基于STC15W4K56S4單片機控制的管道內鋼珠運動測量裝置設計
2020-07-09 22:13:09張仁朝王先彪張茂貴
現代信息科技 2020年2期
張仁朝 王先彪 張茂貴
摘? 要:文章設計了一種基于STC15W4K56S4單片機控制的管道內鋼珠運動測量裝置。該裝置采用霍爾傳感器測量鋼珠運動參數,通過鋼珠在管道內的運動特點建立數學模型,利用數學模型實現對鋼珠個數、運動方向、角度、周期的測量,通過標定法減小系統誤差,并在12864LCD上進行顯示。該裝置可以較好地完成鋼珠數量與運動方向顯示,并且將傾斜角度誤差的絕對值在誤差范圍之內。
關鍵詞:單片機;運動;測量;顯示
中圖分類號:TP368.1? ? ? ?文獻標識碼:A 文章編號:2096-4706(2020)02-0041-04
Abstract:In this paper,a steel ball motion measuring device in pipeline is designed based on STC15W4K56S4 single chip microcomputer. The device uses Hall sensor to measure the movement parameters of steel balls,establishes the mathematical model through the movement characteristics of steel balls in the pipeline,realizes the measurement of the number of steel balls,movement direction,angle and period by using the mathematical model,reduces the system error by the calibration method,and displays on 12864LCD. The device can display the number of steel balls and the direction of movement well,and the absolute value of the tilt angle error is within the error range.
Keywords:SCM;motion;measure;display
0? 引? 言
角度測量在我們日常生活中的應用非常廣泛。測量一個運動物體角度的方法除了角度傳感器,應用比較多的就是霍爾傳感器。通過霍爾傳感器,單片機控制液晶顯示運動物體的數量與角度,是角度測量的另一有效措施。
1? 系統方案設計
本文計劃設計并制作一個管道內鋼珠運動測量裝置,使用2個非接觸傳感器檢測鋼珠運動,配合信號處理和顯示電路獲得鋼珠的運動參數。
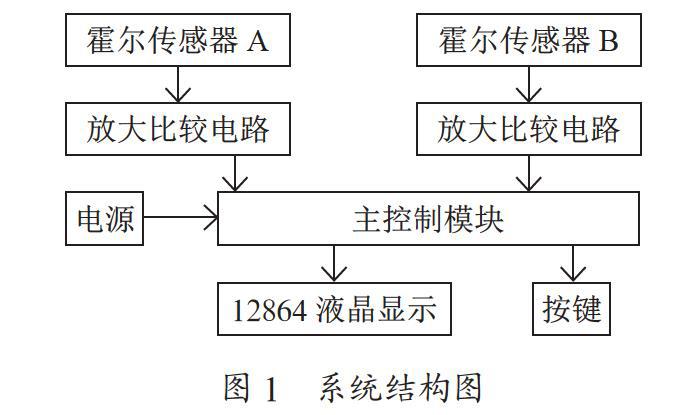
根據以上要求,本系統主要由傳感器模塊、主控制模塊 (MCU)、放大電路模塊、比較電路模塊、液晶顯示模塊、按鍵模塊、電源模塊構成。其系統結構如圖1所示。
2? 方案論證與選擇
2.1? 傳感器的選擇
2.1.1? 霍爾傳感器
霍爾效應是指磁場作用于導體的載流子產生橫向電位差的物理現象。當電流通過霍爾元件時,垂直于電流的方向放置磁鐵施加磁場,則霍爾元件兩側面會出現橫向電位差(即稱為霍爾電壓),因為鋼珠滾過管道引起霍爾傳感器的磁場變化,所以霍爾元件將磁場的變化轉為電信號傳輸給控制器來處理,從而實現測速和測長度等。霍爾傳感器在實際測試中精確度高、靈敏度高、可靠性高、穩定性好。
2.1.2? 光電傳感器
光電傳感器是通過把光強度的變化轉換成電信號的變化來實現控制。將燈安裝在管道一側,光電傳感器安裝在另一側,當鋼珠經過管道,光信號轉換成電信號,并獲得鋼珠運動系數。管道的管壁較厚,光電傳感器不易檢測到鋼珠。
2.1.3? 電感式傳感器
當鋼珠穿過管道,電感式傳感器利用電磁感應獲得鋼珠運動軌跡,再由電感式傳感器轉換為電信號輸送給控制器。電感式傳感器精確度高、靈敏度高,但在管壁上不好安裝。
綜合考慮,選擇使用霍爾傳感器。
2.2? 主控制器的選擇
2.2.1? STC15W4K56S4
STC15W4K56S4運算速度比傳統的8051單片機快7~12倍,存儲空間大。具有超高速四串口/UART,分時切換可當9組串口使用,功能基本滿足系統要求。
2.2.2? STC89C52
STC89C52是一種低功耗、高性能的8位CMOS微控制器,具有8 K字節系統可編程Flash存儲器,可直接使用串口下載,但運算速度較慢且存儲空間較小。
2.2.3? STM8
其內核為高級STM8內核,具有8 K字節Flash程序存儲器。抗干擾能力強,系統成本低。
綜合考慮,選擇STC15W4K56S4芯片。
3? 鋼珠運動與工作原理
將霍爾傳感器安裝在管道一側,在管道另一側放置磁鐵形成磁場。當鋼珠經過管道,霍爾傳感器的磁場出現變化,形成電位差,霍爾元件再將信號傳送給單片機進行處理。根據鋼珠在管道內的運動特點,建立數學模型。
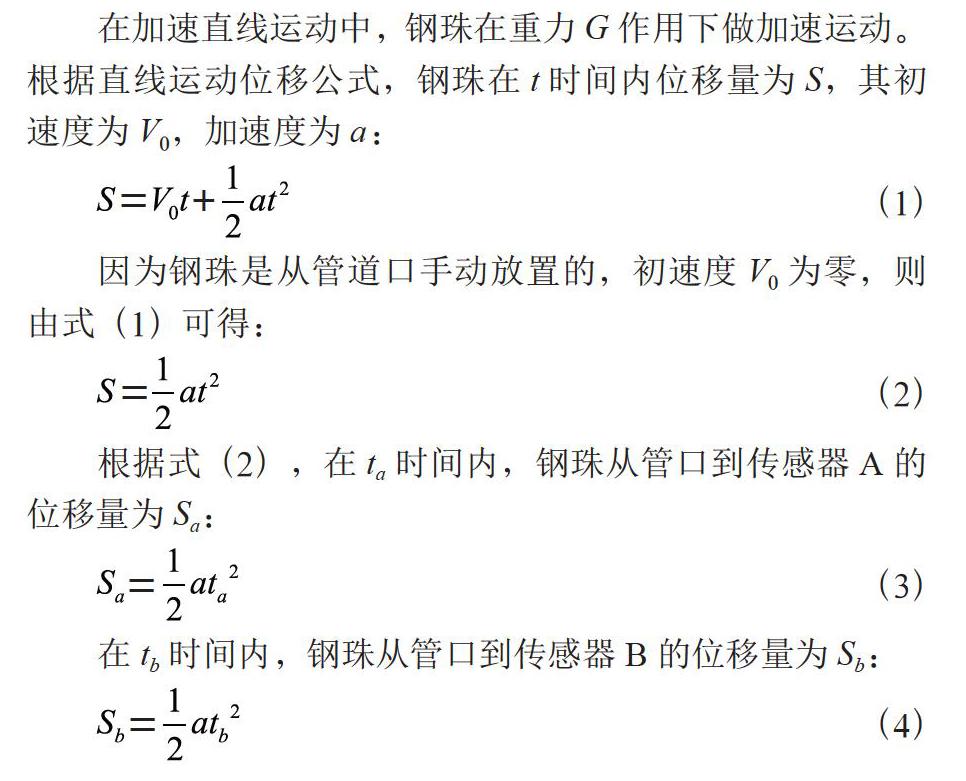
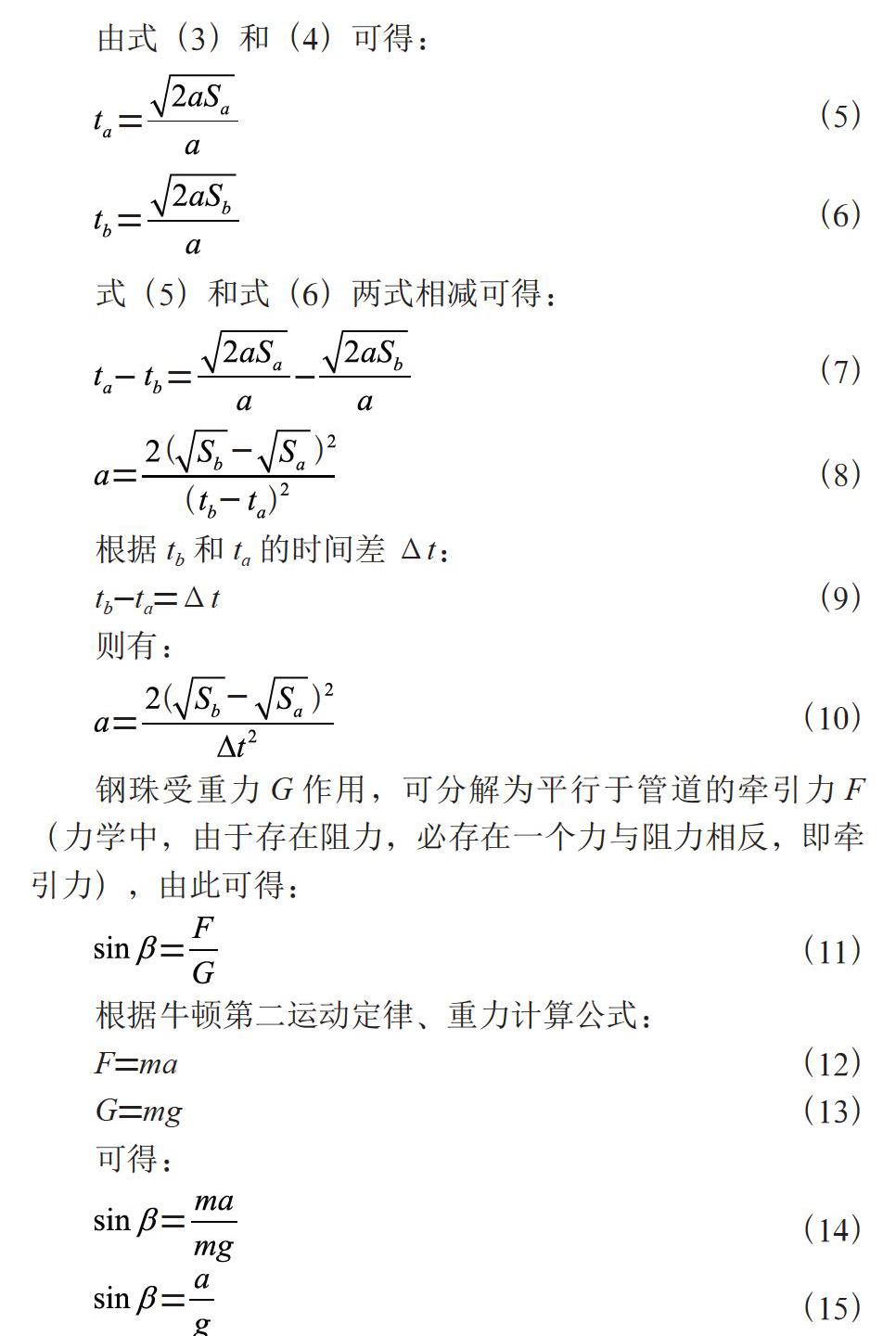
在加速直線運動中,鋼珠在重力G作用下做加速運動。根據直線運動位移公式,鋼珠在t時間內位移量為S,其初速度為V0,加速度為a:
實際測量中,除了存在摩擦力(摩擦因數很小,可忽略不計)造成的誤差之外,還有在移動傳感時,兩個傳感器之間的距離和管口到兩個傳感器的距離會產生誤差。除此之外還有霍爾傳感器探測精度的誤差。
為了減小誤差,我們采用標定法。即先設定好傳感器A與傳感器B之間的距離并且鍵入Sa、Sb,再確定管道角度(例如45°或60°),放置小球后,通過測出的角度與實際角度對比,手動調整傳感器A與傳感器B之間的距離。通過矯正,減小系統誤差。
4? 電路設計
4.1? 放大比較模塊
霍爾傳感器輸出的電信號經過放大電路進行100倍放大后,用比較器進行比較,輸出到單片機,如圖2所示。
4.2? 電源模塊
將220 V交流電經過變壓器轉為12 V直流電,再由電源模塊進行整流、濾波、輸出穩定的5 V直流電,給系統供電,如圖3所示。
4.3? 按鍵電路
由3×4矩陣組成按鍵電路,配合程序進行數值鍵入、清零等功能,如圖4所示。
4.4? 顯示模塊
本模塊采用128×64LED點陣顯示。帶中文字庫的128× 64具有4位/8位并行、2線或3線串行多種接口方式,可以顯示8×4行16×16點陣的漢字。也可完成圖形顯示,低電壓、低功耗是其顯著特點。
5? 軟件設計
主程序流程圖如圖5所示。主程序通過按鍵進行功能切換,顯示鋼珠的個數、計算角度與運動的方向。
6? 測試結果與分析
測試儀器:量尺、量角器、秒表。測試結果如表1、表2所示。
其中,S1、S2為管口分別到傳感器A和傳感器B的距離。間距為傳感器A與傳感器B之間的距離。
從表1可以看出,基本要求中的鋼珠個數、鋼珠運動方向、鋼珠運動周期的測試結果完全正確,符合基本要求中的測量指標。從表2的角度測量表可以看出,10°到60°的角度誤差在1°內,60°到80°角度測量的誤差在2°內,整個測量的角度誤差都在3°內,并且能夠準確地顯示出來,符合題目發揮部分設計的要求。
7? 結? 論
本文設計的管道內鋼珠運動測量裝置,來源于全國大學生電子設計競賽試題。該裝置以STC15W4K56S4單片機為核心,經過實際測試,能夠準確測量鋼珠個數、運動方向與周期,并能顯示管道的角度。角度的誤差在允許范圍之內,且管道支架牢固、系統穩定,較好地完成了試題的要求。
參考文獻:
[1] 李艷紅,李海華,楊玉蓓.傳感器原理及實際應用 [M].北京:清華理工大學出版社,2016.
[2] 李紅萍,李泉,李金明,等.基于AVR128的管道內鋼珠運動測量裝置設計 [J].蘭州石化職業技術學院學報,2018,18(3):16-18.
[3] 唐金元,王翠珍.角度信號測量儀的設計與實現 [J].國外電子測量技術,2009,28(3):38-41.
[4] 曹建安,張樂平,吳昊,等.采用傾角傳感器實現空間旋轉角度測量的解析方法研究 [J].西安交通大學學報,2013,47(10):109-114.
[5] 舒望.基于光電編碼器的旋轉角度測量裝置的研究與設計 [J].儀表技術,2015(7):31-33.
[6] 斯蕓蕓,景琴琴,郭虎.基于IAP15W4K58S4單片機的管道內鋼珠運動測量裝置研究 [J].河北農機,2019(3):58.
[7] 蘆寶娟.基于STC12C5A60S2單片機鋼珠運動測量裝置設計 [J].電子測試,2019(11):43-44.
[8] 劉佳,柴浩元.小球滾動控制系統的設計與實現 [J].山西電子技術,2017(2):21-24.
[9] 劉永鋒.基于STC15單片機的管道內鋼珠運動測量裝置設計與實現 [J].山西電子技術,2018(6):37-38+48.
[10] 黃志偉.全國大學生電子設計競賽訓練教程 [M].北京:電子工業出版社,2005.
作者簡介:張仁朝(1982-),男,漢族,安徽淮北人,高級實
驗師,碩士,本科,研究方向:單片機技術應用、實訓教學與管理。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21