BP-PID控制器在雙電機消隙伺服系統中的應用
2020-07-04 20:28:28王軒
現代信息科技 2020年3期
關鍵詞:仿真
摘? 要:為了更好地改進伺服系統性能表現,文章以某雙電機消隙伺服系統為背景,首先分析了齒隙對伺服系統性能的影響。然后針對經典PID控制器的局限性,嘗試將BP神經網絡與經典PID控制器結合在一起,設計了BP-PID控制器。最后通過Matlab/Simulink仿真結果驗證了BP-PID控制器使雙電機驅動消隙伺服系統的性能表現得到明顯改善。
關鍵詞:雙電機伺服系統;齒隙;BP神經網絡;仿真
中圖分類號:TP273? ? ? ? 文獻標識碼:A 文章編號:2096-4706(2020)03-0161-03
Abstract:In order to improve the performance of the servo system,this paper takes a dual-motor anti-backlash servo system as the background.Firstly,the influence of backlash on the servo system is analyzed. Then,aiming at the limitations of the classic PID controller,we tried to combine the BP neural network with the classic PID controller to design the BP-PID controller. Finally,Matlab/Simulink simulation results verify that the performance of the dual-motor anti-backlash servo system is significantly improved by the BP-PID controller.
Keywords:dual-motor servo system;backlash;BP neural network;simulation
0? 引? 言
伺服系統在實際工況中,齒隙、死區等非線性因素會嚴重影響伺服系統的性能表現,其中齒隙對伺服系統性能影響最大[1],易引起系統振蕩,產生較大的穩態誤差。因此雙電機驅動方式通常被采用于伺服系統設計中,能夠保證伺服系統有效地抑制齒隙對性能的影響[2]。
經典PID控制器有著算法結構簡單、適用面廣等特點,但經典PID控制器想要取得良好的控制效果,就必須調整好比例、積分和微分三種控制作用之間的關系,而雙電機伺服系統作為復雜的非線性系統,經典PID控制器很難達到最優的控制效果。神經網絡因具有逼近任意非線性函數的能力,使得我們可以將神經網絡與經典PID控制器結合在一起,通過BP神經網絡系統來完成控制器最佳控制參數調整的功能,從而實現一種由BP神經網絡參數自整定的PID控制。
1? 雙電機消隙伺服系統
1.1? 齒隙對伺服系統性能影響
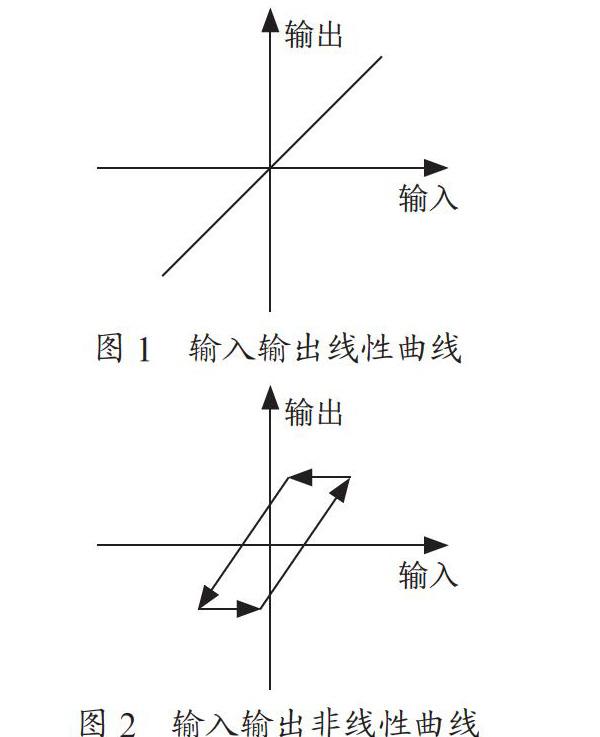
理想工況下,齒輪傳動的輸入輸出關系應當是如圖1所示的線性關系。但在現實工況中,齒隙必然存在于一對相互嚙合的齒輪之間。傳動過程便因此受到齒隙的影響,使主動齒輪進行啟動或換向運動時,從動齒輪無法立即跟隨主動齒輪完成運動,而是需要等到全部齒隙量走完才重新和主動齒輪嚙合,因此使整個系統在進行傳動工作時存在回差,讓整個齒輪傳動輸入輸出變為如圖2所示的非線性關系[3]。
1.2? 雙電機消隙伺服原理
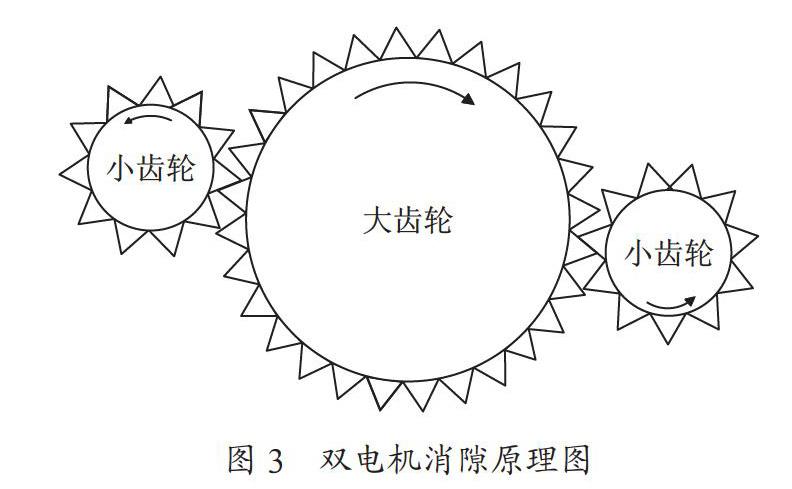
雙電機伺服系統是由兩臺性能參數相同的伺服電機各自與參數結構相同的減速器、驅動小齒輪結合,并通過小齒輪與連接負載的大齒輪嚙合,實現共同驅動負載轉動的功能。
雙電機伺服系統消隙作用原理:如圖3所示,在系統進行啟動和換向這些存在齒隙影響的傳動過程中,通過控制兩個電機產生偏置力矩,讓兩個小齒輪中始終至少有一個保持與大齒輪緊密嚙合,從而使大齒輪處在一個無法在齒隙中運動的狀態,進而消除齒隙影響[4,5]。
1.3? 雙電機消隙伺服系統結構
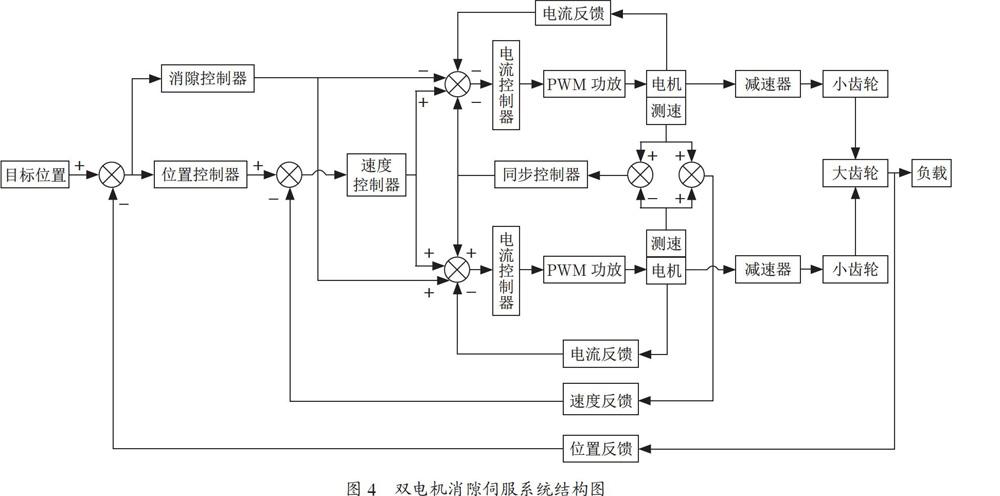
如圖4所示,雙電機消隙伺服系統是由電流環、速度環、位置環構成的三環閉環控制。電流環與速度環通過各自反饋控制減小非線性干擾對系統的影響。位置環直接影響系統對目標的截獲、跟蹤等功能的速度與精度。同步控制器通過差速負反饋控制實現抑制兩個電機速度不一致時引起的差速振蕩功能。消隙模塊通過輸出消隙變偏置電流實現消隙功能,消隙偏置電流和差速負反饋控制信號均直接作用于系統電流環。
2? BP神經網絡PID控制
2.1? BP神經網絡PID控制器結構
BP神經網絡PID控制器如圖5所示,由兩部分組成,一部分是根據輸入的系統即時狀態進行PID控制器參數優化的BP神經網絡,另一部分是根據BP神經網絡優化調整后輸出的kp,ki,kd參數對被控對象進行控制的經典PID控制器[6]。
2.2? BP神經網絡結構
具有隱含層的BP神經網絡結構圖如圖6所示。BP神經網絡具有兩個特點:一是網絡是全連接的,即在任意層上的一個節點與它之前的層上的所有節點都連接起來;二是網絡至少具有一個隱含層,信號從左到右一層接一層向前逐層流過,是個多層前饋網。本次系統采用3-7-3結構的三層BP神經網絡[7]。
2.3? BP神經網絡PID理論算法
網絡輸入層節點的輸入輸出分別為:
3? 仿真結果
為了驗證BP神經網絡PID算法的有效性,在Matlab中的Simulink環境下搭建被控對象仿真模型,并分別對經典PID控制器與BP神經網絡PID控制器進行仿真。
本次BP神經網絡結構采用3-7-3結構,即輸入層3個節點,分別為系統輸入信號、系統輸出信號以及誤差信號,隱含層為7個節點,輸出層為3個節點,輸出即為PID控制器的3個參數kp,ki,kd。學習率η取0.3,動量因子α取0.08,權值矩陣初始值取區間[-1,1]上隨機數。
輸入信號取幅值為1的階躍信號,采樣時間取0.001 s,經典PID控制器與BP神經網絡PID控制器階躍響應對比曲線如圖7所示。從階躍響應結果可以看出,BP-PID控制器有著更小的超調量和更快的調節時間。
為了對比經典PID控制器與BP神經網絡PID控制器的抗擾動水平,設計當系統階躍響應達到穩定狀態后,在第4 000個采樣時間時給系統添加一個幅值為1.2的干擾信號,相應的仿真對比曲線如圖8所示。從仿真曲線可以看出,BP-PID控制器在有擾動時,有著更小的振蕩值和更快的調節時間,相比于經典PID控制器有著更強的抗干擾能力。
4? 結? 論
MATLAB仿真結果表明,基于BP神經網絡的自整定PID控制器相比于經典PID控制器,在控制精度、魯棒性、抗干擾能力等方面有著更好的性能表現。因此將神經網絡思想與經典PID控制結合在一起是可行的,為伺服系統智能控制算法發展提供了一個新的方向。
參考文獻:
[1] 袁新星.多電機同步聯動消隙伺服系統動力學建模與控制研究 [D].南京:南京理工大學,2014.
[2] 龔時華,李斌,朱國力.基于非線性特性的大型轉臺精密運動控制技術 [J].電氣傳動,2010,40(7):42-45.
[3] 曾榮.多電機同步聯動控制系統的設計與實現 [D].南京:南京理工大學,2004.
[4] 尹翔陵.雙電機消隙直流驅動器在艦載測量雷達中應用 [J].現代雷達,2008,30(11):67-69.
[5] 馬艷玲,黃進,張丹.伺服系統中齒隙非線性的自適應補償 [J].系統仿真學報,2009,21(5):1498-1501+1504.
[6] 徐麗娜.神經網絡控制 [M].哈爾濱:哈爾濱工業大學出版社,1999.
[7] 張澤旭.神經網絡控制與MATLAB仿真 [M].哈爾濱:哈爾濱工業大學出版社,2011.
作者簡介:王軒(1993-),男,漢族,陜西西安人,碩士研究生在讀,研究方向:控制系統。
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
