汽車制動(dòng)控制系統(tǒng)ABS/EBD設(shè)計(jì)與仿真
2020-07-13 11:02:52王健楊君于蓬鄭金鳳
山東交通學(xué)院學(xué)報(bào) 2020年2期
王健,楊君,于蓬,鄭金鳳
1.山東交通學(xué)院汽車工程學(xué)院,山東濟(jì)南 250357;2.山東明宇新能源技術(shù)有限公司,山東濟(jì)南 271100
0 引言
汽車緊急制動(dòng),特別是在附著系數(shù)較低的路面上緊急制動(dòng)時(shí),汽車防抱死制動(dòng)系統(tǒng)(anti-locked braking system,ABS)可以防止前后車輪抱死拖滑,在保證汽車具有轉(zhuǎn)向功能的同時(shí),防止汽車不發(fā)生甩尾側(cè)滑等危險(xiǎn)情況,保持汽車的制動(dòng)穩(wěn)定性,且可以縮短制動(dòng)距離[1-3]。電子制動(dòng)力分配(electronic brake force distribution,EBD)系統(tǒng)作為ABS的子系統(tǒng),可以在車輛制動(dòng)時(shí)控制制動(dòng)力在各輪間的分配,更好地利用各輪的附著系數(shù)[4-11]。
國(guó)內(nèi)大多數(shù)ABS采用邏輯門限值控制,通過(guò)大量試驗(yàn)確定各門限值,對(duì)系統(tǒng)的控制很不穩(wěn)定[12-14]。本文ABS采用滑模變結(jié)構(gòu)控制,該方法是針對(duì)非線性和參數(shù)不確定性系統(tǒng)的控制方法[15-17],具有很好的魯棒性。EBD系統(tǒng)采用模糊控制,該方法對(duì)系統(tǒng)中的參數(shù)變化、外界干擾、系統(tǒng)非線性等具有很強(qiáng)的魯棒性。通過(guò)建立1/2車輛動(dòng)力學(xué)模型、設(shè)計(jì)基于滑模變結(jié)構(gòu)控制的ABS控制器和基于模糊控制的EBD控制器,在不同路面上進(jìn)行ABS/EBD系統(tǒng)的仿真驗(yàn)證,以期提高車輛的制動(dòng)性能。
1 車輛動(dòng)力學(xué)模型
為了設(shè)計(jì)ABS、EBD控制器以及進(jìn)行系統(tǒng)動(dòng)力學(xué)仿真,需建立車輛動(dòng)力學(xué)模型。為便于建模,對(duì)車輛動(dòng)力學(xué)模型進(jìn)行簡(jiǎn)化:1)忽略路面不平度的影響;2)忽略空氣阻力和輪胎滾動(dòng)阻力;3)忽略傳動(dòng)系、轉(zhuǎn)向系和懸架系統(tǒng)的影響;4)假設(shè)汽車只有縱向運(yùn)動(dòng),無(wú)側(cè)向和垂直方向運(yùn)動(dòng)。
建立1/2車輛動(dòng)力學(xué)模型,如圖1所示,車輛參數(shù)如表1所示。

圖1 車輛動(dòng)力學(xué)模型
表1 車輛參數(shù)
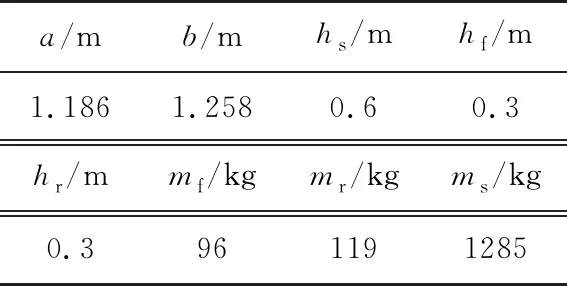
a/mb/mhs/mhf/m1.1861.2580.60.3hr/mmf/kgmr/kgms/kg0.3961191285
圖1中:a、b分別為質(zhì)心至前、后軸的距離,hs為簧上質(zhì)量質(zhì)心高度,hf、hr分別為前、后簧下質(zhì)量質(zhì)心高度,mf、mr分別為前、后簧下質(zhì)量,ms為車輛簧上質(zhì)量,F(xiàn)zf、Fzr分別為地面對(duì)前、后輪的垂直載荷,F(xiàn)tf、Ftr分別為前、后輪的地面制動(dòng)力。
由車輛動(dòng)力學(xué)模型可得:
(1)

基于滑模變結(jié)構(gòu)控制的ABS的主要控制目標(biāo)為前、后車輪的滑移率
(2)
式中ωf、ωr分別為前、后輪的角速度。
2 ABS滑模變結(jié)構(gòu)控制器設(shè)計(jì)
為了提高控制器的魯棒性,采用滑模變結(jié)構(gòu)控制設(shè)計(jì)ABS控制器。滑模變結(jié)構(gòu)通過(guò)控制汽車前后輪的制動(dòng)力矩[18-19],使汽車前后輪滑移率跟蹤理想滑移率,保持車輪滑移率在最佳滑移率附近,從而充分利用路面附著系數(shù)[20-21]。首先定義滑模變結(jié)構(gòu)控制的車輪滑移率跟蹤誤差
(3)
式中:S1、S2分別為前后輪滑移率跟蹤誤差;λfd、λrd分別為前、后輪理想滑移率。
令
(4)
(5)
(6)
對(duì)式(3)兩邊分別求導(dǎo)數(shù),并令S1、S2的導(dǎo)數(shù)為0,結(jié)合式(1)可以得到前后輪等效控制制動(dòng)力矩
(7)
由式(4)知:當(dāng)μf=μr=1時(shí),f1取最小值;當(dāng)μf=μr=0時(shí),f1取最大值,即:
-g≤f1≤0
,
(8)

由式(4)(5)可知:當(dāng)μf=0時(shí),f2取最小值;當(dāng)f1=-g時(shí),μf=μr=1、m1和m3取最大值時(shí),f2取最大值,即:
(9)
式中:m1+、m3+分別為m1、m3的最大值,m1-、m3-分別為m1、m3的最小值。
由式(6)知:當(dāng)f1=0、μr=1、m2=m2+時(shí),f3取最大值;若m2-≤m3+,則f3可取負(fù)值也可取零。即:
(10)
式中:m2-、m2+分別為m2的最小值、最大值。

為得到最佳的控制制動(dòng)力矩,式(8) ~(10)中的f1、f2和f3用其近似值來(lái)表示,結(jié)合式(7)可以得到較為精確的等效控制制動(dòng)力矩
(11)
為了保證滑模面的收斂性,需滿足關(guān)系式
(12)
式中k1、k2為常數(shù)。
ABS滑模變結(jié)構(gòu)控制器輸出控制前后輪的制動(dòng)力矩
(13)
式中k3、k4為常數(shù)。
由式(11)~(13)可以得前后輪控制力矩
(14)

F1=0.5g,
由于滑膜控制的前后輪控制力矩中存在不連續(xù)函數(shù)sign,制動(dòng)控制過(guò)程中易發(fā)生抖動(dòng),本文采用積分法消除抖動(dòng)。定義積分滑模控制的前后輪滑移率跟蹤誤差
(15)
式中α1、α2為常數(shù)。
基于式(15),重復(fù)上述求解滑模變結(jié)構(gòu)控制器輸出的前后輪制動(dòng)力矩計(jì)算過(guò)程,用穩(wěn)態(tài)函數(shù)sat(S)取代不連續(xù)函數(shù)sign(S),由式(14)得到ABS控制器輸出的前后輪制動(dòng)力矩
(16)
式中φ1、φ2為常數(shù)。
3 EBD模糊控制器設(shè)計(jì)
EBD系統(tǒng)可以通過(guò)調(diào)節(jié)后輪輪缸壓力,使后輪滑移率跟蹤前輪滑移率,保證前后車輪能夠同時(shí)抱死[22-24]。其模糊控制器的設(shè)計(jì)主要包括:模糊化、模糊推理和反模糊化。模糊控制采用雙輸入單輸出二維模糊控制系統(tǒng),2個(gè)輸入變量分別為前后輪滑移率的差值e和前后輪滑移率差值的變化率ec,輸出為后輪目標(biāo)輪缸壓力增量u。
模糊控制器輸入和輸出變量的模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},其中PB、PM、PS分別表示正大、正中和正小;NB、NM、NS分別表示負(fù)大、負(fù)中和負(fù)小;ZO表示零。e、ec、u的論域分別為[-0.1,0.1]、[-0.8,0.8]、[-1,1]。輸入和輸出變量的隸屬度函數(shù)均采用三角隸屬函數(shù),如圖2~4所示。

圖2e的隸屬函數(shù) 圖3 ec的隸屬函數(shù) 圖4 u的隸屬函數(shù)
e、ec分別有7個(gè)隸屬函數(shù),模糊控制規(guī)則有49條,采用 if A and B, then C的Mamdani模糊推理系統(tǒng),表2為模糊控制器的模糊規(guī)則。
由表2可知:
ifeis NB, andecis NB, thenuis NB,
ifeis NS, andecis ZO,thenuis NS,
……
ifeis PB, andecis PM, thenuis PB。

表2 模糊控制規(guī)則
本文的模糊推理通過(guò)MATLAB的模糊邏輯工具箱實(shí)現(xiàn),采用Mamdani最小推理法。反模糊化的方法有許多,本文采用重心反模糊法。
4 ABS/EBD系統(tǒng)仿真
為了驗(yàn)證本文建立的ABS、EBD控制器的控制效果,利用MATLAB/Simulink軟件進(jìn)行ABS滑模控制器與EBD模糊控制器的仿真試驗(yàn)驗(yàn)證。
4.1 ABS仿真
利用表1中參數(shù)在Simulink軟件中建立車輛1/2模型,設(shè)定汽車在開(kāi)始制動(dòng)時(shí)的初始車速為30 m/s,假定在輪胎滑移率λ=0.2時(shí)取得最大地面縱向制動(dòng)力,整個(gè)制動(dòng)過(guò)程中汽車沿直線前進(jìn)。
汽車以30 m/s的初速度在干瀝青路面上進(jìn)行直線制動(dòng)時(shí),仿真結(jié)果如圖5、6所示。其中圖5為制動(dòng)過(guò)程中前、后輪滑移率與理想滑移率誤差的變化曲線,圖6為制動(dòng)過(guò)程中前、后輪制動(dòng)力矩的變化曲線。

a)前輪 b)后輪
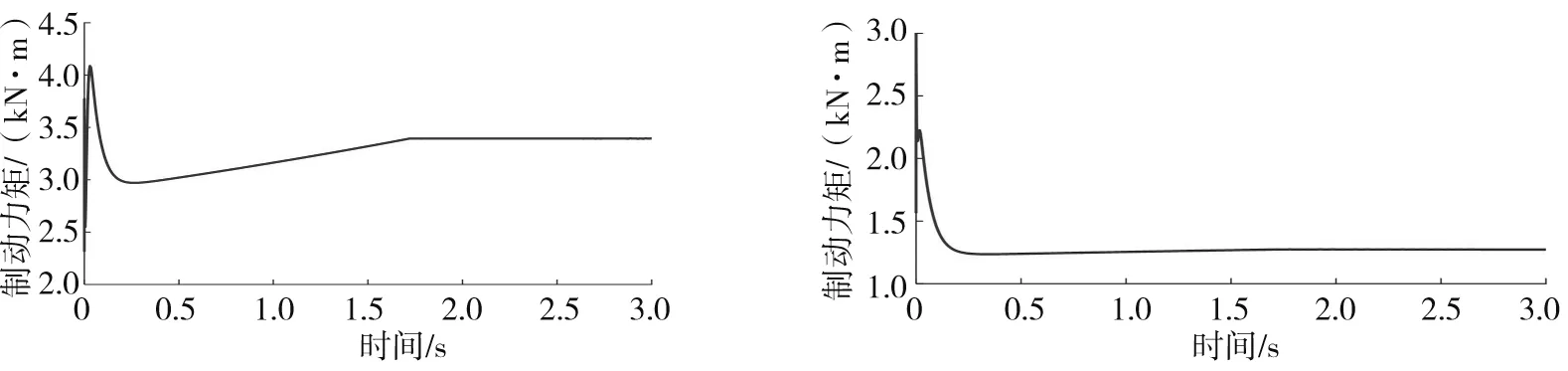
a)前輪 b)后輪
由圖5、6可以看出:ABS滑模控制器能夠控制前后輪實(shí)際滑移率跟蹤理想滑移率曲線的變化,控制誤差在±0.010以內(nèi)。制動(dòng)時(shí)質(zhì)心前移,前輪實(shí)際制動(dòng)力矩大于后輪制動(dòng)力矩,能防止后輪先于前輪抱死。
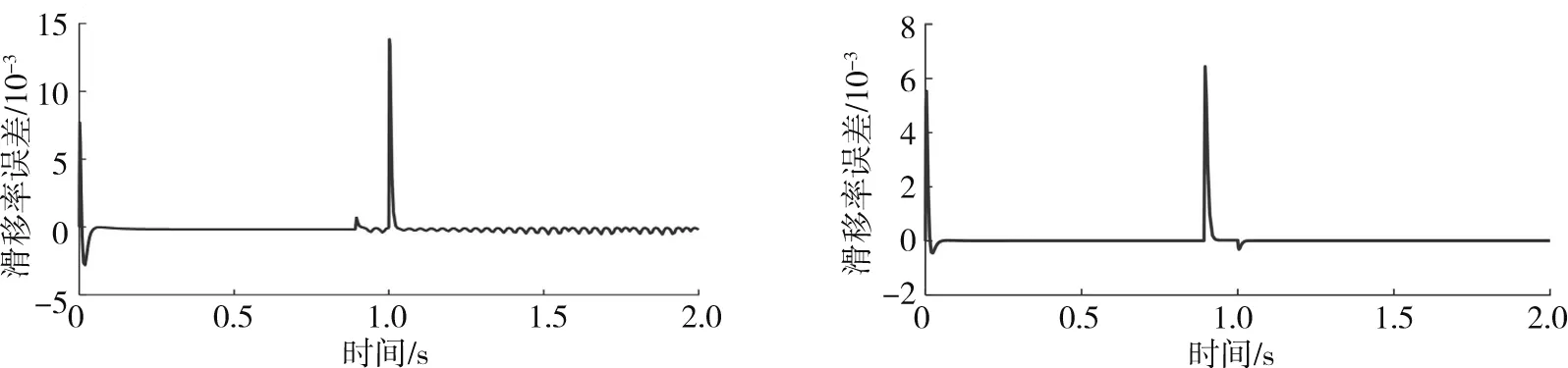
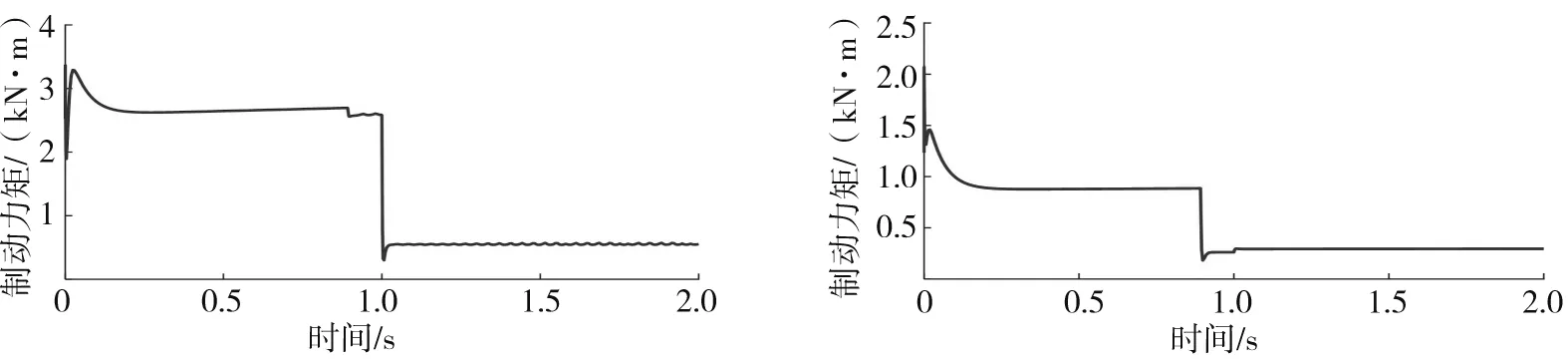
為進(jìn)一步驗(yàn)證滑模變結(jié)構(gòu)控制的效果,使汽車在不同的路面上進(jìn)行制動(dòng)仿真。汽車制動(dòng)初始速度為30 m/s,第一秒行駛在濕瀝青路面、第二秒行駛在雪路面。圖7為前后輪滑移率與理想滑移率誤差的變化曲線;圖8為制動(dòng)過(guò)程中前后輪制動(dòng)力矩的變化曲線。
a)前輪 b)后輪
a)前輪 b)后輪
由圖7、8可以看出:汽車在濕、雪路面上制動(dòng)時(shí),ABS滑模控制器能夠控制前后輪滑移率跟蹤理想滑移率,控制前輪滑移率誤差在±0.015以內(nèi),后輪滑移率誤差在±0.010以內(nèi)。前輪實(shí)際制動(dòng)力矩大于后輪,能夠防止后輪先于前輪抱死拖滑。
4.2 EBD系統(tǒng)仿真
為驗(yàn)證本文建立的EBD控制器的有效性,假定汽車制動(dòng)時(shí)初始車速為30 m/s,在干、濕瀝青路面上汽車前輪輪缸壓力以6 MPa/s遞增,前后輪制動(dòng)器制動(dòng)力分配曲線如圖9所示。
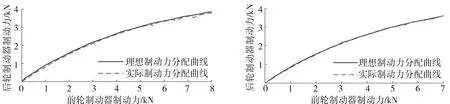
a)干瀝青路面 b)濕瀝青路面
由圖9可以看出:EBD控制器可以動(dòng)態(tài)調(diào)整前后輪制動(dòng)器制動(dòng)力的分配,使實(shí)際制動(dòng)力分配曲線跟蹤理想制動(dòng)力分配曲線,保證制動(dòng)初期充分利用地面制動(dòng)力。
4.3 ABS/EBD系統(tǒng)仿真
汽車制動(dòng)初始速度為30 m/s,假定制動(dòng)開(kāi)始汽車即進(jìn)入EBD控制,當(dāng)前后車輪滑移率達(dá)0.2時(shí),ABS開(kāi)始控制汽車的制動(dòng)過(guò)程直至停車,分別進(jìn)行干、濕瀝青路面的制動(dòng)仿真。圖10為干、濕瀝青路面上汽車制動(dòng)過(guò)程中前后輪的滑移率曲線,圖11為干、濕瀝青路面上汽車制動(dòng)過(guò)程中的制動(dòng)力矩曲線。

a)干瀝青路面 b)濕瀝青路面

a)干瀝青路面 b)濕瀝青路面
由圖10、11可以看出:制動(dòng)初期前后輪滑移率達(dá)0.2之前,EBD系統(tǒng)介入控制,前后輪制動(dòng)力矩按照理想制動(dòng)力矩分配曲線變化,后輪滑移率跟蹤前輪滑移率變化;當(dāng)滑移率達(dá)到0.2時(shí),EBD系統(tǒng)退出,ABS系統(tǒng)介入控制,前后輪滑移率保持最佳滑移率,防止前后車輪抱死拖滑,提高制動(dòng)效率;整個(gè)制動(dòng)過(guò)程中前輪制動(dòng)力矩始終大于后輪制動(dòng)力矩,防止后輪先于前輪抱死拖滑的危險(xiǎn)工況發(fā)生。
5 結(jié)論
1)ABS滑模變結(jié)構(gòu)控制器能夠?qū)④囕v制動(dòng)時(shí)前后車輪的滑移率維持在理想滑移率附近,采用積分滑模控制能很好地解決滑模變結(jié)構(gòu)控制中的抖動(dòng)問(wèn)題。
2)EBD模糊控制器可以隨時(shí)調(diào)整前后輪制動(dòng)器制動(dòng)力的分配,使前后輪制動(dòng)器制動(dòng)力曲線接近于理想制動(dòng)器制動(dòng)力曲線,保證車輛制動(dòng)時(shí)的穩(wěn)定性。
3)ABS/EBD系統(tǒng)在干、濕瀝青路面上制動(dòng)的聯(lián)合仿真表明,整個(gè)制動(dòng)過(guò)程中車輛的穩(wěn)定性好,驗(yàn)證了本文設(shè)計(jì)的ABS/EBD系統(tǒng)控制器的有效性。
猜你喜歡
建材發(fā)展導(dǎo)向(2022年23期)2022-12-22 07:30:00
汽車與安全(2019年9期)2019-11-22 09:48:03
工程與建設(shè)(2019年2期)2019-09-02 01:34:18
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
鑿巖機(jī)械氣動(dòng)工具(2017年3期)2017-11-22 07:21:44
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
河南科技(2014年11期)2014-02-27 14:09:53
城市道橋與防洪(2014年4期)2014-02-27 07:25:49
城市道橋與防洪(2013年8期)2013-03-11 15:18:33