綜合管廊吊軌式巡檢機器人系統應用探究
2020-07-20 07:55:06張津
智能建筑電氣技術 2020年3期
張 津
(深圳市市政設計研究院有限公司,深圳518029)
0 引言
1 系統框架
巡檢機器人系統以監控平臺為基礎和核心,由巡檢機器人軟件模塊、軌道總成、供電總成、通信總成、巡檢機器人本體及其他相關設備組成,通訊傳輸采用TCP/IP 綜合數據網絡+WiFi 無線信號網絡相結合一體的網絡通訊系統,以達到遠程集中監測、集中顯示報警、集中聯動控制和集中管理的目標。 如圖1 所示,為巡檢機器人系統架構圖。
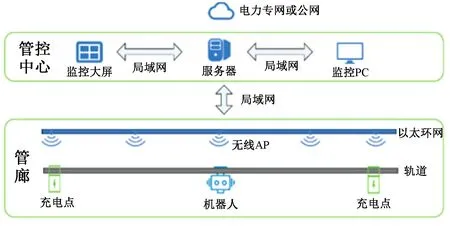
圖1 巡檢機器人系統架構圖
2 系統應用
2.1 機器人設置
機器人是整個系統的核心組成部份,承擔管廊內巡檢和現場處置的主要作用,其本體具備機器人自檢、視頻監控與圖像識別、紅外成像與火災監測、環境監測、語音對講等功能。
機器人橫斷面布置:在工藝專業進行管廊橫斷面設計之時,需考慮機器人的運行空間(目前主流機器人尺寸為400mm×400mm),統籌各專業設備在艙室頂部的排放布置,其中沿管廊通長布置的設備主要為消防滅火裝置、電氣照明燈具、自用線槽以及機器人軌道,設計時應保證各設備的正常運行不受干擾。 若斷面空間受限,可在滿足規范要求情況下,利用管廊豎向上的空間保障設備正常運行。 具體布置如圖2 所示。
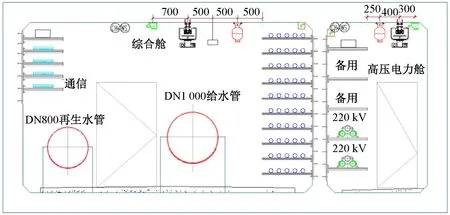
圖2 巡檢機器人橫斷面布置圖
目前機器人的運行速度為2.5m/s。 假設機器人在最不利的位置時管廊發生警報,應保證其在15min 的響應時間內到達事故現場,同時結合當前巡檢機器人的造價指標等因素考慮,在設計區域布置時按每2 000m 巡檢區域配置1 臺巡檢機器人,可經濟、高效地實現對管廊狀態連續、動態的數據采集及系統存儲。
2.2 附屬系統設置
2.2.1 供電系統
巡檢機器人采用分布式充電樁為其供電。 充電樁在設計時,應根據機器人電池容量、充放電時間,結合運行工況和防火門間隔、應急響應速度等因素進行布置,并留有一定的安全余量,以滿足機器人巡檢過程中電力供應的可靠性要求。
經過多個管廊項目應用經驗,設計可按照每1 000m 巡檢區域設置1 套分布式充電站,每個充電站軌道安裝1 個充電座。 充電站采用艙室內就近配電箱交流220V 作為電源輸入,具備浪涌防護能力。充電電壓為34 ~42V,充電電流為2 ~6A,功率不超過260W。 巡檢機器人到達充電站時,經系統檢測確認后,開始為其充電,平時斷開,安全可靠。
2.2.2 無線通信系統
GLU、FINS、FFA水平較NF組升高(P<0.05)。HF+LBBR組和HF+HBBR組GLU、FINS、FFA較HF組明顯下降(P<0.05);高脂喂養時,隨著小檗堿劑量增加,FINS水平進一步下降(P<0.05)。
巡檢機器人的通信系統采用高速無線通信方式實現機器人與綜合管廊后臺監控系統的互聯。巡檢機器人所有的控制信號、視頻數據、音頻數據、現場傳感器采集數據及報警信息等通過無線網絡實現遠程的通信和交互。
管廊無線通信系統每個防火分隔內按照每100m 左右配置1 臺無線AP 進行設計。 數據通過每個AP 傳輸到設備間的交換機,并經由光纖環網與管廊的中心交換機實現高速通信鏈接。 如圖3 所示,為機器人通信系統圖。
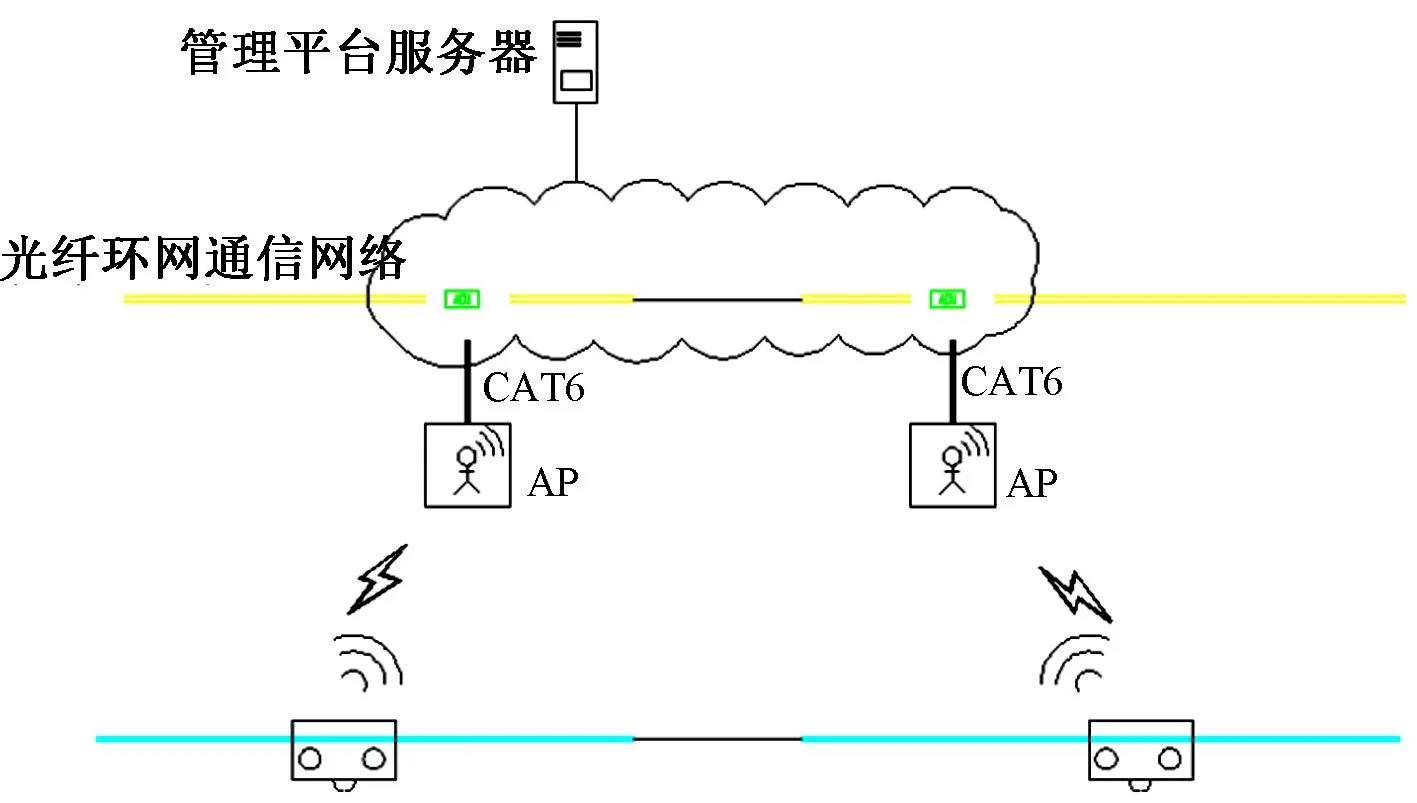
圖3 機器人通信系統圖
為了保證這些數據能夠通過交換機穩定傳輸,交換機采用環形連接的方式,當“通信環”其中一個點斷開時,數據將通過另一個方向進行傳輸,將巡檢機器人現場的工作和巡檢情況實時傳輸到監控中心的數據服務器中。
2.2.3 自動防火門系統
為了使巡檢機器人能夠穿越防火隔離墻,對相鄰艙室進行長距離連續巡檢,需設置專門供巡檢機器人穿越的自動防火門。
在管廊艙室內每個防火分隔上方設置獨立的鋼制甲級防火門,并配備電控系統,最大防火時效可達1.5h。 防火門尺寸不大于500mm(高) ×500mm(寬)。 自動防火門的設計還需要考慮故障安全的原則,在失去外部電源的情況下,應保證防火門處于關閉狀態。
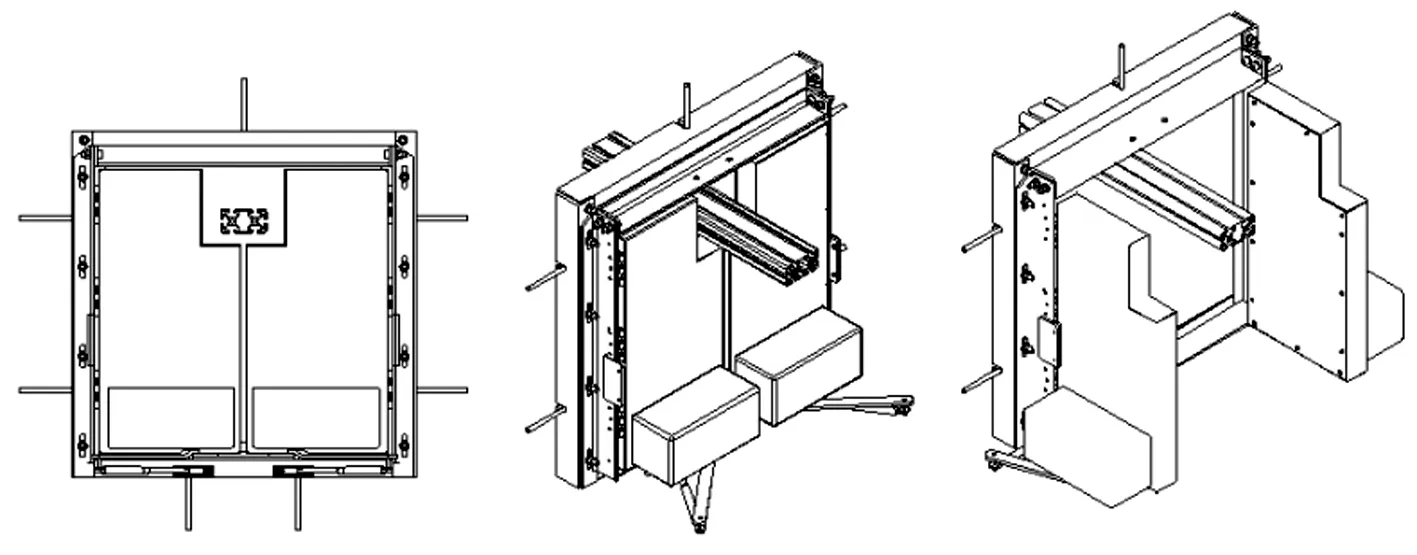
圖4 機器人防火門示意圖
圖4 為機器人防火門示意圖,機器人自動通過防火門的開關門原理為:機器人運行至防火門前1m→給控制器信號→控制器發出開門信號→防火門打開→機器人傳感器檢測門打開狀態→機器人通過→通過1m 后關門→傳感器檢測關門狀態→給控制器已關門信號→完成。
2.2.4 機器人軌道系統
機器人的運行方式采用自動行走的懸掛軌道式設計,巡檢機器人由電機驅動行走,坡道采用在軌道上鑲嵌爬升裝置,滿足大角度爬坡。 機器人軌道單節長度4 000mm、寬80mm,重量達1.5kg/m,沿艙室頂部通長敷設。
地下管廊通過干支結合系統成網,形成了很多T型路口或十字型接口。 因此,當吊軌巡檢機器人遇到分岔路口時,為了讓巡檢機器人能夠到達指定的位置,可以在軌道中安裝換軌裝置,將不同方向的軌道連接起來。 如圖5 所示,為機器人換軌裝置示意圖。
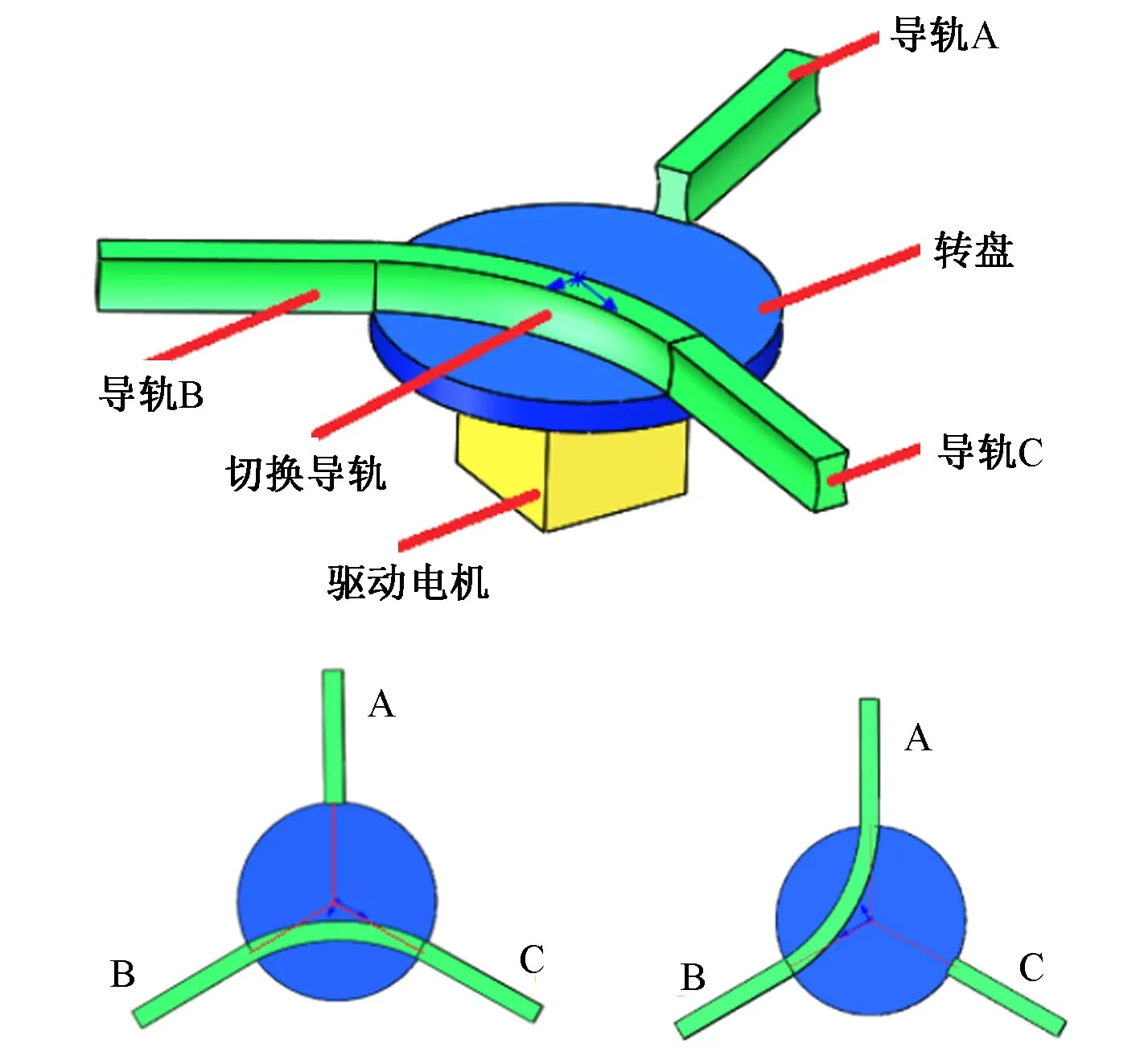
圖5 機器人換軌裝置示意圖
機器人軌道在敷設過程中受管廊路由彎曲度、縱斷坡度及通風口、進料口、逃生口、管線出艙節點等因素影響,可形成弧形軌道,在相關節點位置水平向兩側或垂直方向拐彎通過,拐彎半徑控制在800~1 000mm,圖6~7 為機器人軌道敷設示意圖。
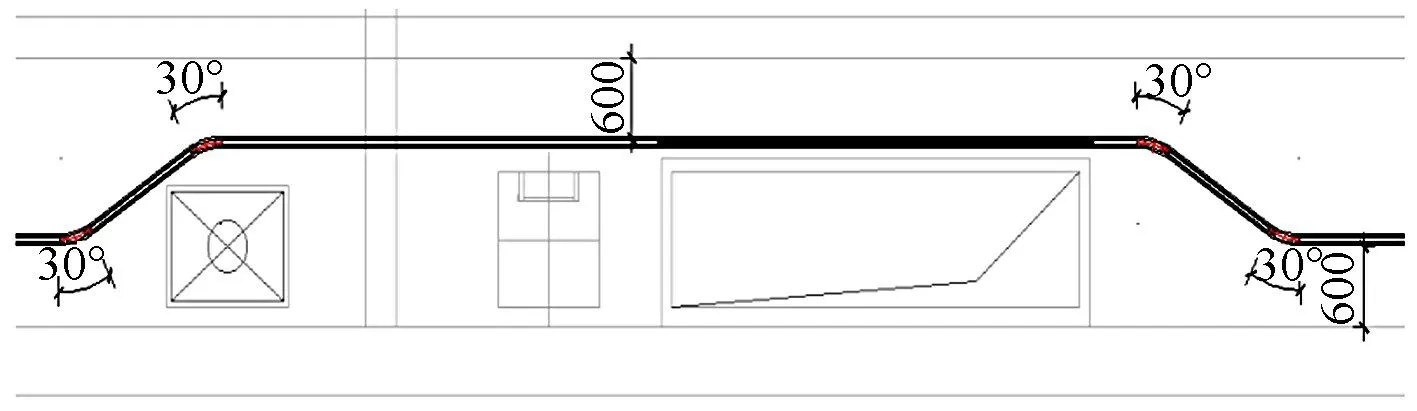
圖6 機器人軌道敷設示意圖(一)
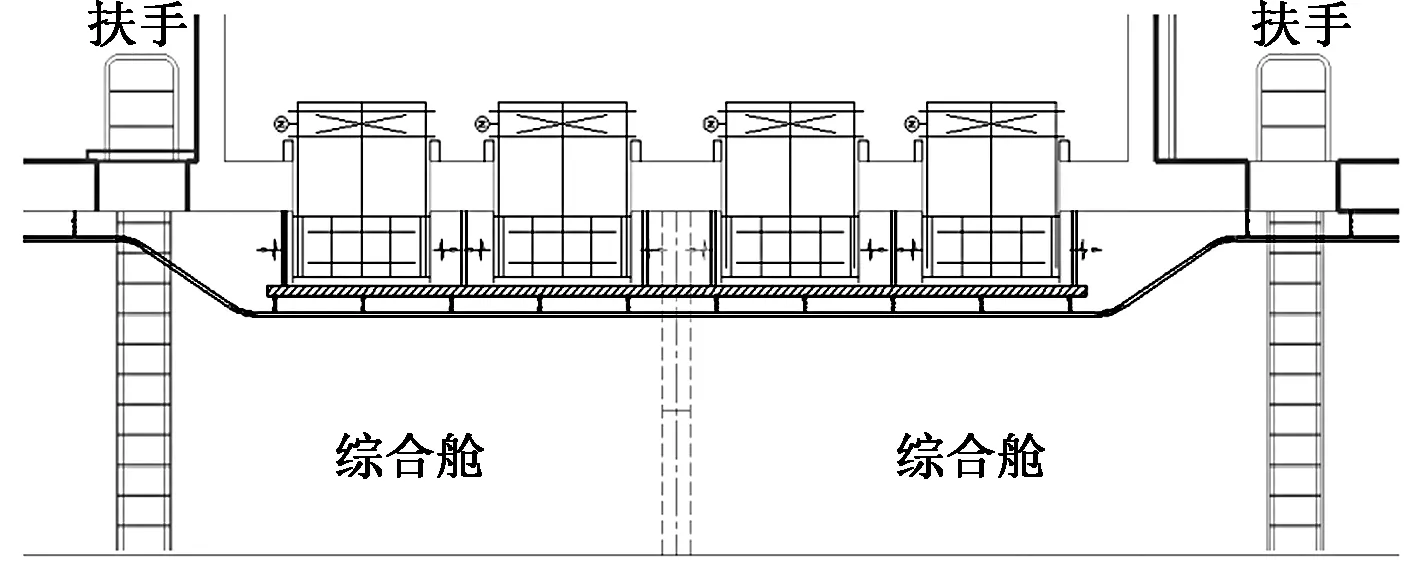
圖7 機器人軌道敷設示意圖(二)
2.3 遠程控制
巡檢機器人的后臺控制系統主要用于對機器人及現場環境的監控,實現機器人與運維人員遠程交互。 運維人員可通過后臺對機器人進行手動操作,并獲取機器人巡檢的數據和機器人工作狀態。
在已經建成的管廊項目中,后臺系統已與監控中心綜合監控平臺有機地結合一起,集成為一個相互關聯和協調的綜合系統。 后臺控制系統作為智能化的信息中轉站,將機器人的巡檢數據按照規范要求進行存儲和分發,用于現場的安全管理和技術診斷。 圖8 為綜合監控平臺展示示例。
3 結束語
綜合管廊在設計之初就應考慮適用機器人巡檢的結構化環境,優化巡檢機器人設計和安裝步驟,降低機器人成本,提高機器人運維的可靠性。
隨著人工智能和機器人技術的快速發展,綜合管廊巡檢機器人將不斷實用化,并逐漸替代運維人員實現智慧管廊的少人或無人值守,顯著降低巡檢人員勞動強度,提高巡檢效率和質量,保障城市生命線工程的安全,提升綜合管廊的智慧安全管理水平。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國共青團(2015年7期)2015-12-17 01:24:38
