基于無位置傳感器的電子水泵控制系統設計
2020-07-04 02:27:37朱文龍馬西沛何鄭王一鳴
智能計算機與應用 2020年3期
朱文龍 馬西沛 何鄭 王一鳴

摘要:在對無位置傳感器直流無刷電機(BLDCM)的工作原理分析后,本文設計了一種基于無位置傳感器的BLDCM控制系統。根據汽車用電子水泵對控制器功能的要求,該系統主要包括CAN通信電路、電流檢測電路、電機驅動電路、電平轉換電路等;采用速度和電流雙閉環控制,輸出轉矩穩定,提高了電機的響應速度。最后利用以STM32系列微控制為核心的BLDCM實驗平臺進行驗證,實驗結果表明,該控制系統具有較好的穩態和動態性能,適用于汽車、卡車或其它工業領域。
關鍵詞: 無刷直流電機; 矢量控制; 無位置傳感器; STM32
【Abstract】 After analyzing the working principle of the position sensorless brushless DC motor (BLDCM), a BLDCM control system based on position sensorless is designed. According to the requirements of the controller for the electronic water pump of the automobile, the system mainly includes a CAN communication circuit, a current detection circuit, a motor drive circuit, a level conversion circuit, etc.; uses the double closed loop control of speed and current, stabilizes the output torque and improves the response speed of the motor. Finally, the BLDCM experimental platform based on STM32 series micro-control is used to verify. The experimental results show that the control system has good steady-state and dynamic performance, which is suitable for automotive, truck or other industrial fields.
【Key words】 ?brushless DC motor; FOC; positon sensorless; STM32
0 引 言
無刷直流電機(BLDCM)具有結構簡單、運行可靠和效率高等顯著優點,近年來被廣泛應用到電器、車輛、航天和軍事等領域。在無刷直流電機控制當中,通常采用有位置傳感器獲取轉子信號位置的方法。有位置傳感器控制方案具有控制程序相對簡單、維護簡單等優點[1],但其結構復雜、成本高和易損壞的特點限制了其在振動環境、高溫環境等惡劣工況下的應用,例如汽車發動機艙,因此本文擬采用無位置傳感器控制方案對汽車電子水泵控制器進行設計。在中小功率無刷直流電機設計中,常常采用轉矩分數槽繞組,其反電動勢波形比較接近正弦波[2],本文討論的就是反電動勢為正弦波的無刷直流電機。對于反電動勢為正弦波的無刷直流電機,通常具有方波驅動和正弦波驅動兩種控制方法。方波驅動控制方法,系統噪聲大,運行效率低,轉矩波動大;相比之下,正弦波驅動具有明顯的優勢,正弦波驅動控制下,電機不僅效率高,運行噪聲也低,因此,本文采用正弦波的驅動方法。
基于正弦波的優點,國內外學者研究了各種正弦波驅動方法[3-6]。簡易正弦波(SPWM)方法由于無法獲得最大轉矩,因此需要調整電壓相位;磁場定向控制,簡稱矢量控制(FOC)方法雖然算法實現較為困難,但具有控制精度更高、輸出轉矩大和高效率等優點。因此,本文采用STM32F103RCT6微控制器作為電機控制系統主控芯片,實現基于無位置傳感器的直流無刷電機的矢量控制;該方法不僅成本低,還能實現復雜的控制算法,具有較好的應用前景。
1 原理分析
1.1 轉子磁場定向控制技術
2 控制系統硬件電路設計
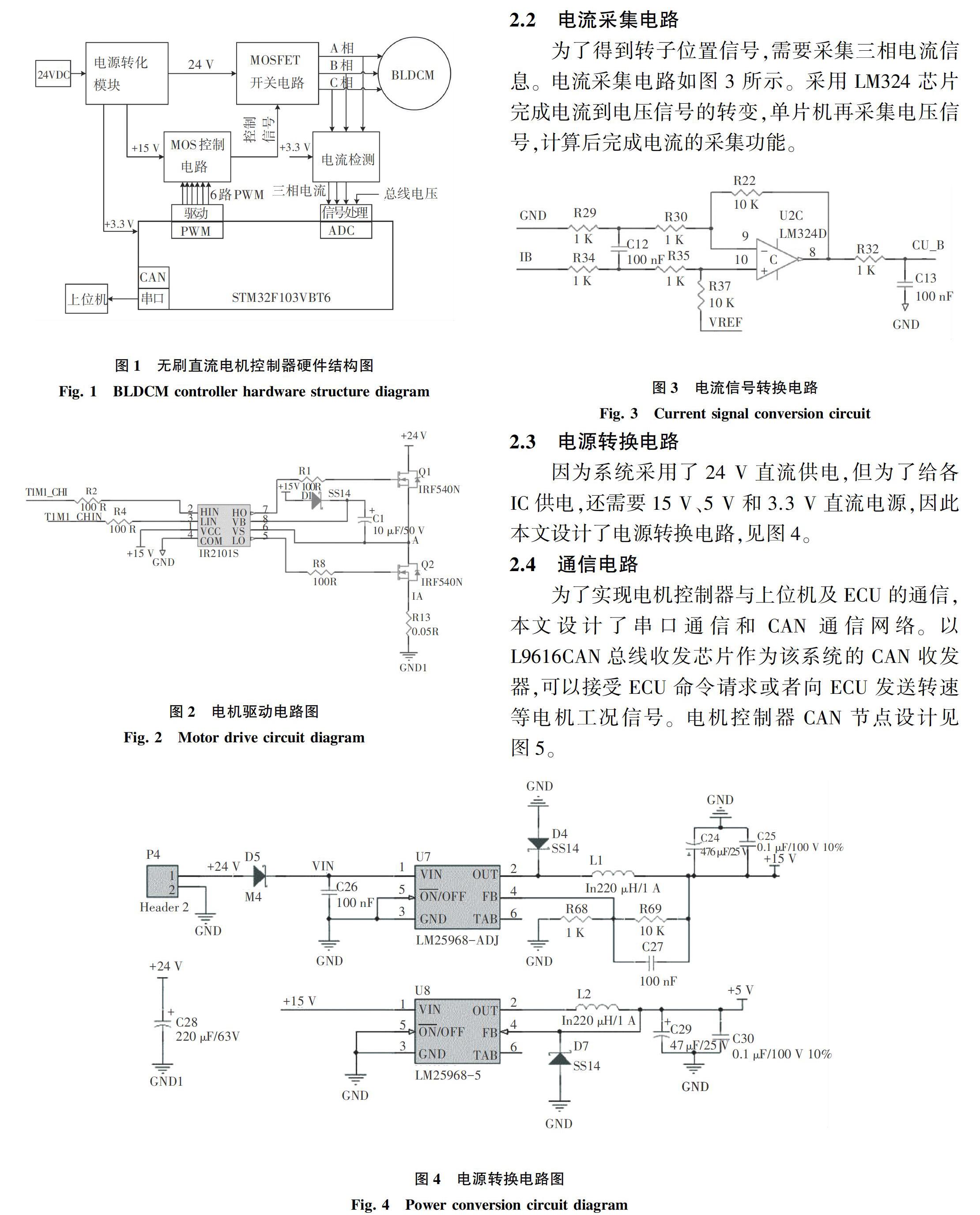
無刷直流電機的無位置傳感器控制系統由電源轉換電路、單片機電路、MOSFET驅動電路、電壓電流檢測電路和通信電路等共同組成,硬件系統各模塊如圖1所示。單片機采用ST公司的STM32F103C8T6為主控制芯片,主頻率達72 Mhz,滿足控制系統對性能的需求。
2.1 MOSFET驅動電路
在電機驅動電路中,本文選用IR2101S作為MOS管開關控制芯片,選用IR公司的IRF540N作為MOSFET開關管。IR2101S控制芯片的反應時間為150 ns左右,可以同時控制2個MOS管,性能優異,滿足本文研究的需求;IRF540N在100°下最大能承受23 A電流,瞬間峰值電流為110 A。電機驅動電路如圖2所示。
2.2 電流采集電路
為了得到轉子位置信號,需要采集三相電流信息。電流采集電路如圖3所示。采用LM324芯片完成電流到電壓信號的轉變,單片機再采集電壓信號,計算后完成電流的采集功能。
2.3 電源轉換電路
因為系統采用了24 V直流供電,但為了給各IC供電,還需要15 V、5 V和3.3 V直流電源,因此本文設計了電源轉換電路,見圖4。
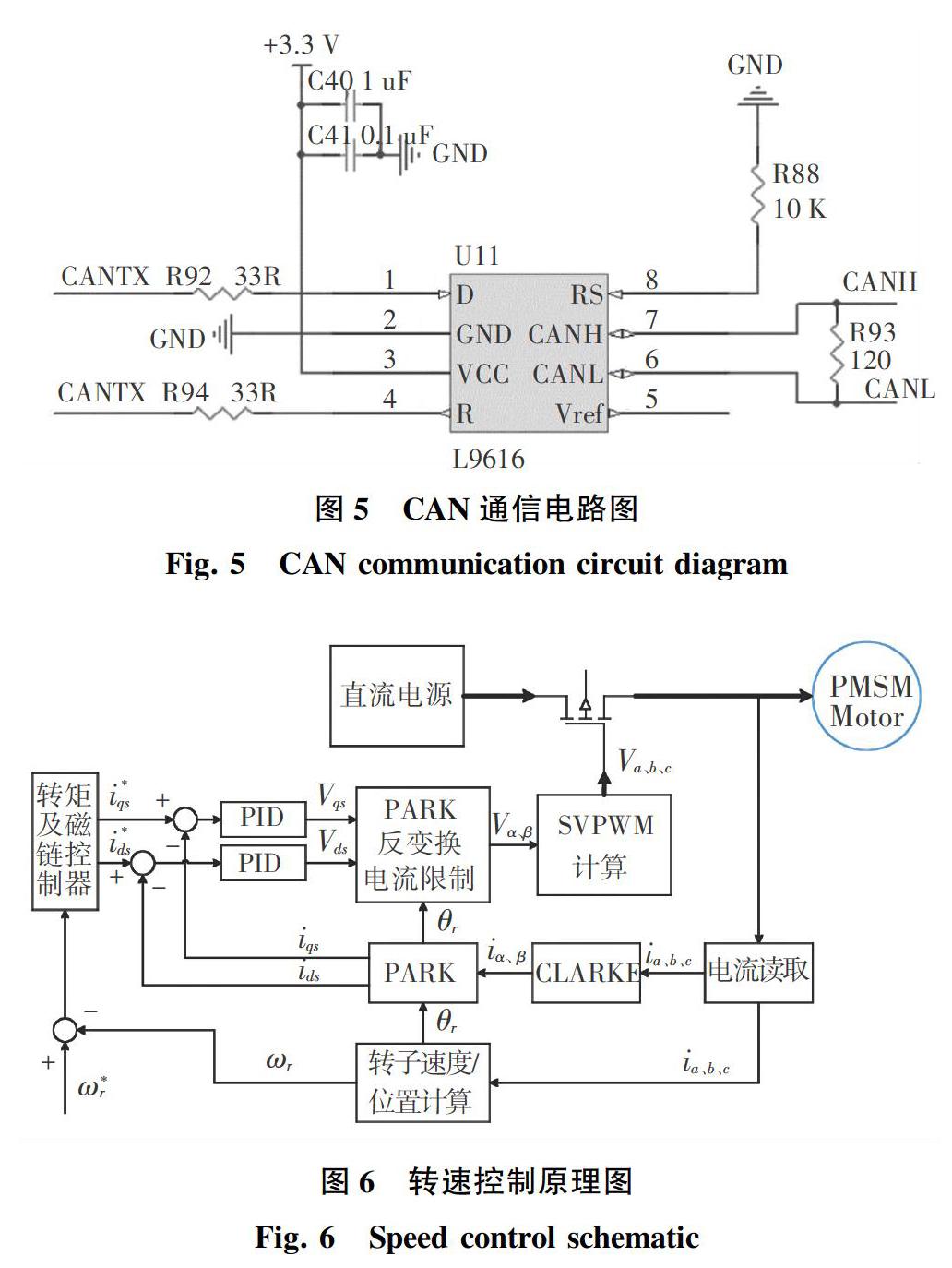
2.4 通信電路
為了實現電機控制器與上位機及ECU的通信,本文設計了串口通信和CAN通信網絡。以L9616CAN總線收發芯片作為該系統的CAN收發器,可以接受ECU命令請求或者向ECU發送轉速等電機工況信號。電機控制器CAN節點設計見圖5。
3 控制系統軟件設計
本文設計內環為電流環。通過電流采樣得到電流信號,通過Clarke和Park變換后得到d、q軸電流iqs和ids;再經過q、d軸電流PID調節器,Park反變換后,并由SVPWM調制后,轉變為逆變器電路控制信號輸入電機逆變電路中。外環設計為轉速環,由前文推論可知,由電流信號可以計算出轉子的位置信息和轉速信息,通過與目標轉速相減得到速度偏差后,經過轉矩及磁鏈控制器,得到q、d軸的電流參考信號,隨后系統進入內環處理程序。轉速控制原理圖見圖6。本文選擇TIM1高級定時器的CH1、CH2和CH3通道為三相逆變電路的上橋臂PWM驅動信號,選擇CH1N、CH2N和CH3N為逆變電路的下橋臂PWM驅動信號。由STM32芯片的ADC1、ADC2的多個通道進行采集電流信號。
5 結束語
針對方波驅動容易出現電磁噪聲大、轉矩脈動大等問題,本文基于無位置傳感器控制策略,實現了正弦波驅動的轉速和電流雙閉環控制方案。實驗結果表明,該方案獲得較好的系統動態和穩態性能,達到了比較理想的控制效果,并且具有較高的工程應用價值,同時也為以后的程序優化研究提供了支撐。
參考文獻
[1] ?夏長亮. 無刷直流電機控制系統[M]. 北京:科學出版社, 2009.
[2] 吳勇, 王友仁, 王強, 等. 基于STM32的無刷直流電機正弦波驅動控制系統設計[J]. 微電機, 2015,48(9):39.
[3] 黃科元, 金其軍, 黃守道. 一種永磁同步電機轉子位置混合辨識方法[J]. 電工技術學報, 2018, 33(9):1938.[JY](下轉第278頁)[FL)]
[4] 劉云, 賈洪平, 張鵬, 等. 基于SVPWM的無刷直流電機矢量控制系統研究[J]. 機電工程, 2014,31(9):1177.
[5] 姚緒梁,魯光旭,王景芳,等. 基于最優電流矢量的無刷直流電機換相轉矩脈動抑制方法[J]. 中國電機工程學報,2019,39(14):4272.
[6] 胥思蒙, 耿攀. 基于滑模觀測器的永磁同步電動機無傳感器控制策略[J]. 上海電機學院學報, 2018, 21(5):8.
[7] 華志廣, 竇滿峰, 趙冬冬, 等. 基于改進型滑模觀測器的PMSM無位置傳感器控制[J]. 西北工業大學學報, 2018,36(4):754.
[8] 王正, 王一平. 基于滑模觀測器的PMSM無速度傳感器研究[J]. 微電機, 2012, 45(5):52.
[9] 李冉. 永磁同步電機無位置傳感器運行控制技術研究[D]. 杭州:浙江大學,2012.
[10]張乘瑋, 沈漢林, 唐其鵬, 等. 一種高效的PMSM無位置傳感器I/f控制方法[J]. 微特電機, 2017,45(10):48.
[11]李海劍, 易映萍. 基于自適應擾動觀測器的PMSM無傳感器控制[J]. 電子測量技術, 2018,41(21):123.
