智能噴漆機器人系統
2020-07-14 07:19:40王碩陳克文
科學導報·學術 2020年73期
王碩 陳克文
目前車身噴漆的方式主要有兩種:1、傳統的手動噴漆;2、機器人自動噴漆。傳統的手動噴漆主要用于汽車的維修行業,其缺點:1、成本高;2效率低;3對操作者的健康有一定的危害。在整車生產環節多用機器人自動噴漆方式,機器人自動噴漆方式在汽車生產線上最為成熟,但是不適合于汽車的維修行業。
本文將介紹一種結構相對簡單、適合于汽車維修行業、成本低、操控性好、安全可靠、噴漆效率高的智能噴漆機器人系統,以滿足汽車維修行業噴漆需要。
本智能噴漆機器人系統,能夠滿足汽車維修噴漆要求,并達到手動噴漆效果,保證了噴漆質量,提高了工作效率,如用于4s店,可明顯提升4s店整體服務水平,降低了操作人員的勞動強度,使操作人員遠離漆霧區域,保證了操作人員的身心健康,安全可靠,省時省力,節能,降低產生成本。
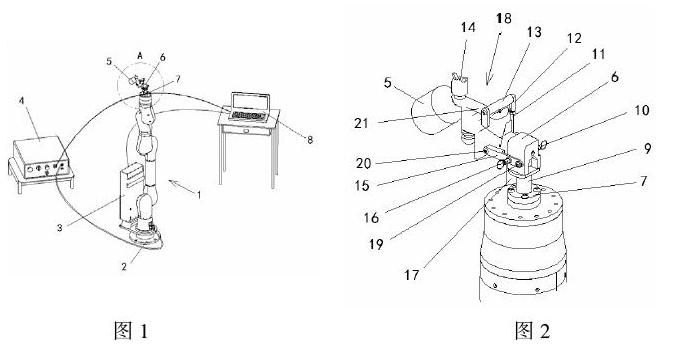
智能噴漆機器人系統,主要結構包括:機器人(1),在機器人(1)的下端設有底座(2),機器人(1)與控制器(4)相接,控制器(4)與處理器(8)相接,處理器(8)與深度相機(3)相接,在機器人(1)的上端通過法蘭盤(7)與連接軸(9)的一端相接,連接軸(9)的另一端接有安裝座(6),噴漆槍(18)的安裝軸插入所述的安裝座(6)內部上下方向設置的長孔內,在安裝座(6)的一側設有對噴漆槍(18)的安裝軸進行定位的定位螺釘(10),在安裝座(6)的另一側通過銷軸(19)與限位臂(15)的一端轉動連接,限位臂(15)的另一端連接有限位軸(20),限位軸(20)支撐在噴漆槍(18)的安裝軸處,在限位臂(15)的中部與安裝座(6)之間設有分度銷(16),與氣動裝置相接的氣缸(17)固定安裝在安裝座(6)上,與氣缸(17)相配的活塞桿(11)的外端頭通過連接件(12)與撥動桿(13)相接,撥動桿(13)與噴漆槍(18)上的板機(21)相配。
處理器(8)首先通過深度相機(3)獲取汽車噴漆維修區域的三維點云模型,對三維點云數據進行去噪、平滑等預處理,然后通過一整套算法提取三維點云數據特征點,進而計算噴漆機器人的噴漆運動軌跡。同時,需標定深度相機(3)坐標系與噴漆機器人坐標系的相對位置關系,最后控制噴漆機器人沿著自動規劃的運動軌跡進行運動并完成噴漆。
附圖說明
圖1是本實用新型具體實施方式的結構示意圖;
圖2是圖1所示的A部放大示意圖;
具體實施方式
如圖1、2所示:智能噴漆機器人系統,在機器人(1)的下端設有底座2,安裝時通過底座(2)和地腳螺栓將機器人(1)固定安裝于基礎上。
機器人(1)與控制器(4)相接,控制器(4)與處理器(8)相接,處理器(8)與深度相機(3)相接。
在機器人(1)的上端通過法蘭盤(7)與連接軸(9)的一端相接,連接軸(9)的另一端固定連接有安裝座(6)。
接有儲漆筒(5)的噴漆槍(18)的安裝軸插入安裝座(6)內部上下方向設置的長孔內,在安裝座(6)的一側設有對噴漆槍(18)的安裝軸進行定位的定位螺釘(10),定位螺釘(10)與安裝座(6)螺紋連接,定位螺釘(10)的內端頭頂入噴漆槍18的安裝軸上的凹坑內,使噴漆槍(18)的安裝軸可相對于安裝座(6)轉動。在安裝座(6)的另一側通過銷軸(19)與限位臂(15)的一端轉動連接,限位臂(15)的另一端連接有限位軸(20),限位軸20支撐在噴漆槍(18)的安裝軸處,用于對噴漆槍(18)的安裝軸進行支撐,即支撐了整個噴漆槍(18)。在限位臂(15)的中部與安裝座(6)之間設有分度銷(16),分度銷(16)內端頭頂靠在安裝座(6)側面上的凹槽內,使限位臂(15)相對于安裝座(6)相對固定,分度銷(16)上可套裝有復位彈簧,向外側拉動分度銷(16)時,克服復位彈簧的彈力,使分度銷(16)的內端頭離開安裝座(6)側面上的凹槽,松開時,在復位彈簧作用下分度銷(16)內端頭自動頂靠在安裝座(6)側面上的凹槽內,限位臂(15)通過限位軸(20)可對噴漆槍(18)進行支撐,拉開分度銷(16)時,可解除對噴漆槍(18)的定位,噴漆槍(18)可相對于安裝座(6)松動,方便拆卸換漆及清洗。
與氣動裝置相接的氣缸(17)固定安裝在安裝座(6)上,與氣缸(17)相配的活塞桿(11)的外端頭通過連接件(12)與撥動桿(13)相接,撥動桿(13)與噴漆槍(18)上的板機(21)相配,氣缸(17)帶動活塞桿(13)回縮時,可通過撥動桿(13)下壓板機(21),使噴漆槍(18)從噴漆口(14)噴漆。其中噴漆槍(18)為常用的手動噴漆槍。機器人(1)為協作機器人。
工作過程:此套系統將深度相機安裝在噴漆機器人底盤處。處理器(8)首先通過深度相機(3)獲取汽車噴漆維修區域的三維點云模型,對三維點云數據進行去噪、平滑等預處理,然后通過一整套算法提取三維點云數據特征點,進而計算噴漆機器人的噴漆運動軌跡并標定深度相機坐標系與噴漆機器人1坐標系的相對位置關系(即統一坐標系),最后控制噴漆機器人沿著自動規劃的運動軌跡進行勻速運動并通過控制器(4)控制氣動裝置,帶動氣缸(17)、板機(21)動作,完成噴漆。具有安全可靠,省時省力,節能環保,降低產生成本的優點。
本系統適合應用在汽車維修領域的噴漆、補漆,操作簡單,能夠改善噴漆工人在有毒有害氣體環境下工作的條件,減少噴漆工作的職業危害,實現用智能科技引領綠色環保汽車售后維修市場的目標,隨著科技的發展機器人終將代替人去完成危險或對人體有危害的作業,本文也希望能對工業的進步提出些問題,提供一些幫助。
(作者單位:1.斯凱孚(大連)軸承與精密技術產品有限公司;2.愛康普科技(大連)有限公司)
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
汽車與安全(2019年9期)2019-11-22 09:48:03
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
新聞傳播(2015年10期)2015-07-18 11:05:40
決策探索(2014年21期)2014-11-25 12:29:50