基于神經(jīng)網(wǎng)絡(luò)的汽車電控發(fā)動(dòng)機(jī)故障診斷分析
2020-07-09 09:03:26于麗麗
粘接 2020年6期
關(guān)鍵詞:故障診斷


摘要:近年來,隨著電子控制技術(shù)的快速發(fā)展,傳統(tǒng)的汽車行業(yè)也引進(jìn)了電子控制技術(shù),極大改善了傳統(tǒng)汽車產(chǎn)品電動(dòng)發(fā)動(dòng)機(jī)存在的問題。電子控制技術(shù)在汽車中的應(yīng)用使得汽車電控系統(tǒng)越來越復(fù)雜,汽車電控發(fā)動(dòng)機(jī)發(fā)生故障時(shí),故障診斷變得更加的復(fù)雜。人工智能技術(shù)的日趨成熟,為汽車電控發(fā)動(dòng)機(jī)故障診斷提供了全新的診斷模式,通過搜集汽車電控發(fā)動(dòng)機(jī)典型故障,分析各種故障的特征,利用神經(jīng)網(wǎng)絡(luò)在模式識(shí)別上的優(yōu)勢,對故障特征進(jìn)行分析,提高汽車電控發(fā)動(dòng)機(jī)故障診斷的準(zhǔn)確性。
關(guān)鍵詞:神經(jīng)網(wǎng)絡(luò);電控發(fā)動(dòng)機(jī);故障診斷
中圖分類號:TP183;U472.9
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號:1001-5922(2020)06-0167-04
1 汽車電控發(fā)動(dòng)機(jī)故障診斷
1.1 汽車電控發(fā)動(dòng)機(jī)組成
近年來,隨著汽車行業(yè)的發(fā)展,汽車發(fā)動(dòng)機(jī)控制方式都已采用電動(dòng)控制的方式,通過電動(dòng)控制系統(tǒng)(簡稱電控系統(tǒng))完成發(fā)動(dòng)機(jī)燃油噴射、變量進(jìn)氣、速度控制、燃油噴射控制以及點(diǎn)火控制等功能[1]。電控發(fā)動(dòng)機(jī)作為當(dāng)今汽車發(fā)動(dòng)機(jī)的主流,電控發(fā)動(dòng)機(jī)技術(shù)的自動(dòng)化程度也體現(xiàn)了汽車行業(yè)自動(dòng)化程度的高低[2]。
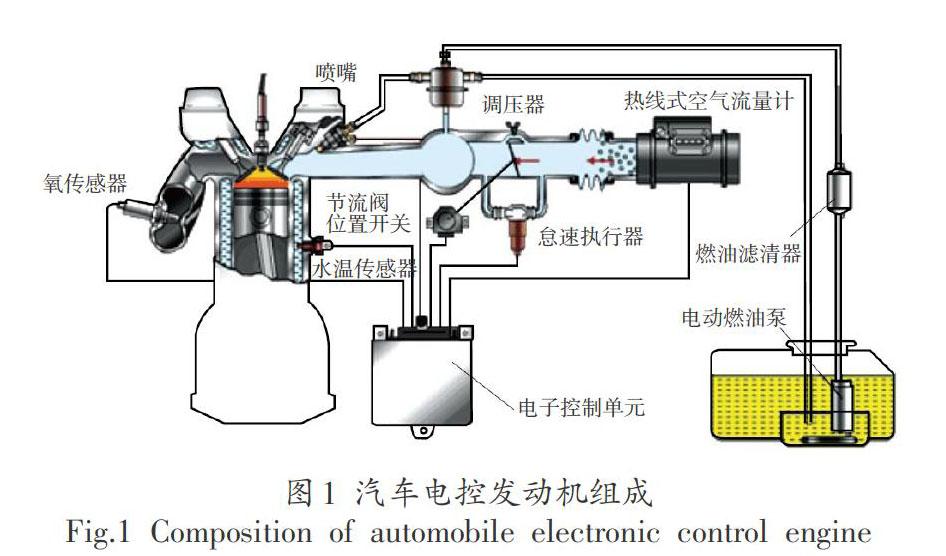
現(xiàn)代汽車電控系統(tǒng)主要由各類傳感器、電控芯片以及多個(gè)執(zhí)行器等部分組成,如圖1所示。發(fā)動(dòng)機(jī)正常工作需要各個(gè)部分協(xié)同工作,電控芯片向各個(gè)部分發(fā)送動(dòng)作指令,各個(gè)部分也將相關(guān)信息反饋到電控芯片中。汽車電控發(fā)動(dòng)機(jī)中的電子控制單元(ECU) -般具有故障自診斷的功能[3],汽車發(fā)動(dòng)機(jī)控制系統(tǒng)中的各傳感器實(shí)時(shí)將信號傳送到ECU中,ECU對接收的傳感器信號進(jìn)行判別,當(dāng)ECU檢測到來自傳感器和執(zhí)行器的故障信號時(shí),ECU將發(fā)送相關(guān)指令,汽車駕駛員操作面板上的故障指示燈將點(diǎn)亮,提醒駕駛員汽車發(fā)動(dòng)機(jī)出現(xiàn)故障。同時(shí)ECU也會(huì)發(fā)送故障代碼到控制器中,維修人員在檢修車輛時(shí),通過拷貝存儲(chǔ)器中的故障代碼,通過對代碼解析識(shí)別,從而判別故障發(fā)生位置,但人工檢修也會(huì)出現(xiàn)一些問題。
1.2 電控發(fā)動(dòng)機(jī)故障類型
汽車發(fā)動(dòng)機(jī)常見的故障類型主要有傳感器故障、執(zhí)行器故障以及相應(yīng)線路故障,各類故障的特征和相關(guān)參數(shù)不同。
汽車發(fā)動(dòng)機(jī)內(nèi)部的各項(xiàng)傳感器在正常工作時(shí),各個(gè)傳感器會(huì)向ECU發(fā)送應(yīng)的信號,所發(fā)送的信號都在各自相應(yīng)的范圍內(nèi),表1是發(fā)動(dòng)機(jī)在正常怠速下相關(guān)參數(shù),當(dāng)某傳感器出現(xiàn)故障時(shí),所發(fā)送的信號會(huì)超出正常范圍,當(dāng)ECU接收到超出正常范圍的信號時(shí)就會(huì)判定出該傳感器出現(xiàn)故障。
電控發(fā)動(dòng)機(jī)的執(zhí)行器發(fā)生故障時(shí),常常需要外接電路來監(jiān)測各執(zhí)行器的工作情況[4]。汽車執(zhí)行器故障相關(guān)線路發(fā)生故障時(shí),主要有線路接連處以及線路短路等情況。
2 人工神經(jīng)網(wǎng)絡(luò)
人工神經(jīng)網(wǎng)絡(luò)是一種模擬生物神經(jīng)網(wǎng)絡(luò)行為特征并執(zhí)行分布式并行信息處理的算法數(shù)學(xué)模型,該網(wǎng)絡(luò)由大量相互連接的內(nèi)部節(jié)點(diǎn)(神經(jīng)元)組成,每個(gè)節(jié)點(diǎn)輸出一個(gè)稱為激勵(lì)函數(shù)的特定函數(shù)。每兩個(gè)節(jié)點(diǎn)之間的連接由用于評估信號強(qiáng)度的值或權(quán)重表示[5]。根據(jù)系統(tǒng)的復(fù)雜性,可以通過調(diào)整網(wǎng)絡(luò)的結(jié)構(gòu)、網(wǎng)絡(luò)的連接方式、激勵(lì)函數(shù)和內(nèi)部節(jié)點(diǎn)之間的互連權(quán)重來實(shí)現(xiàn)信息處理的目的。人工神經(jīng)網(wǎng)絡(luò)技術(shù)因具有良好的自組織自學(xué)習(xí)能力,可模擬人思維根據(jù)輸入的樣本數(shù)據(jù)尋找輸入量與輸出量之間的復(fù)雜關(guān)系,具有非線性適應(yīng)性信息處理能力,在預(yù)測、控制領(lǐng)域等到了成功的應(yīng)用。
2.1 人工神經(jīng)網(wǎng)絡(luò)模型構(gòu)建
人工神經(jīng)網(wǎng)絡(luò)技術(shù)能夠模擬人腦處理信息的方式,利用大量數(shù)據(jù)訓(xùn)練影響因素與沉積量之間的非線性關(guān)系模型。該模型具有自學(xué)習(xí)和自適應(yīng)能力,并利用訓(xùn)練的模型根據(jù)新輸入的各影響因素對應(yīng)的參數(shù)值,經(jīng)過權(quán)值調(diào)節(jié)對沉積量進(jìn)行預(yù)測。人工神經(jīng)網(wǎng)絡(luò)是由多個(gè)神經(jīng)元組合模擬生物神經(jīng)元的一種數(shù)學(xué)模型,神經(jīng)元的結(jié)構(gòu)如圖2所示。
圖2中,∑表示該神經(jīng)元所有輸入量求和,O表示訓(xùn)練神經(jīng)網(wǎng)絡(luò)時(shí)設(shè)置的一定閾值,S,表示該神經(jīng)元的輸出,fi表示神經(jīng)元的輸出,{X1,X2,…,Xn}表示該神經(jīng)元的輸入,{w1f,W2f,…,Wnf}表示兩個(gè)神經(jīng)元相互連接作用時(shí)的權(quán)值,當(dāng){w1f,W2f,…,Wnf}的符號為正時(shí)表明神經(jīng)元處于興奮狀態(tài),否則則處于抑制狀態(tài)。f(·)表示神經(jīng)元激活函數(shù)。
神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)特殊功能的核心是算法[6],構(gòu)建的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)為誤差反向傳播(Error Back Propaga-tion,BP)神經(jīng)網(wǎng)絡(luò),經(jīng)過訓(xùn)練后的BP神經(jīng)網(wǎng)絡(luò)能獨(dú)立處理與輸入樣本相似的數(shù)據(jù),并以最小的輸出誤差對輸人數(shù)據(jù)進(jìn)行非線性變化,BP神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖3所示。
所構(gòu)建的誤差反向傳播(BP)神經(jīng)網(wǎng)絡(luò)主要包含輸入層、隱含層和輸出層,其中輸入層神經(jīng)元的輸入量以汽車發(fā)動(dòng)機(jī)傳感器的各項(xiàng)數(shù)據(jù)作為輸入量,相應(yīng)故障作為輸出層神經(jīng)元的輸出量。輸入層神經(jīng)元與輸出層神經(jīng)元之間采用隱含層相連,各層神經(jīng)元之間的傳遞函數(shù)如下[7]:
2.2 神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練
BP神經(jīng)網(wǎng)絡(luò)模型的訓(xùn)練包括正向和反向過程,其中正向訓(xùn)練利用樣本數(shù)據(jù),樣本數(shù)據(jù)作為為輸入層神經(jīng)元輸入相應(yīng)參數(shù),經(jīng)過隱含層計(jì)算后輸出,通過比較輸出量與理論值之間的偏差,如果偏差滿足設(shè)定的閾值,則訓(xùn)練結(jié)束,若不滿足,則將誤差值反向傳播,調(diào)整各層神經(jīng)元之間權(quán)值和偏置值,直到誤差滿足相應(yīng)要求停止。
神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練需要大量的樣本數(shù)據(jù),訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型的樣本數(shù)據(jù)主要來自于實(shí)驗(yàn)[8]。通過實(shí)驗(yàn)收集大量汽車電動(dòng)發(fā)動(dòng)機(jī)故障特征,并分析相關(guān)參數(shù)作為樣本數(shù)據(jù)。表2是將樣本數(shù)據(jù)作為神經(jīng)網(wǎng)絡(luò)的輸入量,經(jīng)過神經(jīng)網(wǎng)絡(luò)訓(xùn)練學(xué)習(xí)后的輸出。
3 實(shí)驗(yàn)
為驗(yàn)證神經(jīng)網(wǎng)絡(luò)模型在汽車電控發(fā)動(dòng)機(jī)故障診斷方面的準(zhǔn)確性與靈敏度,通過收集了十二組故障數(shù)據(jù),每組數(shù)據(jù)包括氧氣、冷卻水溫、發(fā)動(dòng)機(jī)轉(zhuǎn)速數(shù)據(jù)、節(jié)氣門開度、進(jìn)氣溫度、點(diǎn)火提前角、噴嘴噴射油時(shí)間、空燃比閉環(huán)狀態(tài)、進(jìn)氣傳感器壓力以及發(fā)動(dòng)機(jī)負(fù)荷數(shù)據(jù)。每一個(gè)傳感器收集六組數(shù)據(jù),其中一組待檢測的數(shù)據(jù)如表3所示。
通過神經(jīng)網(wǎng)絡(luò)模型診斷后,輸出結(jié)果如表4所示。
通過表中數(shù)據(jù)可以看出,實(shí)際輸出結(jié)果與神經(jīng)網(wǎng)絡(luò)模型診斷的結(jié)果一直,神經(jīng)網(wǎng)絡(luò)模型的精度較高,在汽車電控發(fā)動(dòng)機(jī)故障領(lǐng)域有一定的應(yīng)用前景。
4 結(jié)語
通過神經(jīng)網(wǎng)絡(luò)分析電控發(fā)動(dòng)機(jī)故障數(shù)據(jù)來判斷汽車故障的方法,能夠根據(jù)電控發(fā)動(dòng)機(jī)的相關(guān)數(shù)據(jù),分析數(shù)據(jù)準(zhǔn)確的找到故障位置,并診斷故障原因,該方法較人為的檢測在精度上有了很大的提高,提高了工作效率。
參考文獻(xiàn)
[1]《中國公路學(xué)報(bào)》編輯部,中國汽車工程學(xué)術(shù)研究綜述[J].中國公路學(xué)報(bào).2017,30(06):1-197.
[2]王禮軍.模糊神經(jīng)網(wǎng)絡(luò)專家系統(tǒng)在發(fā)動(dòng)機(jī)故障診斷中的應(yīng)用研究[D].重慶:重慶交通大學(xué),2012.
[3]李國勇,電控汽油機(jī)智能控制策略及故障診斷的研究[D].太原:太原理工大學(xué),2007.
[4]屋德畢李格,基于波形分析法的電噴汽油機(jī)故障診斷研究[D].西安:長安大學(xué),2005.
[5]李守巨.基于計(jì)算智能的巖土力學(xué)模型參數(shù)反演方法及其工程應(yīng)用[D].大連:大連理工大學(xué),2004.
[6] Khosravi A, Koury R N N,Machado L,et al.Predic-tion of wind speed and wind direction using artificialneural network, support vector regression and adaptiveneuro- fuzzy inference system[J].Sustainable EnergyTechnologies and Assessments, 2018, 25: 146-160.
[7] Al- Ghobari,H M, El- Marazky,M S,Dewidar,A Z,et al.Prediction of wind drift and evaporation losses fromsprinkler irrigation using neural network and multiple re-gression techniques[J].Agricultural Water Manage-ment.2018, 195: 211-221.
[8] Wen,S.;Zhang,Q.;Yin,X.;et al.Design of Plant Pro-tection UAV Variable Spray System Based on NeuralNetworks.Sensors 2019, 19, 1112.
作者簡介:于麗麗(1989-),女,江蘇徐州人,碩士研究生,講師,主要研究方向:汽車服務(wù)工程。
猜你喜歡
一重技術(shù)(2021年5期)2022-01-18 05:42:10
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
制造技術(shù)與機(jī)床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術(shù)與機(jī)床(2017年10期)2017-11-28 05:20:43
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動(dòng)工程學(xué)報(bào)(2014年2期)2014-03-01 01:15:22
振動(dòng)、測試與診斷(2014年5期)2014-03-01 01:14:21
振動(dòng)、測試與診斷(2014年4期)2014-03-01 01:14:00