基于積木式機器人的機電專業信息化課程教育實踐
2020-07-04 04:27:40蔡舒旻
機電信息 2020年14期

摘要:以積木式機器人為載體,將《機械設計基礎》《傳感器應用技術》和《單片機控制技術》等機電類專業課程內容進行合理整合,有針對性地將創新精神、創新知識、創新技能與活動融入專業教育中,探討了機電專業課程與創新教育融合的教學內容、方法和模式。
關鍵詞:積木式機器人;機電信息化;創新教育;課程融合
0 引言
創新教育是以培養創新意識、創新精神、創新思維、創新能力為目標的創新人才的培養活動。相對于傳統教育,它是一種新型的教育模式,是一種全新的以創新為先導的教學模式,是教學內容、方法、思想、評價及教育體制的創新[1]。
機器人可看作是一個典型的綜合性學習平臺,其集合了現代工業產品設計、機械設計、電子技術、傳感器技術、計算機軟件編程、人機交互和人工智能等諸多領域的先進技術,在職業教育課堂中,尤其是機電類專業課程的教學中,引入積木式機器人對于打破學科界限,實現學科間的深度融合意義重大,對于激發學生的學習興趣,開拓學生專業視野,培養學生的科學精神有著深刻的現實指導作用。
1 課程融合的設計理念
筆者在對專業課程內容進行整合設計和實施時,始終貫徹工程實踐和創新的原則和方法。通過建構課程主題,呈現積木式機器人的結構設計、結構搭建、程序編寫、整機調試等一系列的探究式活動,使得學生在教學項目的反復改進過程中掌握專業知識,同時形成先進的創新理念,掌握創新技巧,提升創新能力。課程設計注重學科課程之間的融合,將學生綜合知識與技能的學習置于首位,構建了涉及機械設計、電子技術和單片機編程技術等幾大領域的項目課程體系。
1.1 ? ?基于建構主義學習理論的積木式機器人項目課程
以機電一體化專業為例,在教學實踐活動中,我們以積木式機器人為載體,提取該專業“機械設計基礎”課程中的機構、傳動、零件模塊中的相應內容,結合“傳感器應用技術”課程中的光敏、磁敏、超聲等傳感器內容以及“單片機控制技術”課程中相應的計算機編程思想與原理,構建了一個多學科融合、多技術集成,且符合學生認知規律的項目實踐平臺。在課程教學中,教師充分利用積木式機器人平臺的實施特點,結合機器人系統的具體部件與編程環境進行具體教學項目的設計,包括了重構課程知識點和建構與實際問題密切相關的學習主題,通過動手實踐培養學生的綜合能力,如團隊協作能力、問題解決能力、交流溝通能力和創新思維能力等。
1.2 ? ?主題項目設計原則
在進行積木式機器人主題項目設計時,首先要考慮其可實施性,需要把握機電一體化集成與融合的關鍵和核心,既需要考慮系統硬件方面的實施基礎,又要考慮學生自身的學習基礎、知識和技能儲備等軟件方面的實施基礎。其次,要充分權衡每個教學項目的容量是否均勻和適當。最后,要注重項目與項目之間進階展開,保證學生能很容易地投入并沉浸至項目中,同時在項目實施過程中不斷有新的挑戰來吸引和激勵他們,從而提高學生解決問題的能力與信心。
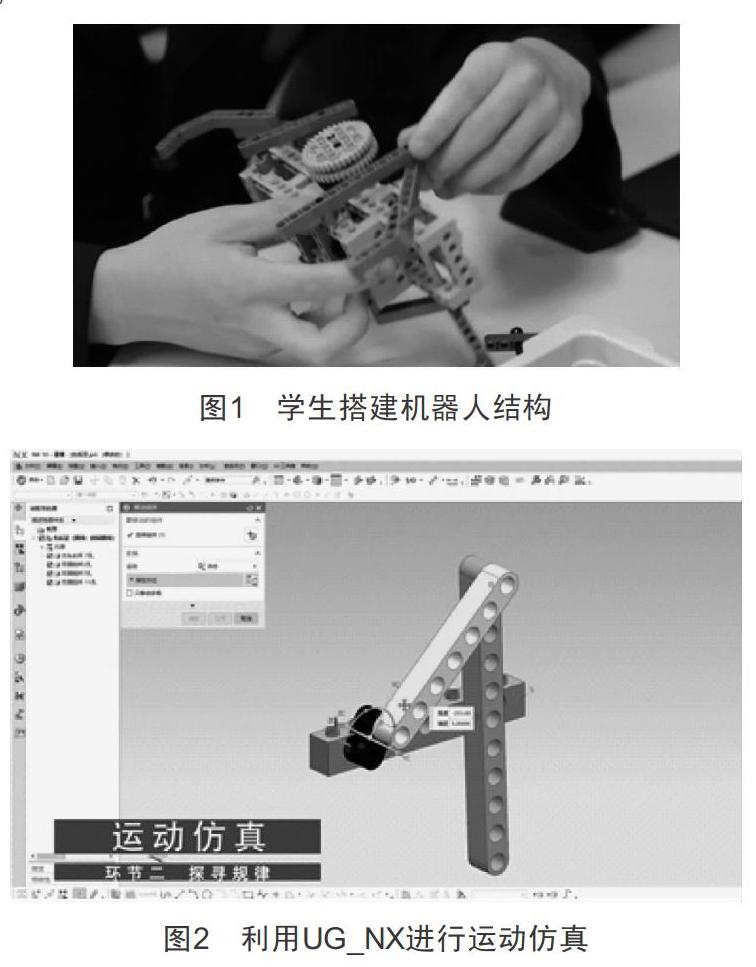
本文以消防機器人項目為例,學生在設計主傳動結構時,將應用到課程中的蝸輪蝸桿傳動和齒輪傳動等相關知識;在設計爬行足結構時,將應用到四桿機構的相應知識;而在設計消防彈拋擲結構時,將應用到棘輪機構的相應知識。學生搭建的機器人結構如圖1所示,利用UG_NX進行運動仿真如圖2所示。
此外,學生還將應用“傳感器應用技術”的紅外傳感器進行火源的判斷,應用超聲傳感器進行測距避障等;應用“單片機控制技術”中對驅動電機的轉向、轉速控制知識及條件判斷和循環等單片機編程思想。在各門課程中,學生分別完成相應的主題任務,最終整合成一個完整的綜合性項目,使積木式機器人能感應到模擬的火源,并能運動到相應的位置拋擲消防彈至火源,完成滅火動作。
2 主題任務教學實踐案例
筆者所在教學團隊進行了兩輪的教學實踐—反思—改進的循環研究,并逐步完善課程的設計和實施過程。下面以某項目中消防機器人的任務二:爬行機構設計中的機械部分為例,就課程的實施過程進行具體闡述。
2.1 ? ?課前準備
課前,學生預習教師推送的學習資源,完成了相應的練習:(1)根據運行動畫判斷機構類型;(2)根據桿長條件判斷機構類型。
2.2 ? ?課堂實施
2.2.1 ? ?環節1:創設情境
課中,教師播放消防機器人攀爬動畫,發布任務主題:搭建機器人爬行足。學生觀看動畫,并分組嘗試搭建爬行足結構,部分組的爬行足無法正常工作,教師引導學生分析原因。
2.2.2 ? ?環節2:探尋規律
學生調用教師創建的零件模型,進行虛擬裝配和運動仿真,測試不同桿長條件下機構的運行情況,發現在最短桿與最長桿之和≤其余兩桿之和的情況下才有可能存在曲柄,而最短桿所在位置又決定了機構的類型。學生分別測試最短桿在各位置時的機構運行情況,小組對測試情況進行總結和歸納,得出機構類型判斷的依據,并分組進行匯報。
2.2.3 ? ?環節3:實踐檢驗
小組根據上述曲柄存在的條件驗證各自的設計,并挑選一個方案進行實際改造,利用可視化編程工具,使機器人完成前行和后退動作。學生根據競賽要求,結合所學知識,合理設計并改裝爬行機器人的足部結構。
2.2.4 ? ?環節4:拓展提高
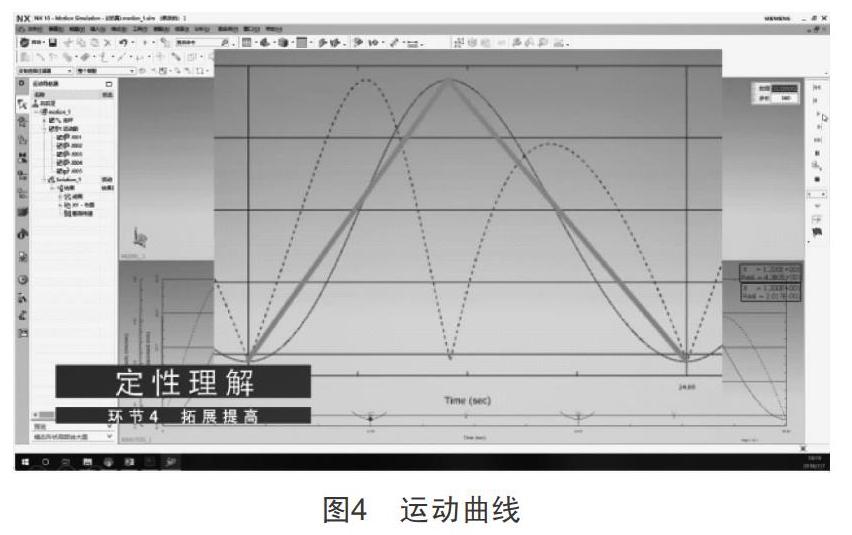
學生發現相同的時間內機器人前進與后退的行程并不一致,這是曲柄搖桿機構的急回特性所決定的。由于機構在高速運行中的速度難以測量,在傳統教學過程中,急回特性的推導過程較為抽象,學生難于理解,注意力易分散。
針對上述教學難點,我們重新設計了教學過程。教師選擇一組學生的足部結構進行運動學分析。學生觀察搖桿實時位移與對應生成的運動曲線,發現v-t曲線波峰兩側的陡峭程度并不一致。學生借助已有的數學知識,判斷出兩個行程的平均速度不同,從而定性理解急回特性。編程控制機器人運行如圖3所示,生成的運動曲線如圖4所示。
2.2.5 ? ?環節5:總結評價
最后,學生在學習認證系統中進行總結、自評和互評,認證系統實時記錄學生各節點完成情況和評價數據,實現了跨學科、跨專業學習數據的互通和互認。
2.3 ? ?課后拓展
課后,學生進一步完善任務報告,發揮創新精神,為機器人設計不同工作條件下的行進機構方案,并預習機器人的拋擲機構。
3 結語
本課程以積木式機器人為載體,使書本上的機械機構變得可見、可觸、可實現。利用工業設計軟件,將抽象的幾何計算轉變為直觀的三維模型,實現了從傳統課堂向創客空間的轉變。積木式機器人構建了一個課程融合的平臺,為學生打下了學習工業機器人的基礎。UG軟件使學生可以快速改變設計,提高了教學效率。AutoCAD運動仿真將難以測量的抽象數據轉換為形象直觀的圖表,便于學生發現和總結規律。基于區塊鏈技術的分布式學習認證系統,使得學生在任何課程中完成的任務節點、完成情況、師生評價都能互通和互認,既方便學生調用和訪問知識節點,又為教師了解學情、組織教學活動提供了依據,更為學科融合搭建了橋梁。
[參考文獻]
[1] 劉艷,閆國棟,孟威,等.創新創業教育與專業教育的深度融合[J].中國大學教育,2014(11):21-22.
[2] 王益,張劍平.美國機器人教育的特點及其啟示[J].現代教育技術,2007(11):108-112.
[3] 北京開放大學地平線報告K12項目組.2017地平線報告:新技術驅動教學創新的趨勢、挑戰與策略[J].人民教育,2017(21):71-75.
[4] 高云峰,師保國.跨學科創新視角下創客教育與STEAM教育的融合[J].華東師范大學學報(教育科學版),2017,35(4):47-53.
[5] 曾祥潘.步入開源硬件智能機器人教育時代[J].中小學信息技術教育,2012(1):76-78.
收稿日期:2020-05-06
作者簡介:蔡舒旻(1982—),男,江蘇常州人,高級講師,工程碩士,研究方向:機械工程及自動化。
