水黽仿生特性與工程應(yīng)用研究進展
2020-07-14 05:12:24閆征王立新潘盼
河北科技大學學報 2020年3期
閆征 王立新 潘盼
摘 要:水黽是一種在湖泊、池塘、濕地中常見的小型昆蟲,憑借其腿部具有微納復(fù)合結(jié)構(gòu)而呈現(xiàn)的超疏水特性可穩(wěn)定站立在水面,受到普遍關(guān)注并逐步成為研究熱點。已有學者對水黽運動特性開展研究,以期獲取設(shè)計靈感用以研制功能優(yōu)異的超疏水表面與功能完善的仿生水黽機器人。從水黽運動特性入手,綜述了運動支撐力的測試方法,重點關(guān)注以水黽為仿生原型在工程仿生領(lǐng)域中超疏水表面制備、水上行走機器人和跳躍機器人研制的發(fā)展現(xiàn)狀。超疏水表面的制備應(yīng)從微形貌特征、制備工藝和生產(chǎn)成本等方面深入研究,仿生水黽機器人的研制需進一步考慮運動、驅(qū)動方式和支撐特性。基于水黽腿部微形貌結(jié)構(gòu)特征研制超疏水功效顯著且持久的超疏水表面,以及性能優(yōu)異、功能完備、運動特性高度相似的仿生水黽機器人將是未來發(fā)展的主要趨勢。
關(guān)鍵詞:仿生學;水黽;接觸力;運動特性;超疏水表面;仿生水黽機器人
中圖分類號:TB17 文獻標識碼:A
doi:10.7535/hbkd.2020yx03002
收稿日期:2020-05-16;修回日期:2020-05-31;責任編輯:馮 民
基金項目:國家自然科學基金(51205107);河北省自然科學基金(E2019208306);河北省高等學校青年拔尖人才資助項目(BJ2017011)
第一作者簡介:閆 征(1996—),男,河北石家莊人,碩士研究生,主要從事仿生原型測試技術(shù)方面的研究。
通訊作者:王立新副教授。E-mail: wanglx@hebust.edu.cn
Research progress of water strider in bionic
characteristic and engineering application
YAN Zheng, WANG Lixin, PAN Pan
(School of Mechanical Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China)
Abstract:
The water strider is a small insect in lakes, ponds, and wetlands, which can stand stably on water because of the excellent superhydrophobic property of legs that comes from the composite micro-nano structure. This feature has attracted numerous studies and become a research hopspot gradually. Scholars have conducted the investigation on the locomotion characteristic of water strider in order to acquire design inspirations to develop superhydrophobic surface and bionic water strider robots. Starting from the locomotion characteristic of water strider, this paper summarized the testing methods of water strider′s locomotion force, and focused on the development of superhydrophobic surface preparation and water walking or jumping robots in the engineering bionic field. The preparation of superhydrophobic surface should be lucubrated in the aspects of micro-morphological characteristic, preparation process and production cost, and the development of bionic strider robots needs to be considered in terms of the motion, driving mode and supporting characteristic. It will be the main trend in the future to develop superhydrophobic surface with remarkable and lasting efficacy and bionic water strider robots with excellent performance, complete function and highly similar motion characteristic, based on the micro-morphological structure characteristic of water strider leg.
Keywords:
bionics; water strider; contact force; locomotion characteristic; superhydrophobic surface; bionic water strider robot
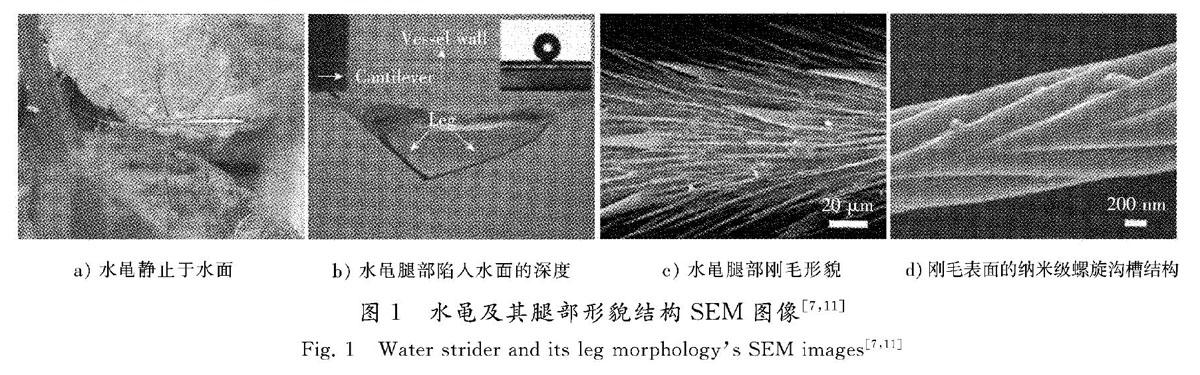
生物在經(jīng)歷數(shù)百萬年的自然進化后逐步獲得了適應(yīng)棲息環(huán)境的生存能力[1],這源于身體結(jié)構(gòu)與運動特性有了巨大的適應(yīng)性改變[2]。可以利用生物進化而來的結(jié)構(gòu)與功能來服務(wù)人類,即根據(jù)生物特有的功能特性與結(jié)構(gòu)特征來解決復(fù)雜工程問題[3-6]。水黽(見圖1 a))隸屬昆蟲綱黽蝽科,其腿部具有的超疏水特性能夠通過排斥水來獲取運動支撐力,可在水面靜止不動而不掉入水中,還可在水面快速奔跑而不被水浸濕。水黽因具有在水面快速移動、高速爬行的運動特征,吸引了眾多學者對其開展運動特征、超疏水特性等方面的研究。水黽腿部產(chǎn)生的水渦深度為(4.38±0.02)mm(見圖1 b)),分布著大量長度為50 μm、直徑小于3 μm的剛毛結(jié)構(gòu)(見圖1 c)),并且單根剛毛呈現(xiàn)螺旋形貌(見圖1 d)),微米級剛毛結(jié)構(gòu)能夠蓄留空氣,從而形成穩(wěn)固的液-氣-固接觸界面,以此呈現(xiàn)超疏水特性[7]。水黽運動特征包括噪聲小、超疏水性能優(yōu)異和對水面破壞力小等,可將其應(yīng)用于海洋勘探、輸油管道泄漏檢測和超疏水表面研制等方面[8-9],而且水黽腿部的超疏水特性在船艦疏水減阻方面也具有顯著的應(yīng)用價值[10]。本文綜述了水黽腿部的運動特性、運動支撐力測量方法,以及其作為仿生原型研制超疏水表面、仿生水黽機器人等方面的研究進展,并對其在仿生工程領(lǐng)域的發(fā)展前景與仍需要關(guān)注的方面進行分析。
1 水黽生物學特性與運動特性
1.1 水黽身體結(jié)構(gòu)功能特性
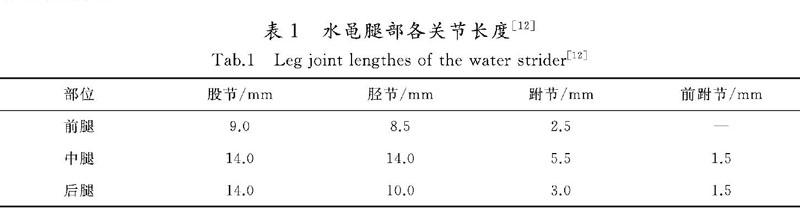
水黽的運動系統(tǒng)包括前腿、中腿和后腿,腿部關(guān)節(jié)包括前跗節(jié)、脛節(jié)、股節(jié)和基節(jié)[12]。水黽腿部具有較強的柔韌性,在支撐自身體重方面發(fā)揮重要作用[12-15]。水黽可自由調(diào)節(jié)關(guān)節(jié)配置,達到穩(wěn)定劃行、高效跳躍的需求[16]。采用三維激光掃描儀對水黽腹部的形貌結(jié)構(gòu)進行曲面重構(gòu),分析獲知其腹部漏斗式結(jié)構(gòu)可在順風時提高劃行速度,而在逆風時利于水黽穩(wěn)定劃行,還可促使其腿部迅速排水,避免被卷入水花中[17],這為研制具有優(yōu)良形態(tài)結(jié)構(gòu)的仿生水黽機器人提供了仿生靈感。水黽體長為2 cm,體重為0.01 g,腿部截面直徑為0.1 mm,腿部各關(guān)節(jié)長度如表1所示。按照水黽腿部各關(guān)節(jié)的結(jié)構(gòu)比例,確保研制出符合水黽生物特性的仿生水黽機器人。
1.2 水黽運動功能特性
水黽在水面具有快速移動和跳躍功能,最初認為水黽因具有腿部分泌的蠟狀物質(zhì)使其穩(wěn)定劃行[18-20]。GAO等[11]研究發(fā)現(xiàn)水黽單腿的排水體積是其腿部體積的300倍,單腿可產(chǎn)生1.52 mN的支撐力,約為自身質(zhì)量的15倍;水黽腿部剛毛表面分布大量的納米級螺旋溝槽結(jié)構(gòu),據(jù)此呈現(xiàn)優(yōu)異的超疏水特性,使自身能穩(wěn)定站立、劃行與跳躍。為研究水黽運動特性,利用高速攝像機采集未處理腿、去除前腿、去除中腿和去除后腿的運動數(shù)據(jù),據(jù)此分析水黽腿部的運動功能特性,即前腿與水面接觸來維持身體平衡,中腿進行劃動來提供穩(wěn)定動力,后腿和前腿配合保持平衡并與中腿配合以減少劃行阻力[21]。獲知水黽腿部的運動功能特性,可為以水黽為仿生原型研制仿生水黽機器人提供理論基礎(chǔ)。
水黽腿部與水面呈平行狀態(tài),可增加水面浮力以確保其穩(wěn)定站立[22]。水黽站立、劃行、跳躍時,其腿部與水面產(chǎn)生水渦,以獲取向前運動的推動力。更為強勁推動力的獲得,要以更大加速度向前推進,以此產(chǎn)生更多的水渦體積。水黽的快速運動源于其腿部與水面產(chǎn)生的水渦反作用力,這為研制水渦式仿生水黽機器人提供了設(shè)計靈感。研究發(fā)現(xiàn),水黽跳躍后會在下落前向內(nèi)彎曲腿尖以實現(xiàn)與水面的穩(wěn)定接觸,水黽與水面的接觸力剛好低于打破水面的臨界力[23],這種調(diào)整身體下落姿勢與水面安全接觸的技能源于自然進化產(chǎn)生的環(huán)境適應(yīng)能力。學者發(fā)現(xiàn),水黽在緊急狀況下會主動調(diào)整腿部的旋轉(zhuǎn)速度,使起跳速度和跳躍高度達到峰值,以躲避被捕食的危險[24]。水黽腿部的超疏水特性、微納復(fù)合結(jié)構(gòu)和特殊運動特征,為以水黽為仿生原型研制工程仿生應(yīng)用技術(shù)提供了重要思路。
2 水黽運動力測試
已有學者開展了水黽腿部產(chǎn)生的毫-微牛級支撐力測試研究,以表征使水黽穩(wěn)定站立于水面的運動支撐力。清華大學田煜團隊采用陰影提取法觀測水黽腿部與水面接觸產(chǎn)生的陰影面積來計算獲取運動支撐力,重建水黽腿部水渦模型以計算獲取相應(yīng)的支撐力,發(fā)現(xiàn)最大水渦深度較小時其與最大支撐力不成正比,水黽在抬腿時的水渦深度為0.02~0.09 mm,此時支撐力為0.3~1.0 N[25-26]。該結(jié)果可定量揭示水黽運動機理,為研制性能優(yōu)異的仿生水黽機器人提供理論指導。有的學者通過觀測水黽6條腿的運動陰影圖,發(fā)現(xiàn)水黽在約0.15 s內(nèi)完成推進過程且后腿控制其運動速度和運動方向[27],該結(jié)果深入闡述了水黽腿部的運動規(guī)律和運動特性。水黽依靠水面產(chǎn)生的支撐力使其呈現(xiàn)奇特的運動特性,采用陰影提取法測試該運動支撐力為研制仿生水黽機器人提供了理論基礎(chǔ)。
南京航空航天大學戴振東團隊已研制多量程三維力傳感器來測試動物的運動接觸反力,研究發(fā)現(xiàn)水黽在水面的劃行力為0.87~1.32 mN,且單位腿長的劃行力為0.3~0.4 mN/cm,劃行力與自身體重成正比;該團隊深入研究發(fā)現(xiàn),水黽依靠水面安全裕度來保證自身不會陷入水花[28]。有的學者采用動態(tài)力傳感器測定不同提升速度下水黽腿部離開水面的附著力,結(jié)果顯示,提升速度由0.02 m/s上升至0.40 m/s時會導致附著力下降。此結(jié)果表明水黽腿部的微納復(fù)合結(jié)構(gòu)是其呈現(xiàn)奇特運動特性的關(guān)鍵因素[29],這為仿生水黽機器人研制提供理論支撐。
水黽腿部由微米級剛毛與剛毛表面的納米級螺旋溝槽構(gòu)成的微納復(fù)合結(jié)構(gòu)對其奇特運動特性發(fā)揮關(guān)鍵作用。學者已開展水黽腿部脫離水面的力學研究[30],通過PVDF壓電材料傳感器來測量脫離力,為0.31 μN。亦有學者利用掃描電鏡觀測水黽腿部的微形貌結(jié)構(gòu)來建立脫水模型進而分析獲取脫離力,結(jié)果顯示水黽提升速度從0.01 m/s增加至0.30 m/s時,其腿部脫離力從0.10 μN急劇下降到0.03 μN,提升速度增加導致其腿部脫離力下降,因此水黽快速移動不會產(chǎn)生較大的逆水阻力[31]。
3 水黽腿部超疏水特性及仿生應(yīng)用研究
3.1 超疏水表面制備
超疏水表面是指與水滴接觸角大于150°且滾動角小于10°的表面[32]。自然界中很多動植物體表面都具有顯著的超疏水特性與自清潔功能,水黽腿部、蟬翼、蝴蝶翅膀、荷葉、豬籠草滑移區(qū)、水稻葉片等動植物體表的微納復(fù)合結(jié)構(gòu)均呈現(xiàn)顯著的超疏水特性[33-34]。超疏水表面應(yīng)用于仿生水黽機器人研制,與普通材料相比能夠減少30%的黏滯阻力,可顯著增加仿生水黽機器人的浮力并降低劃行阻力[35]。以動植物體表的超疏水特性為仿生原型研制超疏水表面,在自清潔、防腐蝕、流體減阻、微量液滴無損運輸、防霧抑冰等方面有著廣闊的應(yīng)用前景[36-40]。
YOUNG[41]提出了水滴在光滑固體表面的接觸角概念,即固-液-氣交點處與水滴作切線和固-液界線的夾角,用符號θ表示,把θ>150°的固體表面稱為超疏水表面。根據(jù)超疏水理論可知,固體表面的超疏水性能由表面粗糙結(jié)構(gòu)與表面自由能2個因素決定,以此實現(xiàn)超疏水表面制備[42]。超疏水表面制備的方法主要有靜電紡絲法、刻蝕法、溶膠-凝膠法、模板法、3D打印法等[43]。目前超疏水表面制備仍存在因微形貌結(jié)構(gòu)易遭到破壞而導致超疏水功能失效、制備工藝復(fù)雜和生產(chǎn)成本高等問題[44-45]。
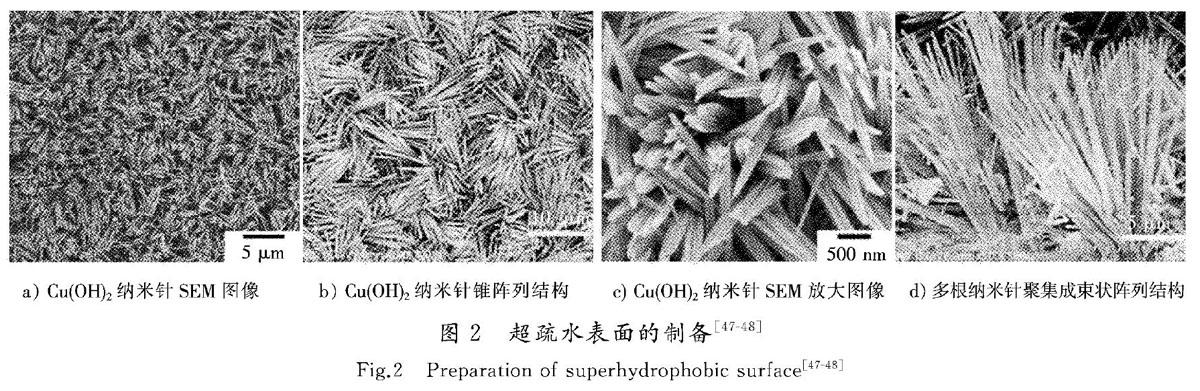
基于上述背景,水黽腿部表現(xiàn)出的超疏水特性引起廣泛關(guān)注,并逐步成為仿生原型,用以研制超疏水表面。已有學者在銅基金屬表面上修飾低表面能物質(zhì),制備出仿水黽腿部微納復(fù)合形貌結(jié)構(gòu)的超疏水表面,接觸角可達154°,計算得到仿生水黽模型4條腿的最大承載力為11.8 mN,可為水面微型設(shè)備的承載受力設(shè)計提供理論依據(jù)[46]。采用化學浸泡法在銅基金屬表面制備出具有溝槽形貌結(jié)構(gòu)的Cu(OH)2納米針陣列(見圖2 a)、圖2 c)),呈現(xiàn)出較高的接觸角并可使水滴輕易脫離,該超疏水表面具有優(yōu)異的抗壓穩(wěn)定性,以及顯著功效持久性與防水性能,有助于設(shè)計出堅固的防水材料和具有撞擊穩(wěn)定性的非黏超疏水表面,為以水黽為仿生原型研制超疏水表面提供了技術(shù)基礎(chǔ)[47]。通過恒電流電沉積法在銅基金屬表面構(gòu)建出Cu(OH)2納米針錐結(jié)構(gòu)(見圖2 b)、圖2 d)),其側(cè)面棱槽可有效保證超疏水表面的非黏附功效,水滴在掉落至表面時會產(chǎn)生彈跳,直至離開樣品表面,彈起瞬間水滴與表面不會產(chǎn)生明顯拖曳。該制備方法簡單易實現(xiàn),具有操作簡便、制備周期短、成本低廉和可用于大面積制備等優(yōu)點,為后續(xù)研制抗結(jié)冰、抗結(jié)霜非黏超疏水表面提供了基礎(chǔ)[48]。近年來,超疏水材料研究已取得較大的進展,但仍存在工藝繁瑣、生產(chǎn)效率差和改性材料力學性能低等問題,后續(xù)研究應(yīng)關(guān)注修飾材料表面,改變表面微納米結(jié)構(gòu)的分布,甚至對其微納米結(jié)構(gòu)重新組合以提升超疏水表面性能[49]。
3.2 仿生水黽機器人研制
仿生水黽機器人的2大功能特征為通用性和適應(yīng)性,通用性指其在可變環(huán)境中實現(xiàn)復(fù)雜功能來服務(wù)于人類,適應(yīng)性指其擁有程序判斷、識別具體環(huán)境的能力[50]。仿生水黽機器人腿部第2關(guān)節(jié)長度與總長度的比例合理性可提高仿生水黽機器人的運動穩(wěn)定性,并能獲得更大推進力。仿生水黽機器人可用于海上救援、水面環(huán)境監(jiān)測等方面[51]。
BUSH團隊研制出世界首款仿生水黽機器人,采用塑料材質(zhì)的彈性元件提供動力,腿部材料為經(jīng)過超疏水處理后的不銹鋼絲(見圖3 a)),質(zhì)量僅為0.35 g,其在水面的運動速度可達18 cm/s,為后續(xù)仿生水黽機器人研制奠定了基礎(chǔ),但存在負載能力差、驅(qū)動性能低和無法實現(xiàn)遠距離操控等不足[52]。清華大學吳立成團隊研制出“Water Dancer”仿生水黽機器人(見圖3 b)),該機器人重約2 g且腿部材料為直徑0.2 mm的超疏水不銹鋼絲, 8條支撐腿和2條驅(qū)動腿位于同水平面上,采用直流電機驅(qū)動三級齒輪機構(gòu)提供動力[53]。該團隊隨
后研制出“Water DancerⅡ”仿生水黽機器人(見圖3 c)),采用雙電機驅(qū)動其10條支撐腿和2條驅(qū)動腿,總重約6 g,在水面的運動速度可達20 cm/s,十字架驅(qū)動腿結(jié)構(gòu)可使腿部旋轉(zhuǎn)以產(chǎn)生更大推進力[54]。近期,新型仿生水黽機器人已被研制(見圖3 d)),質(zhì)量為21.75 g,在水面的運動速度可達7.15 cm/s,由4條支撐腿和2條驅(qū)動腿組成,且每條支撐腿與3個同心圓環(huán)相連接,可使其在水面站立更加穩(wěn)定[55]。未來仿生水黽機器人研究的方向應(yīng)重點關(guān)注驅(qū)動方式、運動穩(wěn)定性等方面。
為提高劃水效率,有學者設(shè)計出凸輪連桿機構(gòu)型仿生水黽機器人(見圖4 a)),質(zhì)量為3.9 g,在水面的運動速度可達16 cm/s,通過模擬水黽腿部運動模式而顯著提高劃水效率,此外還具有運轉(zhuǎn)靈活的運動特性[11]。河北工業(yè)大學高鐵紅團隊研制出以泡沫作為腿部材料并以電磁進行驅(qū)動的仿生水黽機器人(見圖4 b)),分布有4條支撐腿和2條驅(qū)動腿,總重為95.1 g,在水面的運動速度可達15 cm/s,具有結(jié)構(gòu)簡單、控制靈活、負載能力強等優(yōu)點[56]。
仿生水黽機器人處于水面環(huán)境,要求其具備高穩(wěn)定性、適應(yīng)風浪、實時調(diào)整運動模式的能力。根據(jù)上述需求,有學者研制出依靠表面張力進行漂浮的仿生水黽機器人,腿部材料為經(jīng)過超疏水處理的螺旋狀空心銅絲,采用電機驅(qū)動劃行(見圖5 a)),測試發(fā)現(xiàn)該水黽機器人可維持自身平衡以保證穩(wěn)定運動[57]。亦有學者研制出可在不穩(wěn)定水面環(huán)境中通過調(diào)整自身狀態(tài)而趨于運動平穩(wěn)的仿生水黽機器人(見圖5 b)),質(zhì)量為439 g,腿部材料為中空橢球,水面平靜時位于中空橢球上部的V型彈簧鋼緊繃,使橢球形長軸與水平方向平行以降低劃水阻力,波浪環(huán)境下V型彈簧鋼產(chǎn)生松弛現(xiàn)象以提升自身平衡特性[50]。仿生水黽機器人還應(yīng)從腿部材料特性方面進行研究,以往采用剛性腿而沒有考慮使用柔性腿,水黽腿部特有的柔性特征是其運動自如的重要因素,也是其呈現(xiàn)高劃水效率的關(guān)鍵。
合適的腿部材料是仿生水黽機器人高效運動的關(guān)鍵。研究人員將柔性腿代替剛性腿研制出質(zhì)量僅為0.165 g、在水面的運動速度高達15 cm/s的仿生水黽機器人,采用壓電彎曲致動器驅(qū)動,由四桿傳動機構(gòu)、揮動翼和彈力腿組成(見圖6 a)),驅(qū)動腿材料具有顯著的柔性特征[58]。隨后研制出垂直跳躍型仿生水黽機器人(見圖6 b)),依靠記憶合金彈簧驅(qū)動實現(xiàn)垂直跳躍,質(zhì)量輕至0.068 g,其垂直跳躍距離可達14.2 cm,能夠?qū)崿F(xiàn)遠大于其自身尺寸的垂直跳躍[59],這為研制性能優(yōu)異的跳躍式仿生水黽機器人開創(chuàng)了先例。水黽腿部的柔性特征可提高其劃水效率和負載能力,而仿生水黽機器人柔性腿結(jié)構(gòu)設(shè)計、腿部變形問題和疏水材料選擇等方面還需深入研究,以優(yōu)化其運動特性、驅(qū)動方式和支撐結(jié)構(gòu),實現(xiàn)研制性能優(yōu)異、負載能力強、劃水效率高和運動穩(wěn)定性高的仿生水黽機器人的目標。
4 結(jié) 語
源于自然進化,水上昆蟲水黽因腿部微納復(fù)合結(jié)構(gòu)而呈現(xiàn)出優(yōu)異的超疏水特性,具有能夠在水面穩(wěn)定站立、劃行、跳躍等運動特性。科研人員利用三維力傳感器、壓電材料傳感器與陰影提取法測試水黽在水面產(chǎn)生的接觸力、脫離力和支撐力,依據(jù)水黽腿部超疏水特性和運動特征,開展了超疏水表面和仿生水黽機器人的研制,通過化學沉積法和電沉積法制備出了仿水黽腿部微納形貌結(jié)構(gòu)的超疏水表面。研制出了運動性能優(yōu)異的仿生水黽機器人,并對其支撐特性、驅(qū)動特性、穩(wěn)定特性和柔性腿驅(qū)動特性等方面進行了深入研究。仿生水黽機器人可用于海面救援、水面環(huán)境監(jiān)測、管道液體泄漏檢測等工程領(lǐng)域。本研究可加深學者對水黽在工程仿生方面應(yīng)用的認知,有助于推動以水黽為仿生原型研制超疏水表面與仿生水黽機器人這一應(yīng)用技術(shù)的發(fā)展。
參考文獻/References:
[1] DICKINSON M. Bionics: Biological insight into mechanical design[J]. Proc Natl Acad Sci Usa,1999,96(25): 14208-14209.
[2] 任露泉,梁云虹. 耦合仿生學[M]. 北京:科學出版社,2012.
[3] 杜家緯. 生命科學與仿生學[J]. 生命科學,2004,16(5): 317-323.
DU Jiawei. Life science and bionics[J]. Chinese Bulletin of Life Sciences,2004,16(5): 317-323.
[4] 路甬祥. 仿生學的科學意義與前沿: 仿生學的意義與發(fā)展[J]. 科學中國人,2004,12(4): 22-24.
LU Yongxiang. The scientific significance and frontier of bionics: Significance and development of bionics[J]. Scientific Chinese, 2004,12(4): 22-24.
[5] 畢語涵,孫剛,房巖. 生物表面的疏水自潔研究[J]. 中獸醫(yī)學雜志,2015,59(9): 76-77.
BI Yuhan,SUN Gang,F(xiàn)ANG Yan. The research on hydrophobic self-cleaning of biological surface[J]. Chinese Journal of Traditional Veterinary Science,2015,59(9): 76-77.
[6] BUSH J,HU D. Walking on water: Biolocomotion at the interface[J]. Physics Today,2005,38(1): 339-369.
[7] FENG Xiqiao,GAO Xuefeng,WU Ziniu,et al. Superior water repellency of water strider legs with hierarchical structures: ??? Experiments and analysis[J]. Langmuir: The ACS Journal of Surfaces and Colloids,2007,23(9): 4892-4896.
[8] SONG Y,SITTI M. Surface-tension-driven biologically inspired water strider robots: Theory and experiments[J]. IEEE ??? Transactions on Robotics,2007,23(3): 578-589.
[9] 張明文. 仿生水黽機器人的研究[D]. 哈爾濱:哈爾濱工業(yè)大學,2010.
ZHANG Mingwen. Research of Bionic Water Strider Robot[D]. Harbin:Harbin Institute of Technology,2010.
[10]邊婷婷,周海峰,劉春陽,等. 仿生水黽在救生船舶中的應(yīng)用研究初探[J]. 應(yīng)用能源技術(shù),2015(10): 5-9.
BIAN Tingting,ZHOU Haifeng,LIU Chunyang,et al. Prospect of the bionic water strider in rescue ship[J]. Applied Energy Technology,2015(10): 5-9.
[11]GAO Xuefeng,JIANG Lei. Biophysics: Water-repellent legs of water striders[J]. Nature,2004,432(7013): 36.
[12]張新彬. 基于表面張力的仿水黽機器人研究[D]. 哈爾濱:哈爾濱工業(yè)大學,2016.
ZHANG Xinbin. Surface Tension-driven Biologically Inspired Water Strider Robot[D]. Harbin:Harbin Institute of Technology, 2016.
[13]VELLA D. Floating objects with finite resistance to bending[J]. Langmuir,2008,24(16): 8701-8706.
[14]ZHENG Quanshui,YANG Yu,F(xiàn)ENG Xiqiao. The role of adaptive-deformation of water strider leg in its walking on water[J].Journal of Adhesion Science and Technology,2009,23(3): 493-501.
[15]KONG Xiangqing,LIU Jianlin,ZHANG Weijie,et al. Load-bearing ability of the mosquito tarsus on water surfaces arising? from its flexibility[J]. AIP Advances,2015,5(3): 037101.
[16]JI Xiangying,WANG Jiawen,F(xiàn)ENG Xiqiao. Role of flexibility in the water repellency of water strider legs: Theory and experiment[J]. Physical Review E,2012,85(2): 021607.
[17]叢茜,王驥月,李明,等. 基于逆向工程的水黽腹部建模及特征分析[J]. 應(yīng)用力學學報,2017,34(2): 264-268.
CONG Qian,WANG Jiyue,LI Ming,et al. Modeling and characteristic analysis of water strider abdomen based on reverse engineering[J]. Chinese Journal of Applied Mechanics,2017,34(2): 264-268.
[18]EDWARD B. Surface tension supported floating of heavy objects: Why elongated bodies float better?[J]. Journal of Colloid and Interface Science,2016,463(20): 8-12.
[19]CAPONIGRO M,ERIKSEN C. Surface film locomotion by the water strider, gerris remigis say[J]. American Midland Naturalist,1976,95(2): 268-278.
[20]DICKINSON M. Animal locomotion: How to walk on water[J]. Nature,2003,424(6949): 621-622.
[21]田為軍,王驥月,李明,等. 面向水上機器人的水黽運動觀測[J]. 吉林大學學報(工學版),2018,48(3): 812-820.
TIAN Weijun,WANG Jiyue,LI Ming,et al. Observation of locomotion of water strider towards water strider robot[J]. Journal of Jilin University(Engineering and Technology Edition),2018,48(3): 812-820.
[22]LIU Jianlin,SUN Jing,MEI Yue. Biomimetic mechanics behaviors of the strider leg vertically pressing water[J]. Applied Physics ??? Letters,2014,104(23): 231607.
[23]KOH J,YANG E,JUNG G,et al. Jumping on water: Surface tension-dominated jumping of water striders and robotic ??? insects[J]. Science,2015,349(6247): 517-521.
[24]YANG E,SON J,LEE S,et al. Water striders adjust leg movement speed to optimize take off velocity for their morphology[J]. Nature Communications,2016,7(12): 13698.
[25]ZHENG Yelong,LU Hongyu,YIN Wei,et al. Elegant shadow making tiny force visible for water-walking arthropods and ??? updated archimedes principle[J]. Langmuir,2016,32(41): 10522-10528.
[26]YIN Wei,ZHENG Yelong,LU Hongyu,et al. Three-dimensional topographies of water surface dimples formed by superhydrophobic water strider legs[J]. Applied Physics Letters,2016,109(16).doi:10.1063/1.4964788.
[27]LU Hongyu,ZHENG Yelong,YIN Wei,et al. Propulsion principles of water striders in sculling forward through shadow method[J]. Journal of Bionic Engineering,2018,15(3): 516-525.
[28]吉愛紅. 動物運動接觸反力測試系統(tǒng)、實驗與分析[D]. 南京:南京航空航天大學,2007.
JI Aihong. Animals Surface Reaction Forces: Measuring System,Experiments and Analysis[D]. Nanjing: Nanjing University of ? Aeronautics and Astronautics,2007.
[29]SUN Peiyuan,ZHAO Meirong,JIANG Jile,et al. The study of dynamic force acted on water strider leg departing from water surface[J]. AIP Advances,2018,8(1): 015228.
[30]韓亞倩. 基于靜電力的微力傳感器標定系統(tǒng)設(shè)計與應(yīng)用研究[D]. 天津:天津大學,2017.
HAN Yaqian. Design and Application of the Microforce Sensor Calibration System Based on Electrostatic Force[D]. Tianjin: Tianjin ??? University,2017.
[31]ZHANG Lele,ZHAO Meirong,WANG Zhiyi,et al. Measurement of dynamic force acted on water strider leg jumping upward by ? the PVDF film sensor[J]. Journal of Visualized Experiments,2018,138(3): 58221.
[32]MIWA M,NAKAJIMA A,F(xiàn)UJISHIMA A,et al. Effects of the surface roughness on sliding angles of water droplets on superhydrophobic surfaces[J]. Langmuir,2000,16(13): 5754-5760.
[33]高雪峰,江雷. 天然超疏水生物表面研究的新進展[J]. 物理,2006,35(7): 26-31.
GAO Xuefeng,JIANG Lei. New progress in surface research of natural superhydrophobic organisms[J]. Physics,2006,35(7): 26-31.
[34]LIU Chunbao,ZHU Ling,BU Weiyang,et al. Superhydrophobic surfaces: From nature to biomimetic through VOF simulation[J].Micron,2018,107(1): 94-100.
[35]趙泰磊,宋付權(quán). 仿生水黽機器人的漂浮特征[J]. 水動力學研究與進展,2012,27(2): 162-167.
ZHAO Tailei,SONG Fuquan. Floating characteristics of bio-mimetic water strider robot[J]. Chinese Journal of Hydrodynamics,? 2012,27(2): 162-167.
[36]NAKAJIMA A,HASHIMOTO K,WATANABE T,et al. Transparent superhydrophobic thin films with self-cleaning properties[J]. ?? Langmuir,2000,16(17): 7044-7047.
[37]BHUSHAN B,JUNG Y,KOCH K. Self-cleaning efficiency of artificial superhydrophobic surfaces[J]. Langmuir,2009,25(5): 3240-3248.
[38]陳鈺,徐建生,郭志光. 仿生超疏水性表面的最新應(yīng)用研究[J]. 化學進展,2012,24(5): 696-708.
CHEN Yu,XU Jiansheng,GUO Zhiguang. Recent advances in application of biomimetic superhydrophobic surfaces[J]. Progress in Chemistry,2012,24(5): 696-708.
[39]GOU Xuelian,GUO Zhiguang. Superhydrophobic plant leaves with micro-line structures: An optimal biomimetic objective in ?? bionic engineering[J]. Journal of Bionic Engineering,2018,15(5): 851-858.
[40]王鵬偉,劉明杰,江雷. 仿生多尺度超浸潤界面材料[J]. 物理學報,2016,65(18): 61-83.
WANG Pengwei,LIU Mingjie,JIANG Lei. Bionic multi-scale super-wet interface material[J]. Acta Physica Sinica,2016,65(18): ? 61-83.
[41]YOUNG T. An essay on the cohesion of fluids[J]. Philosophical Transactions of Royal Society,1805,95(1): 65-87.
[42]BARTHLOTT W,NEINHUIS C. Purity of the sacred lotus,or escape from contamination in biological surfaces[J]. Planta,1997,?? 202(1): 1-8.
[43]王立新,張碩研,紀運廣,等. 超疏水表面仿生原型制備技術(shù)研究分析[J]. 河北科技大學學報,2020,41(1): 1-13.
WANG Lixin, ZHANG Shuoyan, JI Yunguang, et al. Research analysis of superhydrophobic bionic prototype preparation technology[J]. Journal of Hebei University of Science and Technology,2020,41(1): 1-13.
[44]屈孟男,侯琳剛,何金梅,等. 功能化超疏水材料的研究與發(fā)展[J]. 化學進展,2016,28(12): 1774-1787.
QU Mengnan,HOU Lingang,HE Jinmei,et al. Research and development of functional superhydrophobic materials[J]. Progress ??? in Chemistry,2016,28(12): 1774-1787.
[45]呂婷,王媛怡,陳慶民. 全氟癸基硅烷(PTES)修飾微納結(jié)構(gòu)超疏水表面耐久性研究[J]. 南京大學學報(自然科學),2017, 53(1): 184-190.
LV Ting,WANG Yuanyi,CHEN Qingmin. Durability research of superhydrophobic surfaces prepared on micro/nano structure ? substrate modified by PTES[J]. Journal of Nanjing University (Natural Sciences),2017,53(1): 184-190.
[46]王慶成,楊曉東,曹國華,等. 仿水黽模型承載力試驗研究[J]. 制造業(yè)自動化,2012,34(24): 134-136.
WANG Qingcheng,YANG Xiaodong,CAO Guohua,et al. Experimental study of supporting force of the bionic water strider ??? model[J]. Manufacturing Automation,2012,34(24): 134-136.
[47]YAO Xi,CHEN Qinwen,XU Liang,et al. Bioinspired ribbed nanoneedles with robust superhydrophobicity[J]. Advanced ??? Functional Materials,2010,20(4): 656-662.
[48]孫寶. 銅基超疏水界面構(gòu)筑及抗結(jié)冰、抗結(jié)霜性能研究[D]. 南京:南京理工大學,2014.
SUN Bao. Fabrication of Superhydrophobic Surface on Cooper and Its Application in Anti-icing and Anti-frosting[D]. Nanjing: Nanjing University of Science & Technology,2014.
[49]仵玉芝,杜趙群. 仿生超疏水材料的研究進展[J]. 國際紡織導報,2018,46(6): 38-44.
WU Yuzhi,DU Zhaoqun. Research progress of the biomimetic superhydrophobic materials[J]. Melliand China,2018,46(6): ?? 38-44.
[50]張世豪. 仿生水黽機器人建模及性能研究[D]. 杭州:浙江大學,2017.
ZHANG Shihao. Research on the Modeling and Property of Water Strider-Like Robot[D]. Hangzhou: Zhejiang University,2017.
[51]鄭俊,張嘉鐘,于開平,等. 仿水黽高速水上運動機器人劃水產(chǎn)生的半球渦特征及其推進特性分析[J]. 船舶力學,2018,? 22(5): 517-527.
ZHENG Jun,ZHANG Jiazhong,YU Kaiping,et al. Propulsion features of the hemispherical vortices produced by the high speed ? bionic robot mimicking the water strider locomotion on water surface[J]. Journal of Ship Mechanics,2018,? 22(5): 517-527.
[52]HU D,CHAN B,BUSH J. The hydrodynamics of water strider locomotion[J]. Nature,2003,424(6949): 663-666.
[53]吳立成,丁樑,郭棟. 水上漂浮仿生水黽機器人[P]. 中國專利: 200610112601.7,2006-08-25.
[54]WU Licheng,LIAN Zhipeng,YANG Guosheng,et al. Water dancer Ⅱ-a: A non-tethered telecontrollable water strider robot[J]. ??? International Journal of Advanced Robotic Systems,2011,8(4).doi:105772/45704.
[55]OZCAN O,WANG H,TAYLOR J,et al. Strider Ⅱ: A water strider-inspired miniature robot with circular footpads[J]. International Journal of Advanced Robotic Systems,2014,11(6).doi:10.5772/58701.
[56]GAO Tiehong,CAO Junyi,GAO Feng,et al. The research of a bionic robot that can walk on water surface based on water strider[C]// Technology & Innovation Conference.[S.l.]:[s.n.],2006: 2180-2185.
[57]ZHANG Xinbin,ZHAO Jie,ZHU Qing,et al. Bioinspired aquatic microrobot capable of walking on water surface like a water strider[J]. ACS Applied Materials & Interfaces,2011,3(7): 2630-2636.
[58]ZHOU Sui,ZHANG Weiping,ZOU Yang,et al. Piezoelectric driven insect-inspired robot with flapping wings capable of? ??? skating on the water[J]. Electronics Letters,2017,53(9): 579-580.
[59]KOH J,YANG E,JUNG G,et al. Jumping on water: Surface tension-dominated jumping of water striders and robotic insects[J]. ? Science,2015,349(6247): 517-521.
閆征,王立新,潘盼.
水黽仿生特性與工程應(yīng)用研究進展
[J].河北科技大學學報,2020,41(3):210-217.
YAN Zheng,WANG Lixin,PAN Pan.
Research progress of water strider in bionic characteristic and engineering application
[J].Journal of Hebei University of Science and Technology,2020,41(3):210-217.
