空間機(jī)器人機(jī)械臂避障工作空間的研究
2020-07-14 15:31:41李亞云張大偉
中小企業(yè)管理與科技·上旬刊 2020年5期
李亞云 張大偉

【摘? 要】避障工作空間(obstacle avoiding planning workspace,縮寫為OAPW,簡(jiǎn)稱避障空間)的研究是機(jī)器人路徑規(guī)劃過(guò)程中一個(gè)至關(guān)重要的問(wèn)題。論文首先利用DH參數(shù)建立了空間機(jī)器人機(jī)械臂,其次工作空間與障礙物的模型建立采用了蒙特卡羅方法。然后描述了避障工作空間建立的方法。最后,仿真出三維空間內(nèi)的避障空間模型。
【Abstract】Research on obstacle avoiding planning workspace (abbreviated as OAPW) is a crucial issue in robot path planning process. This paper firstly establishes the space robot robotic arm by using the DH parameter. Secondly, Monte Carlo method is used to establish the model of the working space and obstacles. Then, this paper describes the method of establishing obstacle avoidance workspace. Finally, this paper simulates the obstacle avoidance space model in three-dimensional space.
【關(guān)鍵詞】操作臂;工作空間;避障空間;路徑規(guī)劃
【Keywords】operation arm; working space; obstacle avoidance space; path planning
【中圖分類號(hào)】TP242? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻(xiàn)標(biāo)志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章編號(hào)】1673-1069(2020)05-0163-03
1 引言
機(jī)器人機(jī)械臂末端可達(dá)到的點(diǎn)構(gòu)成了工作空間,記作WR,表示為:
WR={p(q):q∈Q}?奐Rn? ?(1)
式中,運(yùn)動(dòng)學(xué)正解的坐標(biāo)信息由p(q):q∈Q→Rn反映出,Q反映的關(guān)節(jié)空間信息,Rn則反映出二或三維空間,q反映的關(guān)節(jié)變量。
避開障礙物的規(guī)劃研究的方法分為兩種:其一直接把障礙物轉(zhuǎn)化為約束條件;其二將工作空間內(nèi)存在的障礙物剔除獲得避障空間。
避障工作空間表示為:
WI={p(qc)∈WS∩OBS}?奐Rn (2)
式中,WI表示相交空間,OBS表示障礙物,n=2或3,Rn表示二或三維空間;qc是笛卡爾坐標(biāo)。
現(xiàn)有的計(jì)算工作空間的類型大體有數(shù)值法、幾何法和解析法[1],常采用的數(shù)值法通常是基于Monte Carlo的方法,主要原因是通用、簡(jiǎn)便,工程應(yīng)用最為廣泛[2]。
2 機(jī)械臂
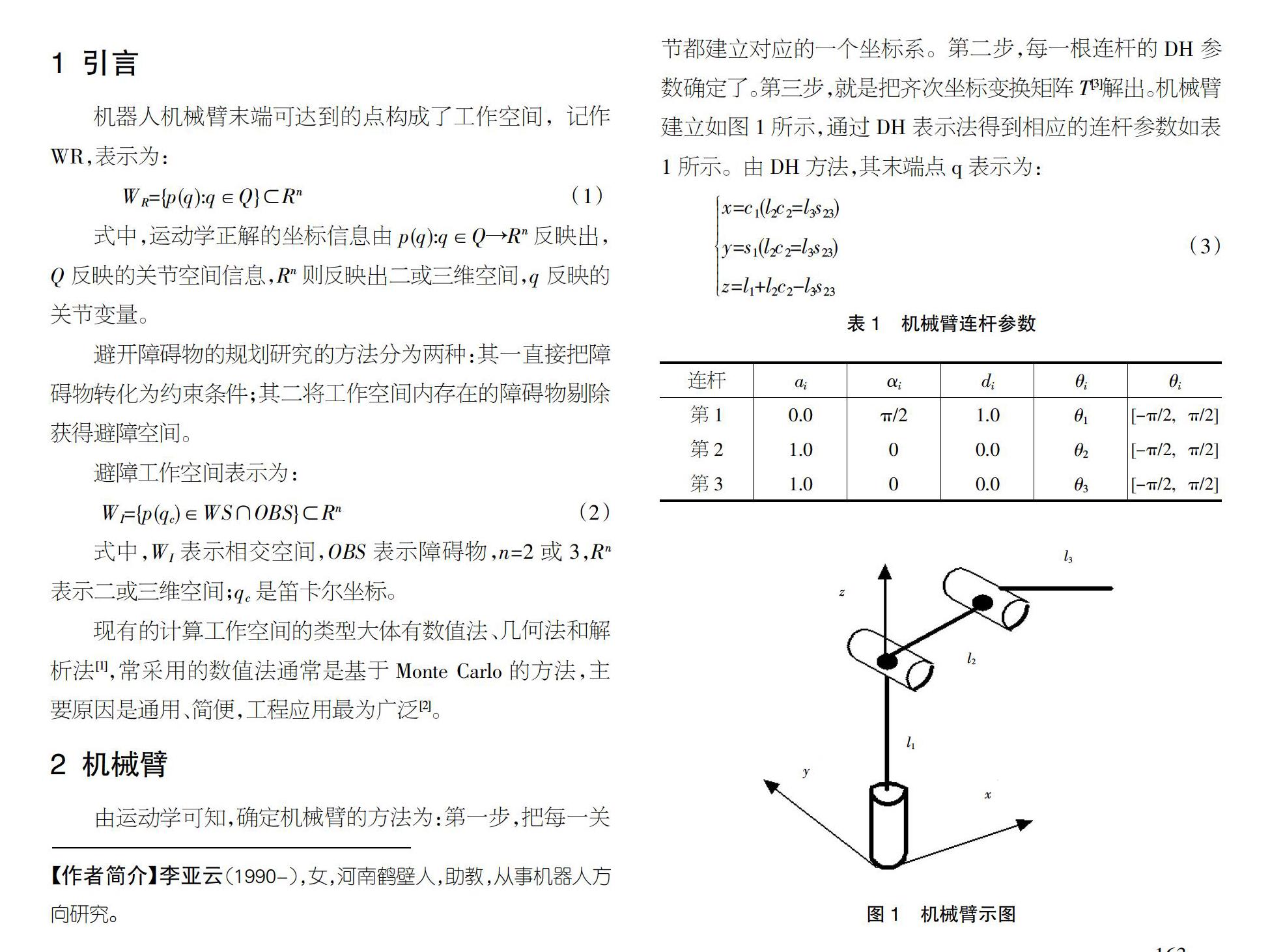
由運(yùn)動(dòng)學(xué)可知,確定機(jī)械臂的方法為:第一步,把每一關(guān)節(jié)都建立對(duì)應(yīng)的一個(gè)坐標(biāo)系。第二步,每一根連桿的DH參數(shù)確定了。第三步,就是把齊次坐標(biāo)變換矩陣T[3]解出。機(jī)械臂建立如圖1所示,通過(guò)DH表示法得到相應(yīng)的連桿參數(shù)如表1所示。由DH方法,其末端點(diǎn)q表示為:
x=c1(l2c2=l3s23)y=s1(l2c2=l3s23)z=l1+l2c2-l3s23 (3)
3 建立障礙物及工作空間的模型
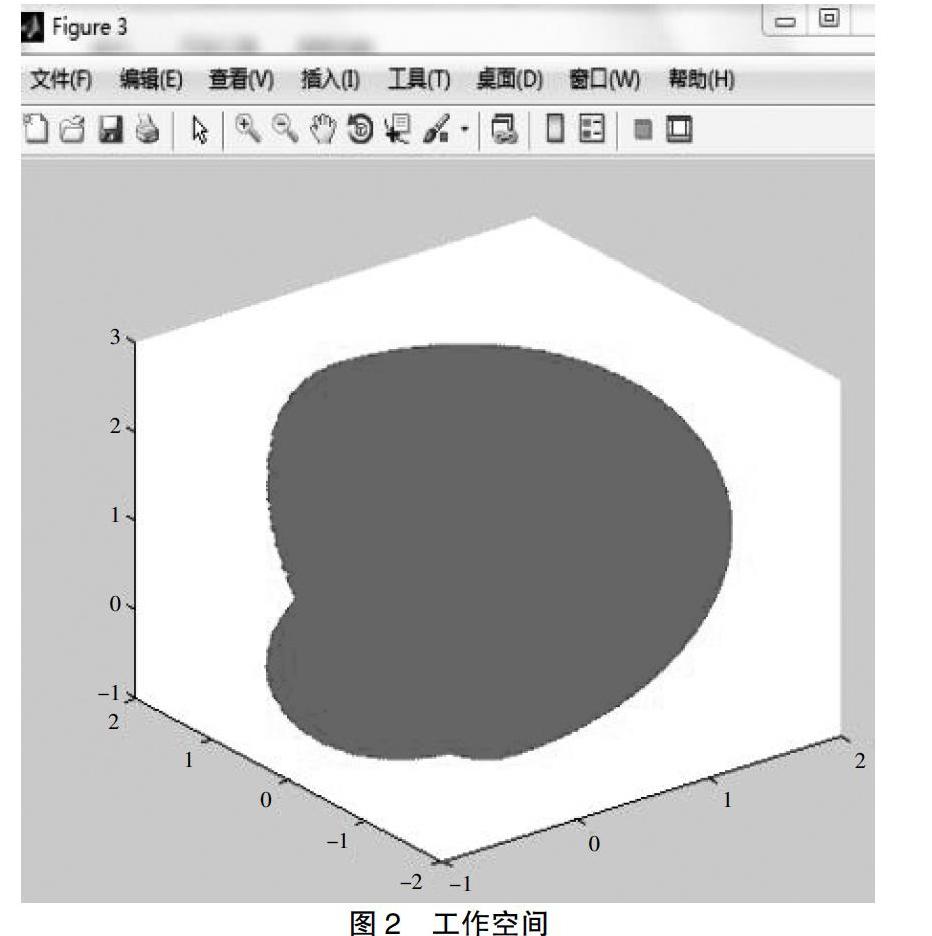
工作空間模型的生成主要采用Monte Carlo的方法,最終呈現(xiàn)出點(diǎn)云形式,生成模型的方法可以表述[4]為:
①根據(jù)求解機(jī)器人運(yùn)動(dòng)學(xué)正解的方法可知,需要利用變換矩陣把所需方程羅列出來(lái),從而獲得機(jī)械臂末端的具體方位,如(3)式所示。
②確定出關(guān)節(jié)變量可以旋轉(zhuǎn)的角度,再通過(guò)Beta分布的方法獲得匹配量的隨機(jī)值。
③把這些匹配好的隨機(jī)值運(yùn)算到(3)式中,工作空間就可以與關(guān)節(jié)變量匹配為一一對(duì)應(yīng)的情況,進(jìn)而得到工作空間的云圖,如圖2所示。
障礙物的圓柱形表面由如下的圓柱函數(shù)給出:
x=Rcos?鬃+O3xy=Rsin?鬃+O3yz=u(4)
式中,R是圓柱體的底圓半徑,假設(shè)為2,而(O3x,O3y)確定成圓心,0≤?鬃≤2π,z=u=7是高度。障礙物的模型就顯示出來(lái)如圖3所示。
4 邊界曲線的形成
第一步,按照坐標(biāo)軸的方向依次連續(xù)分割,從而得到對(duì)應(yīng)的一組邊界曲線。第二步,按照z軸的方向?qū)γ總€(gè)切片進(jìn)行邊界曲線的提取[5]。第三步,障礙物的點(diǎn)云對(duì)應(yīng)至工作空間的各個(gè)切片上,并羅列出整組的邊界曲線。
①主要通過(guò)Beta的方法來(lái)形成工作空間的點(diǎn)云。
②在點(diǎn)云中沿x軸找到最大和最小值,并計(jì)算絕對(duì)值。
③將區(qū)間分為最大和最小值之間的一組等距離的列。
④按照y軸方向找到每列的最大和最小值。
⑤不停重復(fù)第2到第4步,但需要交替y軸和x軸。
⑥將找到的邊界點(diǎn)依次連接得到閉合邊界曲線。
邊界多邊形可以表示為其不同頂點(diǎn)的(x,y,z)坐標(biāo)的序列,如下所示:
Wrpolygon?(5)
以上式中的Wr(1, 1)、Wr(1, 2)……Wr(l, w)表示邊界點(diǎn)。例如,Wr(1, 2)是片l中的第二點(diǎn)。
立體的障礙物也通過(guò)一個(gè)式子來(lái)獲得:
Obpolygon(6)
式中,μ,γ和ω是代表不同切片中的點(diǎn)的值,φ則表示切片的值。工作空間和障礙物的邊界曲線如圖4所示。
5 OAPW的邊界
應(yīng)用第3節(jié)中的做法到不同層的曲線上,即可得出OAPW的輪廓曲線如圖5所示。從兩個(gè)角度繪制三維的相交空間如圖6所示。
【參考文獻(xiàn)】
【1】黃博,趙建文,姚玉峰,等.面向可避障域的移動(dòng)操作機(jī)運(yùn)動(dòng)規(guī)劃解析方法[J].機(jī)械工程學(xué)報(bào),2010,46(15):8-16.
【2】曹毅,李秀娟,寧祎,等.三維機(jī)器人工作空間及幾何誤差分析[J].機(jī)械科學(xué)與技術(shù),2006,25(12):1458-1461.
【3】蔡自興.機(jī)器人學(xué)[M].北京:清華大學(xué)出版社,2009.
【4】陳國(guó)漢.蒙特卡洛模擬及其Stata應(yīng)用實(shí)現(xiàn)[M].北京:經(jīng)濟(jì)科學(xué)出版社,2015.
【5】Cao Y, Lu K, Li X, et al. Accurate Numerical Methods for Computing 2D and 3D Robot Workspace[J].International Journal of Advanced Robotic Systems,2011,8(6):1-13.
