軌道車輛弓網系統主動控制研究
2020-07-04 02:27:37蔣蘇杰楊儉楊瀝孔令強周群馮婷立
智能計算機與應用 2020年3期
關鍵詞:仿真
蔣蘇杰 楊儉 楊瀝 孔令強 周群 馮婷立
摘要:列車受電弓與接觸網間的接觸力穩定直接影響列車的安全運行。對列車弓網系統進行主動控制是保證列車運行時弓網接觸力穩定的有效方法。建立受電弓-接觸網系統動力學模型,分別采用PID算法及模糊滑模控制對弓網系統進行控制。在此基礎上提出一種模糊滑模自適應PID控制器。分析對比3種控制的效果,從而為研究高效智能的弓網主動控制系統提供科學理論依據。
關鍵詞: 受電弓; 主動控制; 控制算法; 仿真
【Abstract】 The stable contact force between the train pantograph and the contact network is one of the main factors affecting the safe operation of the train. Active control of the train bow network system is an effective method to ensure the stability of the bow network contact force when the train is running. The dynamic model of the pantograph-contact network system is established, and the PID system and fuzzy synovial membrane control are used to control the bow network system. Based on this, a fuzzy synaptic adaptive PID controller is proposed. the effects of the three controls are analyzed and compared, so as to provide a scientific theoretical basis for the study of efficient and intelligent bow network active control system.
【Key words】 ?pantograph; active control; control algorithm; simulation
0 引 言
弓網關系直接影響列車運行。在對弓網關系評價中,弓網間的接觸力是重要依據。弓網間接觸力過大或過小都會直接影響著列車的運行。對受電弓進行主動控制是保持弓網接觸力穩定的有效方法。
本文提出對弓網系統進行PID控制、模糊滑模控制的研究方法。在此基礎上又提出一種模糊滑模自適應PID控制器,對受電弓進行主動控制。
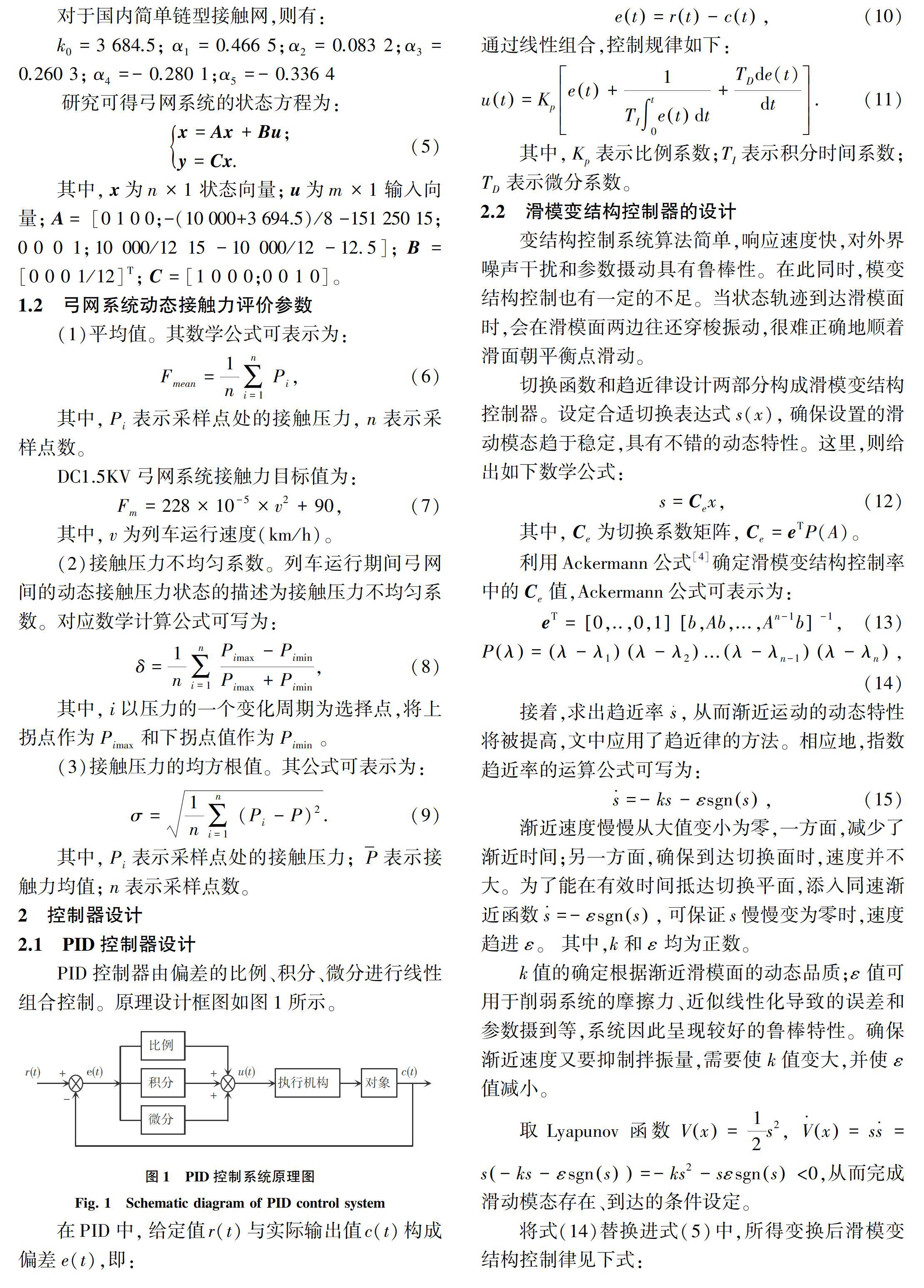
1 弓網系統建模
1.1 弓網系統建模機理研究
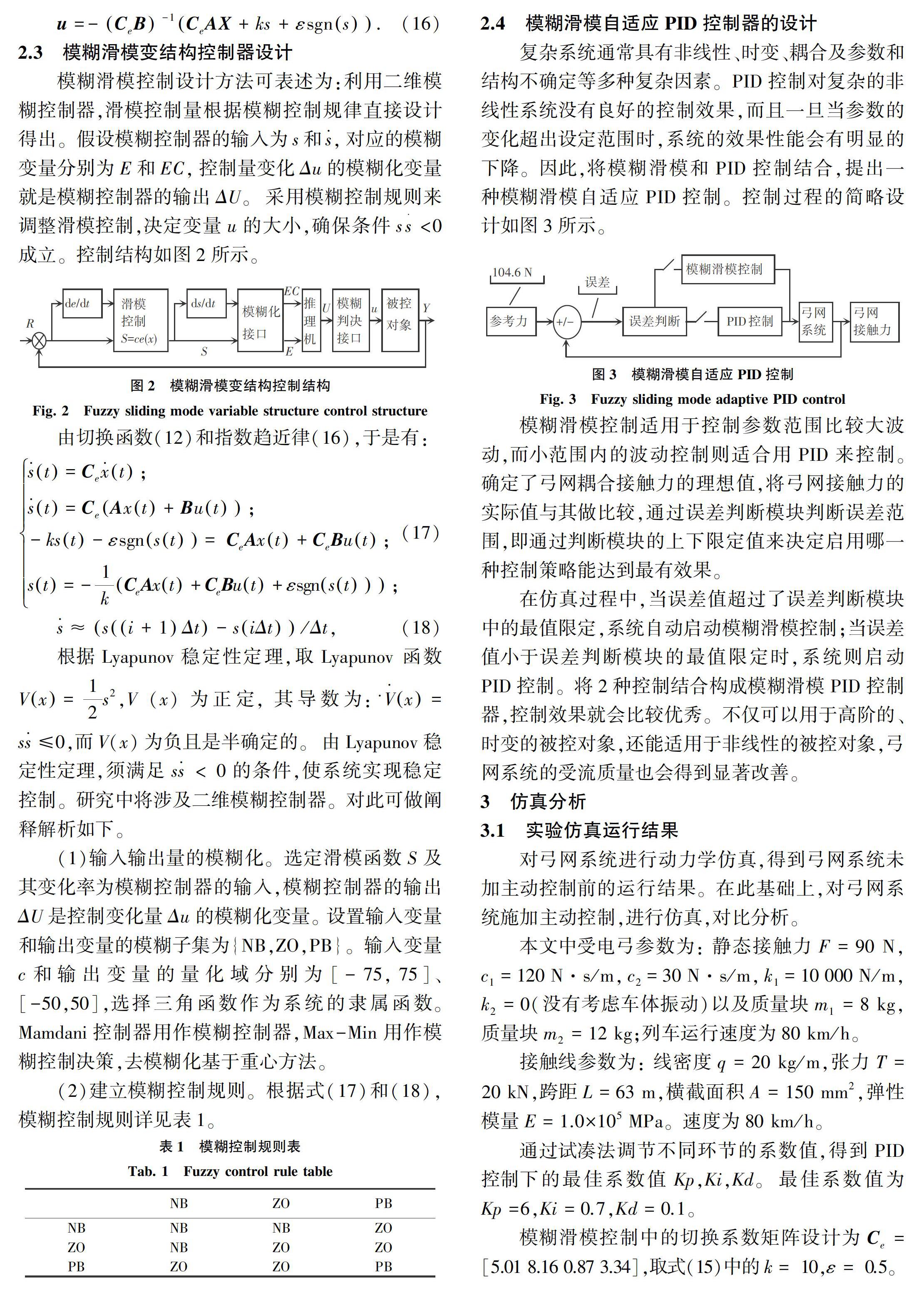
2.4 模糊滑模自適應PID控制器的設計
復雜系統通常具有非線性、時變、耦合及參數和結構不確定等多種復雜因素。PID控制對復雜的非線性系統沒有良好的控制效果,而且一旦當參數的變化超出設定范圍時,系統的效果性能會有明顯的下降。因此,將模糊滑模和PID控制結合,提出一種模糊滑模自適應PID控制。控制過程的簡略設計如圖3所示。
模糊滑模控制適用于控制參數范圍比較大波動,而小范圍內的波動控制則適合用PID來控制。確定了弓網耦合接觸力的理想值,將弓網接觸力的實際值與其做比較,通過誤差判斷模塊判斷誤差范圍,即通過判斷模塊的上下限定值來決定啟用哪一種控制策略能達到最有效果。
在仿真過程中,當誤差值超過了誤差判斷模塊中的最值限定,系統自動啟動模糊滑模控制;當誤差值小于誤差判斷模塊的最值限定時,系統則啟動PID控制。將2種控制結合構成模糊滑模PID控制器,控制效果就會比較優秀。不僅可以用于高階的、時變的被控對象,還能適用于非線性的被控對象,弓網系統的受流質量也會得到顯著改善。
3 仿真分析
3.1 實驗仿真運行結果
對弓網系統進行動力學仿真,得到弓網系統未加主動控制前的運行結果。在此基礎上,對弓網系統施加主動控制,進行仿真,對比分析。
本文中受電弓參數為: 靜態接觸力F=90 N,c1=120 N·s/m,c2=30 N·s/m,k1=10 000 N/m,k2=0(沒有考慮車體振動)以及質量塊m1=8 kg,質量塊m2=12 kg;列車運行速度為80 km/h。
接觸線參數為: 線密度q=20 kg/m,張力T=20 kN,跨距L=63 m,橫截面積A=150 mm2,彈性模量E=1.0×105 MPa。速度為80 km/h。
通過試湊法調節不同環節的系數值,得到PID控制下的最佳系數值Kp,Ki,Kd。最佳系數值為Kp=6,Ki=0.7,Kd=0.1。
模糊滑模控制中的切換系數矩陣設計為[WT5HX]C[WT5BX]e=[5.01 8.16 0.87 3.34],取式(15)中的k=10,ε=0.5。
由此可得PID控制、模糊滑模控制與模糊滑模自適應PID控制仿真結果如圖4~圖8 所示。
3.2 仿真結果分析與總結
當列車運行速度為80 km/h時,可得仿真數據分析結果見表2。
由表2可得,弓網模型在經過PID、模糊滑模控制、模糊滑模自適應PID下,接觸力評價參數均得到有效提升,接觸力更加穩定。研究可得剖析論述如下。
(1)對系統進行主動控制后,弓和網之間動態接觸力狀況得到明顯改觀。從仿真結果來看,接觸力平均值情況得到改善,原系統的接觸力均值為83.5 N,經過PID、模糊滑模控制、模糊滑模自適應PID三種主動控制增大為85.1 N,88.8 N,93.3 N,更加接近于該速度下的經驗值104.6 N;最小值得到有效提高,從控制前的41.9 N增加到44.2 N、49.2 N、56.9 N;最大值得到有效降低,從179.0 N下降到147.3 N、139.7 N、127.7N。接觸力均方根和接觸力不均勻系數也得到了有效降低。均方根從33.5下降到26.2、25.9、18.7,下降率分別為34.5%、33.3%、38.3%;不均勻系數從20.9下降到13.3、11.9、12.3,下降率分別為49.8%、65.5%、66.8%。
(2)在3種主動控制下,從各種評價指標上來看,模糊滑模的控制效果要優于PID控制,模糊滑模PID比模糊滑模控制具有更好的控制效果。3種主動控制方法都有效地改善了弓網間接觸力的波動。
4 結束語
列車弓網關系的穩定直接影響列車的安全運行。而弓網間接觸力的穩定則尤為關鍵。比較上述3種控制算法結合接觸力評價指標可以得出結論:對于列車弓網系統,施加主動控制能夠極大提高弓網系統的穩定性。對比分析3種控制器可發現,PID、模糊滑模控制及模糊滑模自適應PID的控制效果依次提高。為研究高效智能的弓網主動控制系統提供科學理論依據。
參考文獻
[1] 郭京波. 高速機車受電弓穩定受流與控制研究[D]. ?北京:北京交通大學,2006.
[2]喬楓,郭慧佳,李界家,等. 二級倒立擺系統的模糊滑模變結構控制[J]. 沈陽建筑大學學報(自然科學版),2010,26(4):792.
[3]崔營波. 高速列車受電弓半主動控制方法研究及應用[D]. 北京:北京交通大學,2018.
[4]劉浩,錢存元,施招東. 基于模糊自適應PID控制的ATO系統控制算法[J]. 城市軌道交通研究,2017(3):40.
[5]孫磊,孫冬梅,袁倩,等. 基于模糊滑模變結構的磁軸承振動控制研究[J]. 科技通報,2018,34(9):186.
[6]張兆東,徐小亮,楊楊,等. 基于模糊PID控制策略的液壓缸試驗臺加載系統設計[J]. 南京理工大學學報,2019,43(1):78.
[7]張紅,徐海軍,劉淑榮,等. 基于改進模糊PID控制的循環水優化仿真[J]. 電氣應用,2014,33(24):134.
[8]GUAN Kaizhong, LUO Zhiwei. Stability results for impulsive pantograph equations[J]. Applied Mathematics Letters, 2013, 26(12): 1169.
[9]劉浩,錢存元,施招東. 基于模糊自適應PID控制的ATO系統控制算法[J]. 城市軌道交通研究,2017(3):40.
[10]郭桂林. 高速受電弓控制系統研究[D]. 成都: 西南交通大學, 2014.
[11]韓南南. 基于接觸網動力學參數變化的弓網系統振動特性研究[D]. 上海:上海工程技術大學,2016.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
