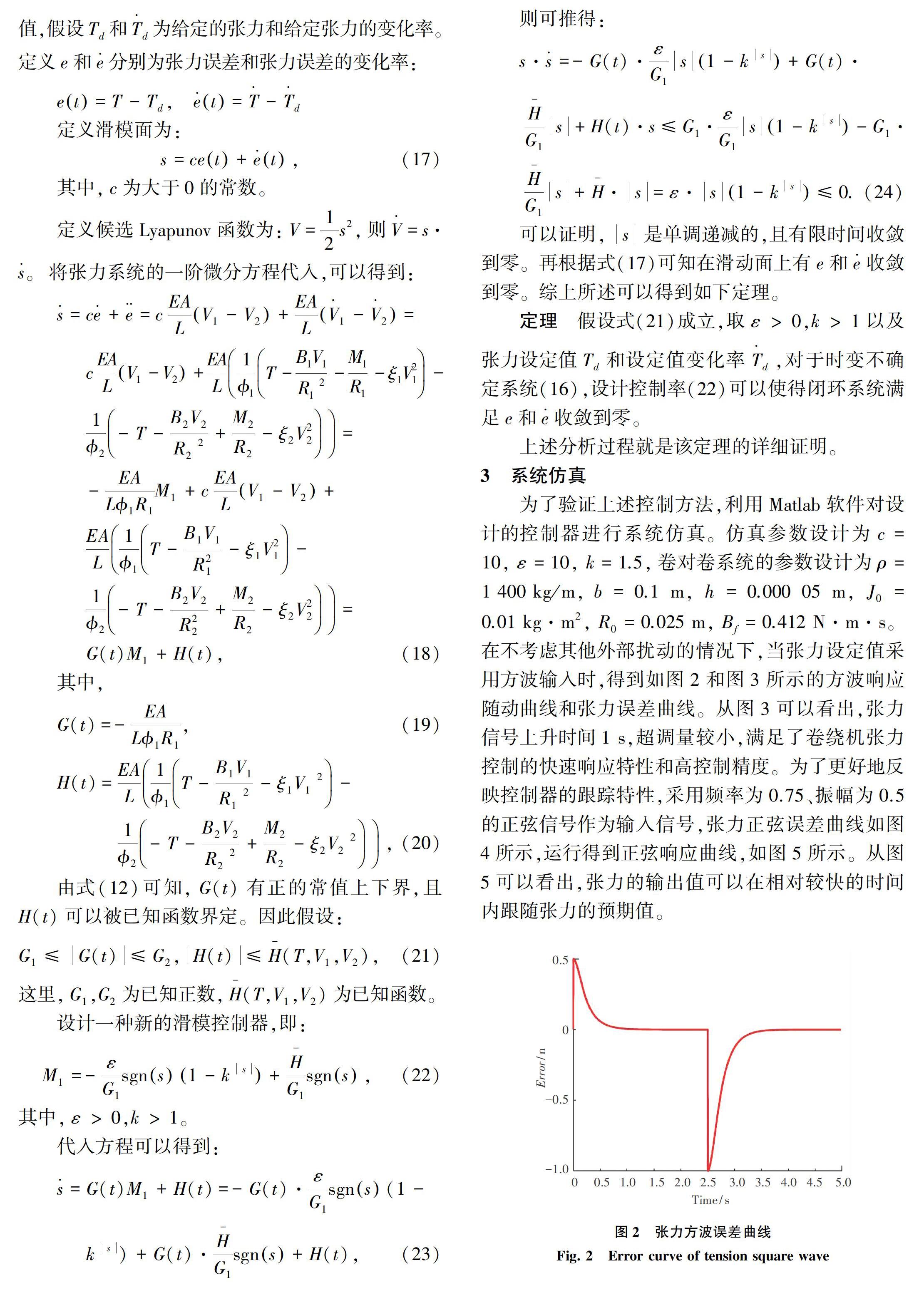
卷對卷系統(tǒng)的張力控制系統(tǒng)簡圖如圖1所示。該系統(tǒng)由伺服電機(jī)、張力傳感器和張力控制器組成。可以看出,張力系統(tǒng)的工作原理是通過張力檢測器實(shí)時(shí)檢測張力的實(shí)際輸出值,并且與給定的目標(biāo)張力值進(jìn)行實(shí)時(shí)比較,通過設(shè)計(jì)好的張力控制器調(diào)節(jié)電機(jī)的輸出轉(zhuǎn)矩,從而控制系統(tǒng)張力的穩(wěn)定輸出。系統(tǒng)的輸出為放卷電機(jī)的轉(zhuǎn)矩M1和M2,系統(tǒng)的輸入量為張力檢測器的輸出值T和彈性物體在滾軸的圓周切線方向的速度V1和V2。
4 結(jié)束語
張力控制是卷對卷系統(tǒng)的重要組成部分,以鋰電池卷繞機(jī)作為研究對象, 建立了一個(gè)涵蓋多種擾動因素的放卷系統(tǒng)張力動力學(xué)模型。張力控制是卷對卷系統(tǒng)的重要組成部分,本文提出了一種用于時(shí)變不確定放卷系統(tǒng)張力的滑模變結(jié)構(gòu)控制器設(shè)計(jì)方法。 針對傳統(tǒng)滑模變結(jié)構(gòu)控制中存在的高頻抖振問題,采用一種新的趨近律的方法設(shè)計(jì)滑模變結(jié)構(gòu)控制器,不僅可以使系統(tǒng)在有限時(shí)間內(nèi)到達(dá)畫面,還可以有效地抑制高頻抖振。運(yùn)用李雅普諾夫穩(wěn)定性理論,對整個(gè)系統(tǒng)進(jìn)行了穩(wěn)定性分析。通過仿真實(shí)驗(yàn)表明,在放卷張力控制系統(tǒng)中,滑模變結(jié)構(gòu)控制具有響應(yīng)速度快,控制精度較高的動態(tài)特性。同時(shí)所設(shè)計(jì)的控制方法具有較好的魯棒性和跟蹤性能。仿真結(jié)果也驗(yàn)證了所設(shè)計(jì)方法的有效性。
參考文獻(xiàn)
[1] 楊梅,續(xù)明進(jìn). 基于MATLAB的卷筒紙印刷機(jī)張力控制系統(tǒng)的建模與仿真[J]. 包裝工程,2011,32(7) :22.
[2]吳東蘇,閔松,萬淑蕓,等. 基于滑模變結(jié)構(gòu)控制的高精度交流伺服系統(tǒng)的設(shè)計(jì)與仿真[J]. 計(jì)算技術(shù)與自動化, 2001, 20(3):23.
[3]彭書華,李華德,蘇中. 非線性摩擦干擾下的電動舵機(jī)滑模變結(jié)構(gòu)控制[J]. 信息與控制,2008, 37(5):637.
[4]劉金琨,孫富春. 滑模變結(jié)構(gòu)控制理論及其算法研究與進(jìn)展[J]. 控制理論與應(yīng)用,2007, 24(3):407.
[5]LIU Le, FANG Yiming, LI Xiaogang, et al. Tensiometer-free control for a speed and tension system of reversible cold strip mill based on Hamilton theory[J]. Acta Automatica Sinica, 2015, 41(1):165.
[6]HOU Hailiang, NIAN Xiaohong, XIONG Hongyun, et al. Robust decentralized coordinated control of a multimotor Web-winding system[J].IEEE Transactions on Control Systems Technology, 2016, 24(4):1495.
[7]VALENZUELA M A, BENTLEY J M, LORENZ R D. Sensorless tension control in paper machines[J]. IEEE Transactions on Industry Applications , 2003, 39(2):294.
[8]孟彥京,周斌,劉圓圓. 基于模糊自適應(yīng)PID算法的復(fù)卷機(jī)退紙輥張力控制[J]. 中國造紙, 2011, 30(2):41.
[9]何金保,郭帥,何永義,等. 基于遺傳優(yōu)化的張力模糊控制[J].控制理論與應(yīng)用,2009,26(3):243.
[10]李偉,王友權(quán),董繼先,等. 基于自調(diào)整內(nèi)模控制法的復(fù)卷機(jī)張力控制的設(shè)計(jì)與仿真[J]. 包裝工程,2016, 37(11): 149.
[11]李琳,林炯輝,鄒焱飚. 基于滑模變結(jié)構(gòu)的張力控制系統(tǒng)設(shè)計(jì)[J]. 機(jī)械設(shè)計(jì)與制造, 2016(4):175.
[12]劉金琨. 滑模變結(jié)構(gòu)控制 MATLAB仿真: 基本理論與設(shè)計(jì)方法[M]. 3版. 北京: 清華大學(xué)出版社,2015.
[13]孫洋,黃民,李啟光. 基于慣性濾波的開卷機(jī)卷徑計(jì)算與MATLAB仿真[J]. 機(jī)械工程師, 2015(9):18.
[14]SHI Hongmei, YU Zujun. Design of PMSM position servo system based on fuzzy adaptive PI control[J]. Advanced Materials Research, 2013, 706-708(1):737.
[15]HAN Yu, LIU Le, FANG Yiming, et al. Backstepping control for the speed and tension system of reversible cold strip rolling mill based on command filter[C]// Proceedings of the 36th Chinese Control Conference. Dalian, China:Control theory Committee of China Automation Society, 2017:1016.
[16]游林儒,楊秀春. 基于鋰電池卷繞機(jī)張力控制系統(tǒng)[J]. 控制工程,2011,18(6): 890.
[17]王虎符,王文格. 阿基米德螺線的插補(bǔ)算法研究[J]. 組合機(jī)床與自動化加工技術(shù),1996(1):8.
[18]陳毅輝. 高精度卷繞機(jī)張力控制系統(tǒng)的研究[D]. 鎮(zhèn)江:江蘇大學(xué), 2006.
