應用簡單時間網絡的遙感衛星工作模式設計方法
2020-07-15 09:33:12任放杜朝陳曦潘莉
航天器工程 2020年3期
任放 杜朝 陳曦 潘莉
(北京空間飛行器總體設計部,北京 100094)
遙感衛星工作模式設計是遙感衛星總體設計的核心內容。一般來說,遙感衛星有效載荷任務的完成包括成像和數據傳輸兩項。在進行成像和數據傳輸過程中,遙感衛星典型工作狀態為:①成像記錄模式。衛星飛經感興趣目標區域范圍內,在處于正常飛行姿態或側視飛行姿態并穩定一段時間后,有效載荷開機并對地成像,星上數據處理及傳輸系統對有效載荷觀測數據進行實時處理、格式編排后,將處理結果送到星載數據存儲器存儲,等待衛星飛經地球站可視范圍內時擇機傳輸。②成像實傳模式。衛星飛經地球站可視范圍內(5°仰角以上為可見),在處于正常飛行姿態或側視飛行(衛星繞機動軸擺動一定角度)姿態并穩定一段時間后,有效載荷開機并對地成像,星上數據處理及傳輸系統對有效載荷觀測數據進行實時處理、格式編排、信道編碼、調制、放大、濾波后,將處理結果經數傳天線發送至地球站。③數據回放模式。衛星飛經地球站可視范圍內,處于正常飛行姿態時,星載數據存儲器進行數據回放,數據經信道編碼等處理后送至數傳射頻通道進行調制、放大、濾波,最后由數傳天線發送至地球站[1]。
傳統的遙感衛星工作模式設計大多采用人工手動設計方式,主要是通過對衛星用戶的需求進行分析,并結合衛星設計狀態,明確衛星在軌運行階段主要工作狀態及設備間協調工作的方式。在衛星系統較簡單、有效載荷使用較單一的情況下,工作模式設計結果一般在幾十種。隨著任務復雜度、有效載荷應用的靈活程度提升,在軌所需的工作模式數量增長趨勢明顯,已經達到了上百種。因此,人工手動設計方法無法高效、準確完成衛星工作模式設計工作。簡單時間網絡(STN)是一種應用廣泛的時間表示模型,具有表達能力強、計算方便等優點,便于時間管理,已被廣泛應用于規劃與調度領域[2]。國內方面,文獻[3]中研究了STN表達時間沖突、資源沖突的方法,并提出沖突檢測與消解方案;文獻[4]中將STN應用于作戰流程資源沖突的檢測和消解;文獻[5]中提出利用STN方法解決敏捷衛星調度的時間約束推理方法。國外也開展了很多基于STN方法的業務流程和規劃時間研究[6]。文獻[7]中提出STN中約束之間的動態平衡方法;文獻[8]中提出STN從全局考慮以代價最小的方式解決沖突,其特點是通過沖突檢測確保計劃在相關時序約束下順利完成。上述文獻的研究成果表明,STN方法可有效用于解決時間沖突問題,但現有研究成果未針對衛星內多系統之間協同工作場景下的時間沖突給出解決方案。
本文提出一種應用STN進行遙感衛星工作模式時序設計的方法。對衛星工作模式進行動作分解,利用STN圖形表示不同約束條件,并通過檢測是否存在時序沖突以驗證設計的正確性。高分七號衛星的應用結果表明:本文方法適用于復雜遙感衛星的工作模式設計,可應用于同類型遙感衛星工作模式設計中。
1 應用STN的工作模式設計方法
1.1 STN相關概念
在利用圖形表達時間網絡之前,更直觀的方法是利用不等式組進行第一步約束的建立。簡單時間問題(STP)是一個特殊的約束滿足問題,它可表示為一個二元組
可見,求解STP的本質就是求解一組形如an≤Xj-Xi≤bn的約束不等式。這種二元約束不等式比較特殊,其系數有一個為1,另一個為-1,稱為差分約束。一般把差分約束不等式轉化為圖的形式,利用圖算法來判斷其一致性和求解。具體轉化方法為:將時間變量X={X1,X2,…,Xn}表示為圖中的點,將約束an≤Xj-Xi≤bn表示為一條弧Xj→Xi,其權重用區間[an,bn]標記。這樣,STP就轉化為一個特殊的加權有向圖STN。
如圖1所示,進一步把an≤Xj-Xi≤bn轉化為Xj-Xi≤bn和Xi-Xj≤-an兩個不等式,分別用兩條弧Xj→Xi和Xi→Xj表示,前者權重為bn,后者權重為-an,得到一個一般的加權有向圖,稱為STN的距離圖(Gd)。STP,STN,Gd之間的轉換如圖1所示,三者之間的關系實質上是等價的[2]。

圖1 STP,STN,Gd之間的轉換關系Fig.1 Transformation relationship among STP, STN and Gd
遙感衛星具有載荷多、并行工作需求多樣化等特點,衛星各分系統、單機、部件按照一定資源約束、時間約束協調工作的結果,即組成遙感衛星的工作模式設計。利用STN,可將遙感衛星工作模式設計問題抽象為簡單時間問題,求解得到設計結果。
1.2 工作模式動作分解
在不同工作模式下,參與工作的星上設備或裝置是不同的。驅動星上設備工作或停止工作的過程定義為一個“動作”,這樣一次工作模式可分解為多個不同動作的集合。表1給出了通用遙感衛星不同工作模式所包含的動作。在每個工作模式下,各種動作之間都有特定時序約束。該約束一般包括動作本身需要持續的時間和相對基準動作的時間兩個方面。遙感衛星通常對于設備啟動、姿態機動、天線預置等動作要提出持續時間的要求;對于有先后時序要求的不同動作,如順序開機、單向數據傳輸等,需要提出相對基準動作的時間約束。表2給出了不同工作模式下各動作時序約束的典型值。

表1 不同工作模式包含動作列Table 1 Actions contained in different working modes
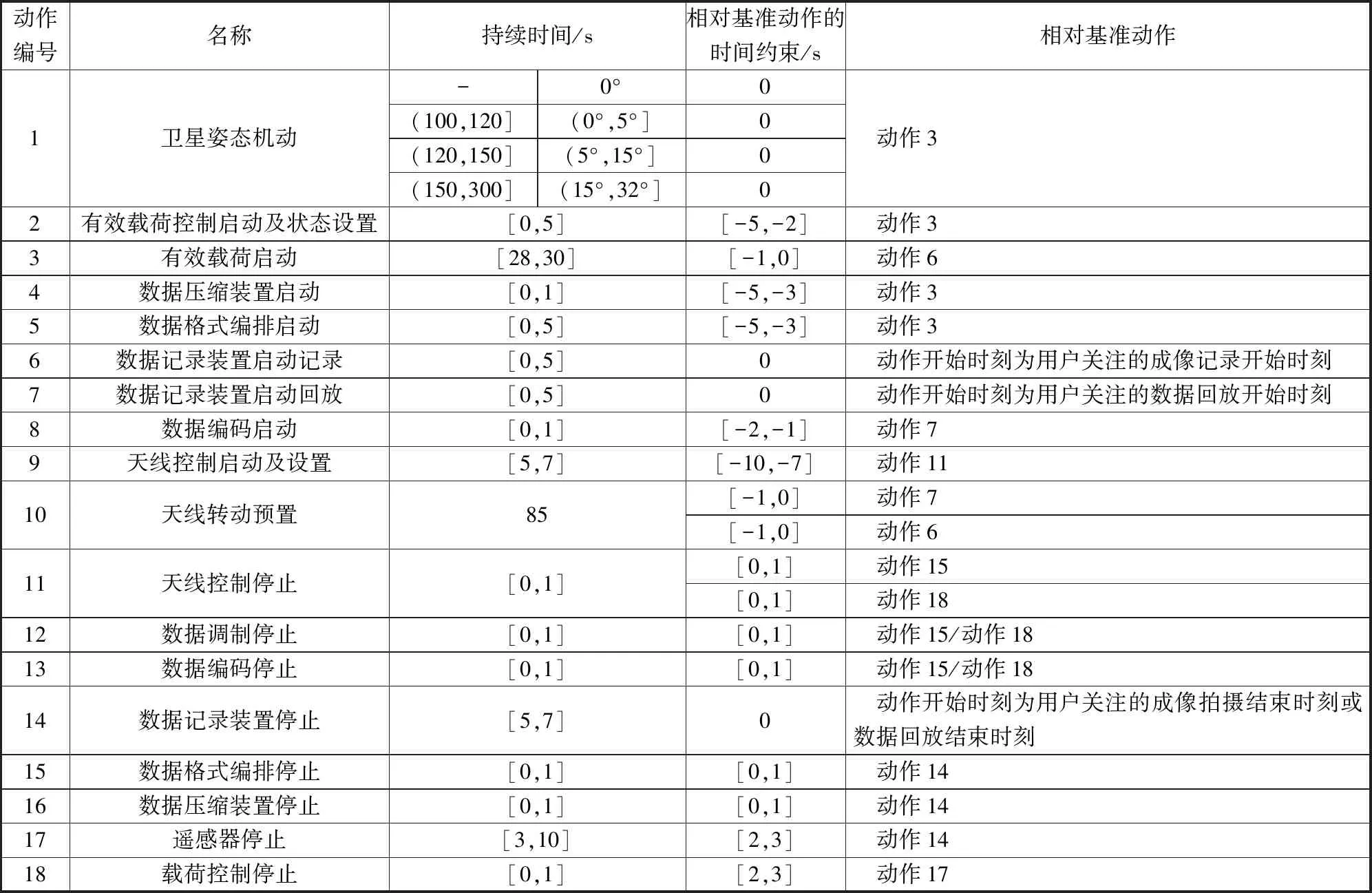
表2 不同動作時序約束Table 2 Timing constrains of different actions
1.3 應用STN的時間表示和推理
下面介紹依據任務時間約束關系建立STN的方法。首先,根據不同工作模式,用時間點變量或區間變量表示任務中的動作,用箭線表示時序關系,得到定性約束網絡。其次,根據具體約束把時間區間變量轉化為時間點變量,并把定性約束轉化為定量約束,為后續時間約束一致性檢驗與沖突處理等工作提供前提模型。常見的定量約束及其STN表示如表3所示。
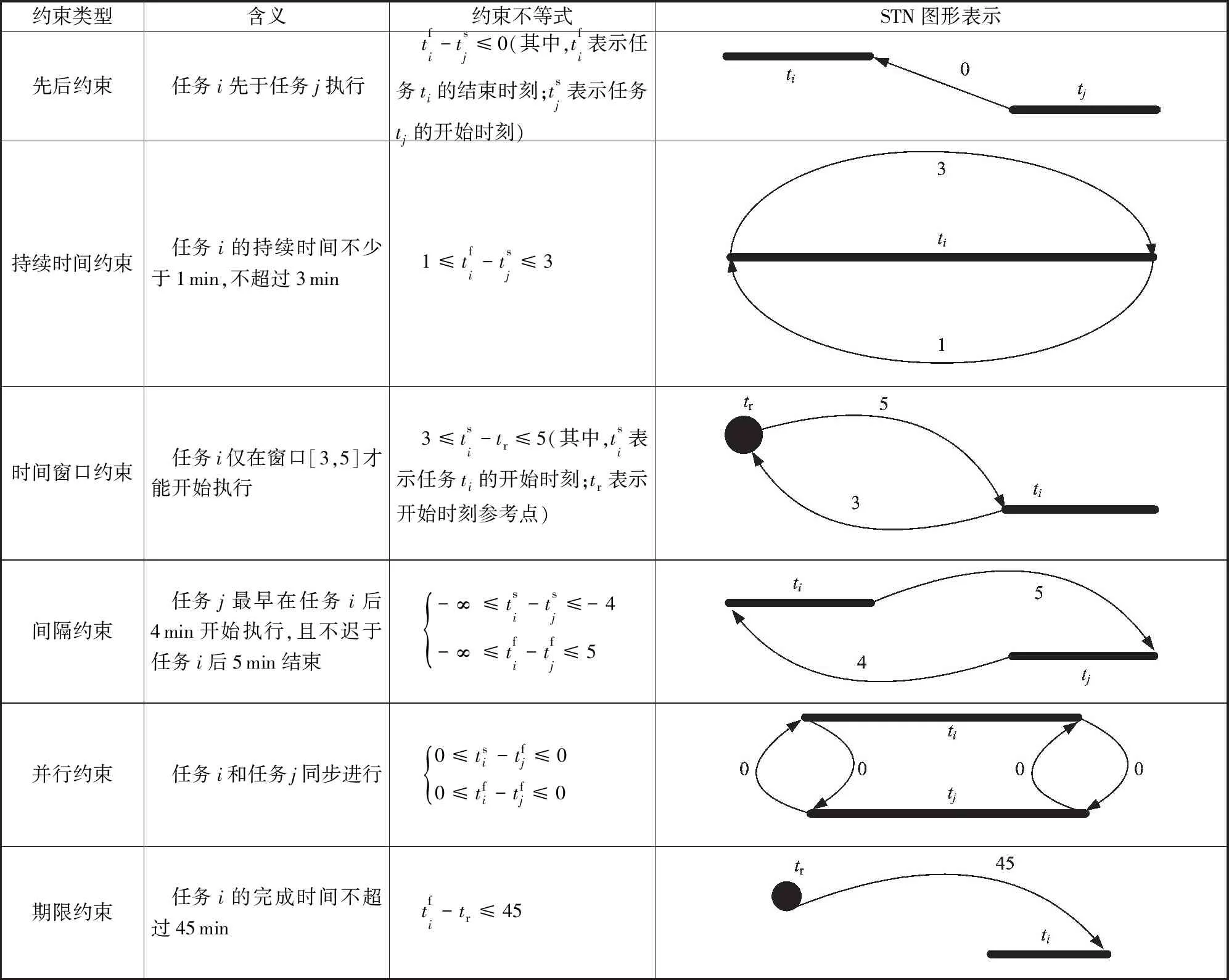
表3 STN圖形表示示例Table 3 STN graphic examples
1.4 時序設計中時間沖突處理
STN時間網絡模型是一種用于描述任務之間時序關系的加權有向圖,具有表達能力強、計算方便和便于時間管理等優點[2]。應用STN時態表示模型和基于Gd的時態推理方法,提出時間沖突檢測方法。Gd有向邊的權值可正可負,可以很好地表示STN的時間約束關系,進行負環檢測。每個STN都對應一個Gd,對STN的時間沖突檢測實際上轉化為Gd來研究。Floyd-Washall算法[9]可用于計算Gd中任意兩點間的時間最短路徑,得出最短路徑矩陣。依據最短路徑算法的性質,如果對角線出現負數,說明有負環存在,判定方案有時間沖突;否則,進一步優化方案。最后,利用最短路徑矩陣計算Mij(任務i和任務j時間約束范圍),以此優化任務時間方案[10]。
遙感衛星工作模式時序沖突檢測方法描述如下。
(1)建立遙感衛星工作任務時序關系的STN,對衛星任務計劃進行建模。
(2)轉化STN對應的Gd,利用Floyd-Washall算法計算最短路徑矩陣,若對角線出現負數,轉入步驟(3);否則轉入步驟(4)。
(3)搜索沖突路徑節點并輸出。
(4)計算Mij,按照任務要求的開始時刻和執行任務允許的時間范圍,優化時間方案。
最短路徑是圖論研究中的一個經典算法問題,一般來說,就是從給定的網絡中找出任意兩點之間距離最短的一條路徑。Floyd-Washall算法是計算任意兩點間最短路徑的較好算法[9],主要計算最短路徑矩陣和前驅矩陣這兩個參數。其中,最短路徑矩陣可以用來表示圖上任意兩個時間節點的最短路徑,前驅矩陣可以表示最短路徑的全部節點的時序關系。Floyd-Washall算法可求得每對頂點之間的最短路徑,其中權可為負值。Floyd-Washall算法的描述見圖2。

注:n表示任務數量;i表示起點任務;j表示終點任務;k表示中間某任務;dist表示任務時間節點間路徑距離。
2 高分七號衛星應用實例
2.1 工作模式STN圖形建立
依據表2動作時序約束,本節將以記錄模式為例建立高分七號衛星的STN圖形,如圖3所示。記錄模式下對應的Gd如圖4所示。圖中1,2,3等號碼代表的是表1和表2中的動作編號。

圖3 記錄模式的STN圖形Fig.3 STN graphic of recording mode
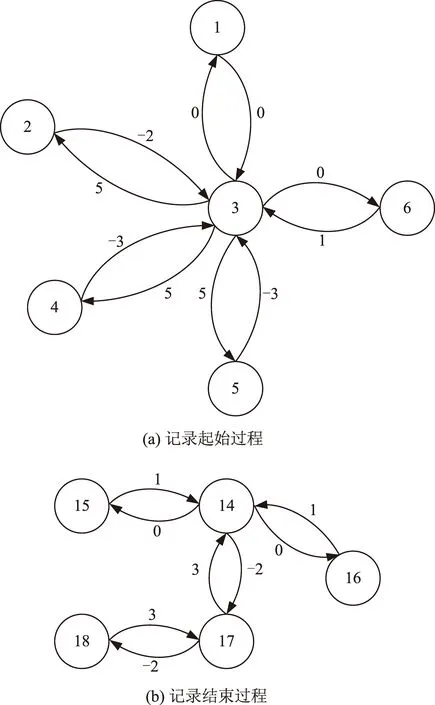
圖4 記錄模式的GdFig.4 Gd of recording mode
2.2 沖突檢測和分析
對于記錄模式下的Gd,可以得出任意兩點的最短距離矩陣,如表4和表5所示,可得記錄起始過程和記錄結束過程動作間有向邊的取值范圍,如表6和表7所示。

表4 記錄起始過程Gd的最短路徑Table 4 Shortest Gd path of record starting process
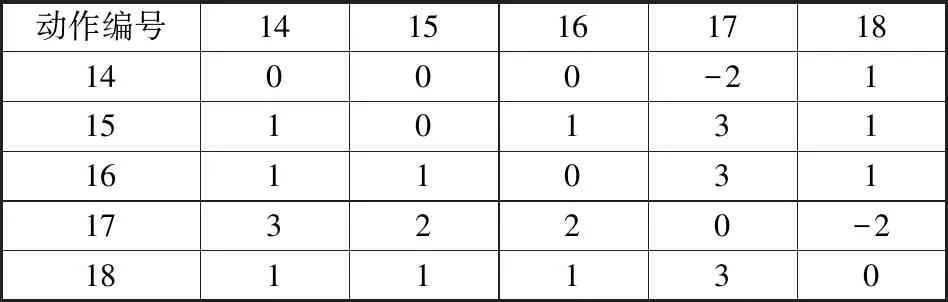
表5 記錄結束過程Gd的最短路徑Table 5 Shortest Gd path of record ending process

表6 記錄起始過程動作間有向邊的取值范圍Table 6 Value range of directed edge between actions of record starting process

表7 記錄結束過程動作間有向邊的取值范圍Table 7 Value range of directed edge between actions of record ending process
例如圖5記錄起始、結束的路徑中共存在9個閉環,均由2個節點組成,經計算權值相加均大于或等于0,因此不存在負環,表明上述路徑不存在沖突。可見,本文方法將高分七號衛星各工作模式中多項動作的時序設計工作由原有的人工手動設計,升級為通過STN來表示動作之間的時間約束并驗證求解的過程。相比原有傳統遙感衛星的設計方法,本文方法更適用于解決復雜衛星系統的情況,可由算法保證設計結果中不存在時間沖突,且設計結果為該約束條件下的最優解決方案。
3 結束語
本文提出了一種應用STN的遙感衛星工作模式設計方法,提出典型工作模式及其STN圖形的表示形式,以及應用STN時態表示模型的時態推理方法,得出了時間沖突檢測、任務起始時刻和執行時間間隔的可行解。高分七號衛星的實用結果表明:本文方法能夠應用STN圖形實現遙感衛星工作模式時序設計和檢測時序沖突,可有效輔助遙感衛星總體工作模式時序設計,對遙感衛星總體設計工作具有一定的參考價值。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
Coco薇(2017年5期)2017-06-05 08:53:16
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41