三自由度懸索并聯機器人動態點對點軌跡跟蹤控制
2020-07-04 02:14:28任憑何夢伊
電腦知識與技術 2020年14期
任憑 何夢伊
摘要:本文針對三自由度懸索并聯機器人的動態點對點軌跡設計計算力矩控制器并進行跟蹤控制。由于懸索并聯機器人的懸索只能承受單向拉力,使得設計控制器時需考慮此張力約束,從而得到一組張力約束不等式以表示懸索張力和控制器參數間的關系。對不等式進行區間分析,從而確定滿足懸索張力約束的控制器可靠參數空間。本文所提出的方法不僅可以實現對動態工作空間內的點對點軌跡的跟蹤,而且當軌跡初始狀態位于期望軌跡之外時,該方法可以實現運動軌跡的自動過渡。仿真結果表明,區間分析得到的控制器可靠參數空間可以確保末端執行器以指數速率收斂于期望軌跡,并始終保持懸索張力為正。
關鍵詞:懸索并聯機器人;計算力矩法;區間分析;軌跡跟蹤
中圖分類號:TP242 文獻標識碼:A
文章編號:1009-3044(2020)14-00014-06
并聯機器人根據傳遞元件不同可以將并聯機器人分為剛性連桿并聯機器人和柔索牽引并聯機器人(Cable-Driven Par-allel Robots,CDPRs)兩類。柔索牽引并聯機器人采用質量輕且無剛性的柔.1生繩索替代質量重的剛性連桿,使其既具有剛性連桿并聯機器人剛度高、承載能力強等優點,又具有工作空間大、運動慣量小和運動速度快等優點。此外由于其結構簡單、易于模塊化,因此制造和維修成本較低。柔索牽引并聯機器人的這些優勢,使其在物料搬運、天文觀測和運動仿真等領域得到了廣泛運用。
為了提高機器人的性能,通常需要與控制方法相結合。根據控制時所選用模型的不同,通常將并聯機器人的控制方法分為運動學模型控制和動力學模型控制兩類。本文所選取的是動力學模型控制中的計算力矩方法,以機器人動力學模型為基礎,加人位移、速度反饋和加速度前饋得到相應控制器,消除機器人系統中的一些非線性項,從而使機器人化為一個更容易受控制的線性定常系統嘲。
在對柔索牽引并聯機器人的控制研究中,由于柔索只能對末端執行器產生拉力而不能產生推力,這種單向張力約束導致其控制研究具有一定難度。目前針對這種張力約束的處理方法主要存在以下三種:(1)經驗法,根據仿真或實驗結果反復試驗控制器參數以滿足柔索的張力約束。如Gorman等設計了三自由度懸索并聯機器人的滑模控制器,并通過實驗獲得了控制器的增益數值。(2)張力分配優化方法,針對存在冗余索的柔索牽引并聯機器人,通過優化算法將末端執行器的控制力分配至各條柔索,以維持柔索的張緊狀態。如Khosravi等設計了平面三自由度四索構型的魯棒PID控制器,采用零空間方法對張力進行了分配。(3)工作空間方法,對于不存在冗余索的懸索并聯機器人,無法對張力分配進行優化,處理張力約束的方法可以與工作空間分析相融合。針對當前控制器參數推導其可達工作空間,在初始點位與目標點位之間設置過渡點位,使末端執行器分步到達期望位置。如Oh與Agrawal對六自由度懸索并聯機器人控制器的參考輸人進行規劃,獲得了位于控制器可達工作空間內的過渡點,并用解析不等式組描述出了滿足張力約束的可達工作空間范圍,從而使過渡點的計算更加高效。本文在上述方法的基礎上,提出一種在懸索并聯機器人控制研究中處理張力約束問題的新方法,即將對可達工作空間的分析轉化為對控制器參數空間的分析。
目前針對三自由度懸索并聯機器人的控制研究中,在國外,Jiang和Gosselin提出了一種點到點運動的動態軌跡規劃方法,軌跡可以用來連接機器人靜態工作空間以外的連續目標點,同時保證了每個目標點的零速度和加速度的連續性;在此基礎上,Dion-Gauvin和Gosselin根據由初始點和最終點的加速度矢量定義的平面中的內擺線曲線,提出了一種新的點到點運動的動態軌跡規劃方法,不僅滿足上述條件,同時還可以通過適當選擇內擺線的弧數保證柔索張力始終為正。而在國內,中國科技大學的張兵園等采用s型速度規劃方法規劃了工作空間內的矩形折面軌跡和平面圓形軌跡,并設計了一種實時張力補償的自適應同步控制器對其進行軌跡跟蹤控制。
本文同樣以三自由度懸索并聯機器人為研究對象,在文獻規劃的動態工作空間內點到點軌跡的基礎上,設計軌跡跟蹤計算力矩控制器,圍繞柔索張力始終為正這一約束條件,得到滿足此張力約束的控制器可靠參數空間,確保末端執行器收斂于給定軌跡,從而實現機器人的軌跡跟蹤控制。
1機器人動力學模型
三自由度懸索并聯機器人的幾何構型如圖1所示,由電機驅動的三個線軸分別固定在水平框架的p1、p2和p3位置,三條懸索分別從線軸伸出,連接至末端執行器。將該末端執行器視為質點m,質量忽略不計。圖中柔索的長度分別用L1、L2和L3來表示。系統的靜態工作空間可認為是線軸在水平框架上的三個固定點沿重力方向垂直向下構成的區域。
機構在運動過程中需時刻嚴格滿足上述不等式,從而保證柔索的拉力始終大于零。因此在接下來的計算力矩控制器的設計中,不等式(4)、(5)和(6)將成為求解控制器參數的三個約束條件。
2計算力矩控制器設計
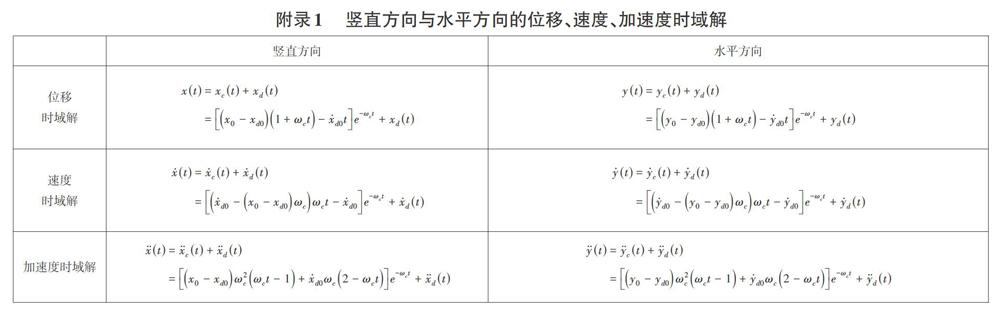
為了更好地對三自由度懸索并聯機器人在動態工作空間內的動態點對點軌跡進行跟蹤控制,首先采用文獻中的方法設計計算力矩控制器。根據三自由度懸索并聯機器人的動力學模型(1)和(2),柔索張力的控制輸入可選為:
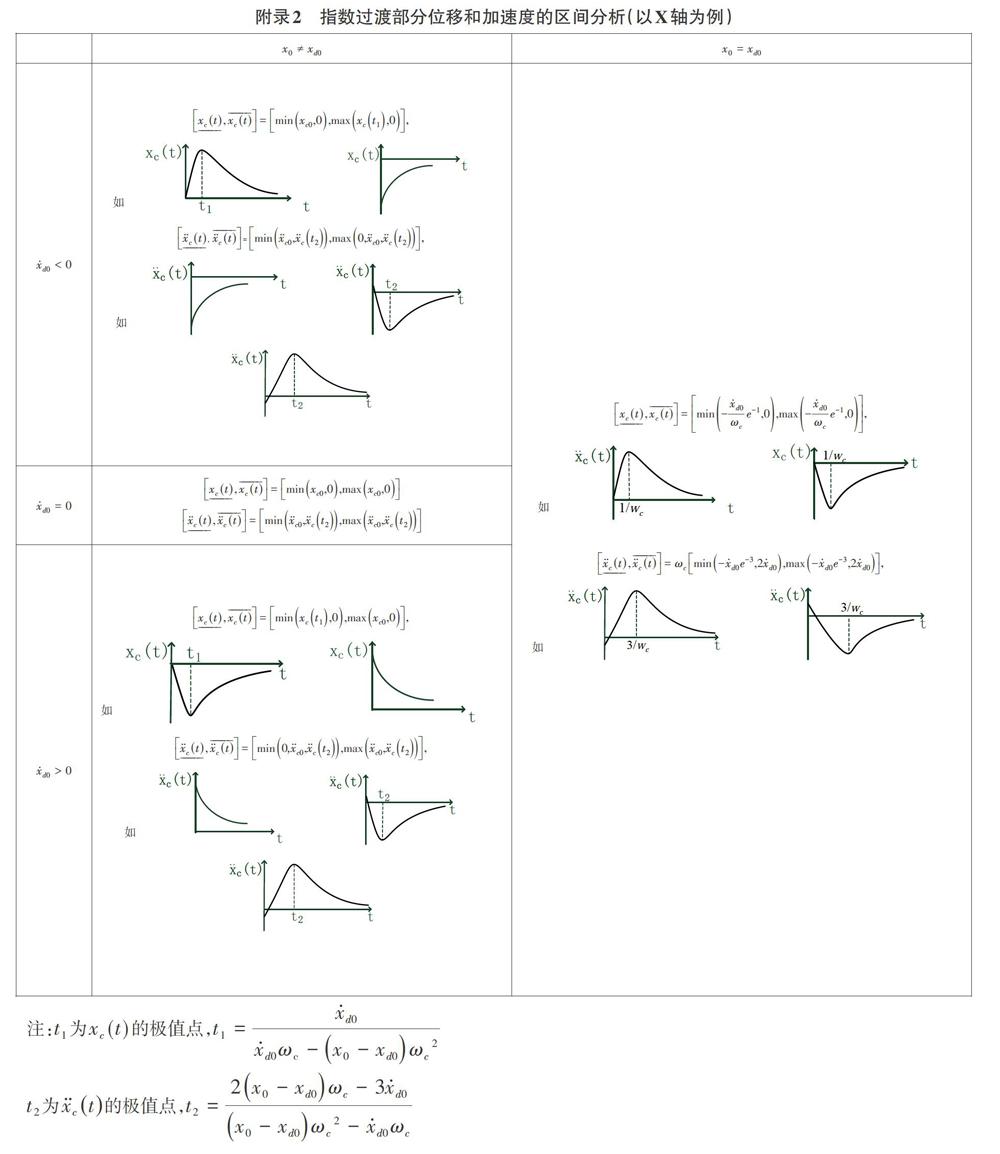
上述不等式為機構運動時張力約束條件區間分析的一般形式,通過求解不等式(18)(19)和(20)即可獲得控制器參數滿足張力約束的充分條件。其中,對指數過渡部分位移和加速度的區間分析如附錄2所示。
3.2控制器參數可靠空間分析
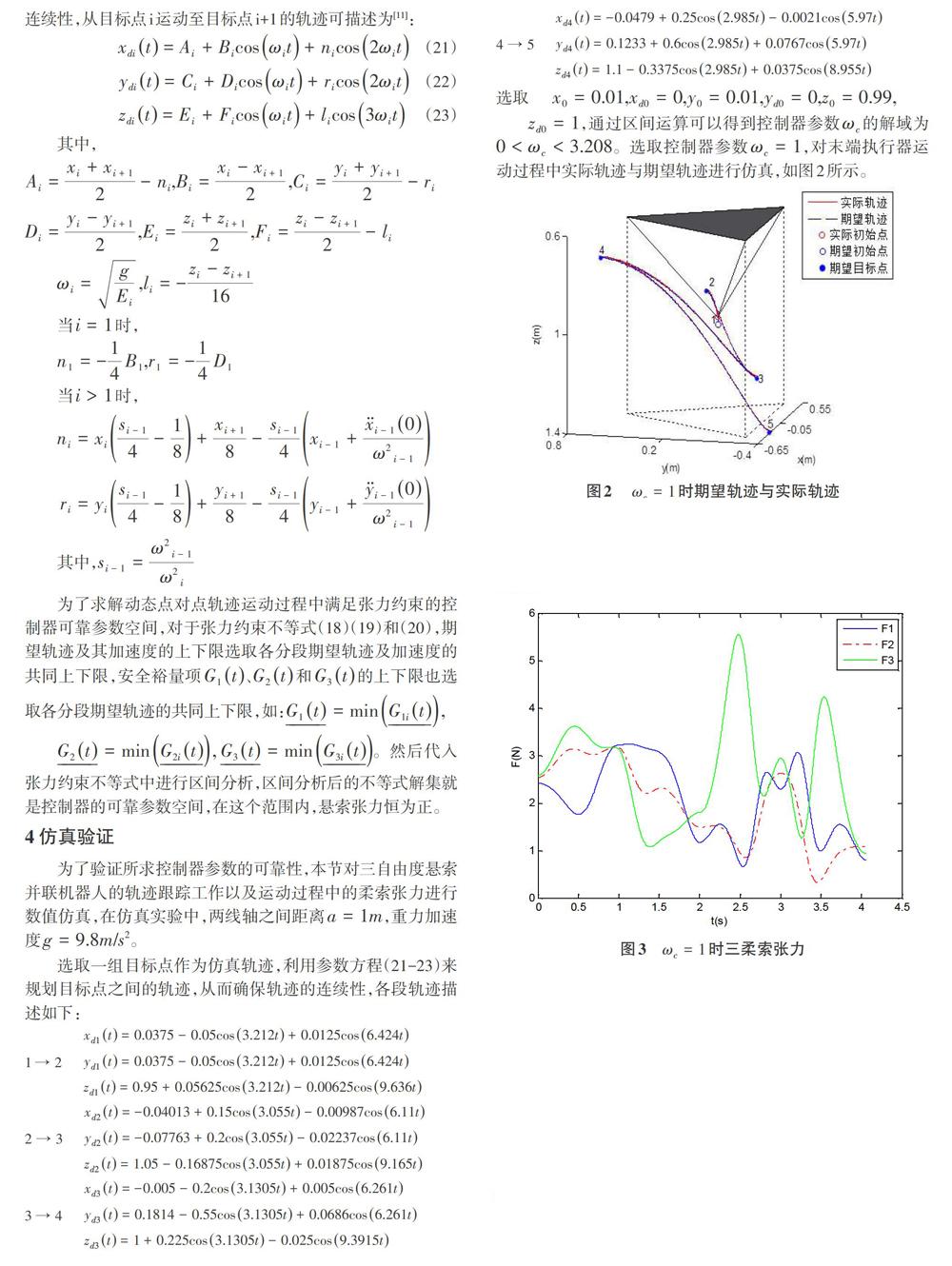
動態點對點軌跡要求末端執行器依次通過靜態工作空間外的一系列點位,因此采用分段連續方程構建期望運動軌跡。為了確保各目標點的瞬時速度均為零以及各段軌跡加速度的
為了驗證所求得的控制器可靠參數空間滿足機構張力約束,對上述參數下的點對點運動過程中的張力進行仿真,如圖3所示。從圖3中可以看出機器人懸索在運動過程中張力恒為正。
5結論
本文針對三自由度懸索并聯機器人的動態點對點軌跡進行跟蹤控制,首先設計了一種計算力矩控制器,隨后采用區間分析方法,圍繞懸索并聯機構的柔索張力始終為正這一約束條件得到三個不等式,從而獲得控制器可靠參數空間。在此可靠參數空間內選擇的控制器參數可嚴格保證三自由度懸索并聯機器人在動態點對點軌跡運動過程中的三條懸索滿足其張力約束。
仿真實驗結果表明本文所提出的方法可以使末端執行器以指數速率收斂于期望軌跡,并實現運動軌跡的自動過渡。本文中采用控制算法與軌跡規劃方法相互配合,可以提高動態響應速度,減少跟蹤誤差,從而提高懸索并聯機器人的整體性能。這種控制方法不僅適用于三自由度懸索并聯機器人中超出靜態工作空間的動態點對點軌跡,而且可以擴展到六自由度構型的類似軌跡。
