快速測量駕駛員A柱雙目障礙角方法探討
2020-07-20 03:24:56顧楊丹
汽車世界·車輛工程技術(上) 2020年3期
顧楊丹

摘 要:根據GB 11562的要求研制一套快速測量駕駛員A柱雙目障礙角的檢測裝置,用此裝置測量雙目障礙角并與單臂三維測量劃線儀的測量結果進行比對。
關鍵詞:雙目障礙角;檢測裝置;比對
0 引言
汽車自19世紀末誕生至今100余年期間,汽車工業從無到有,以驚人的速度發展。汽車是數量最多、普及最廣、活動范圍最廣泛的重要的現代化陸地交通工具,2019年全球汽車年產量已接近1億輛。汽車數量的增多導致汽車碰撞事故越來越頻繁,行車安全也越來越受到人們的重視[1],汽車駕駛員前方視野成為不可或缺的一個衡量標準。
所謂駕駛員前方視野是指駕駛員前方180°范圍內的直接視野。目前國內外測量駕駛員前方視野通常利用懸臂坐標測量機或便攜式坐標測量機,配合三維H點檢驗裝置及數據運算方式表進行汽車駕駛員前方視野的檢測。懸臂坐標測量機測量取點范圍大,但需要專用測量場地,對環境、人員操作技能要求較高,維護保養成本高;便攜式三坐標檢測方案對場地要求不高,但測量范圍小,要完成駕駛員前方視野的檢測需進行轉站操作,同時由于是手動取點,測量誤差大,速度慢,對操作人員經驗及能力要求較高。運用幾何關系編寫一套數據運算公式,通過坐標測量機取點后,將點的坐標輸入運算公式,通過不斷逼近的方法找到符合要求的點,最終通過運算公式計算出需要的數值。在尋找符合要求的測量點的過程中耗費了相當多的時間,不利于快速有效地開展試驗。
為了解決這一問題,提高駕駛員前方視野測量的速度及準確性,簡化測量程序,縮短測量時間,提升工作效率,節約測量的人工成本,研發了一套專門的測量設備。通過調節夾具,多套激光模組及低速步進驅動器快速準確地測量駕駛員前方視野。本文主要介紹運用這套設備快速測量駕駛員側A柱雙目障礙角的測量方法。
1 測量裝置
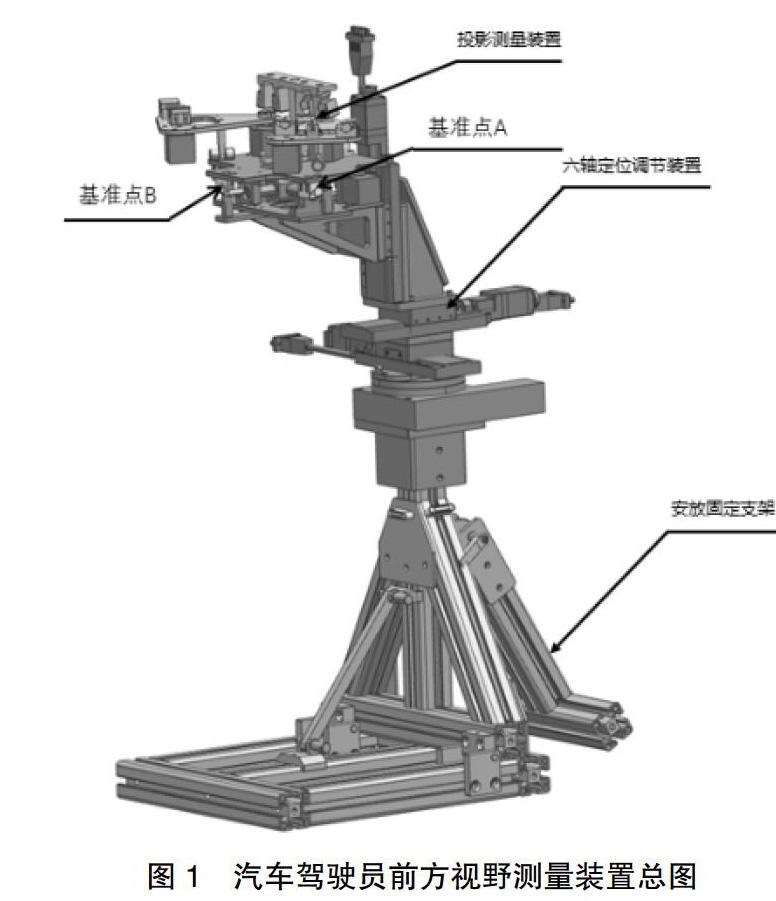
本套設備基于GB 11562-2014標準設計而成,三個基準平面也與標準中定義的相一致。X基準平面——垂直于Y基準平面的鉛垂平面,通常規定通過左右前輪中心;Y基準平面——汽車縱向對稱平面;Z基準平面——垂直于Y和X基準平面的水平面。如圖1所示,整個測試設備分三層設計,上層:投影測量裝置,此部分測量裝置通過圓形定位銷和菱形定位銷共同約束,固定安裝在六角定位調節裝置的固定平臺上,方便在檢測過程中實現多種測量要求的快速更換。旋轉臺支撐柱用于調節滑動支撐輪的滑動方向,控制支撐高度,保證探測激光固定臺面(左/右)與激光投影裝置安放臺所在平面平行。滑動支撐輪(左/右)與激光投影裝置安放臺表面接觸,并在其表面滾動,減小旋轉臺控制電機旋轉軸承受的杠桿扭矩。零位光電開關控制探測激光旋轉電機的初始零位,保證每次復位后A柱內沿探測激光器都在同一個位置,從而實現同側A柱內沿探測激光器和A柱外沿探測激光器發射的激光線所在平面趨于平行。定位銷孔和定位塊與激光投影裝置安放臺的定位銷對應,用于檢測裝置的快速定位固定,見圖2。中層:六軸定位調節裝置,該裝置有六個步進電機和一個雙軸傾角傳感器共同組成,通過底部方形孔固定安裝在底部固定支架上。六個步進電機分別對應正常的六個自由度方向(X軸前后、Y軸左右、Z軸上下、Z軸旋轉角、X軸水平角、Y軸水平角),通過這六個電機調節投影測量裝置的位置及角度,使投影測量裝置滿足GB 11562-2014規定的位置要求。下層:安裝固定支架,該裝置放置于汽車駕駛座椅上,用于對X基準平面、Y基準平面、Z基準平面進行粗調,為六軸定位調節裝置進行精調作準備。
2 測量方法
測量時先將設備的支撐底座放置在駕駛員座椅上,緊貼汽車座椅坐墊后部與靠背底部,使用靠背支撐桿支撐于座椅靠背上,保持支撐底座上的水平泡處于水平位置。按照正確的方法安裝其他部件,最后將對應的激光投影裝置安放于平移調節機構上方的支撐平臺上,由于重量變化的原因,再次調節支撐底座水平位置,防止因支撐重量的改變影響水平位置。設備的支撐與連接軸始終保持與地面垂直,X-向、Y-向與Z向都歸位于最初始的狀態。將駕駛員座椅調整至要求的位置,用可滑動的十字游標尺量取設備上基準點A與鎖扣點的X-向與Z-向的相對位置,用刻度尺量取設備上基準點B與鎖扣點在Y-向相對位置,由于設備設計時就把R點與設備上的基準點A、B的相對位置通過機械加工確定下來,這一值是恒定的。“R點”指由車輛制造商為每一乘坐位置規定的設計點,相對于三維坐標系來確定。“H點”指由標準GB 11562-2014附錄C中規定的安放在車輛座椅中的3-D H裝置的軀干與大腿的鉸接中心,“H”點位于該裝置兩側“H”點標記鈕中心線的中點。在理論上“H”點與“R”點一致。放置于駕駛員座椅上的雙目障礙角測量裝置可大致視同于3-D H裝置。將基準點A和鎖扣點X-向、Z-向的相對位置通過換算計算出H點和鎖扣點在X向、Z-向的位置偏差,基準點B與H點的Y向坐標在設計制造的時候就是一致的,故基準點B與鎖扣點在Y-向的距離就是H點與鎖扣點相對偏差。將測量出的H點與鎖扣點的相對位置和R點與鎖扣點理論上的相對位置進行比較,如果偏差小于±25mm,那就認為座椅安裝滿足要求。
設備安裝粗調完畢后,接通電源,啟動駕駛員前方視野檢測控制軟件,通過軟件連接控制箱,并導入控制參數。啟動控制軟件上的“傾角跟蹤”,開始“X向-Y向自動水平”,控制程序依據設定參數進行自動水平調節,調節到位后關閉“X向-Y向自動水平”。打開基準參照激光器,打開基準參數運算功能界面,輸入車輛鎖扣點與R點的相對坐標。由于R點是一個空間不可觸摸的點,測量時不便于采集,通過相對比較容易采集的鎖扣點作為測量調試基準,用配套的十字游標滑動尺測量出設備上的基準點A到鎖扣的X向、Z向的距離,在基準參數運算功能界面輸入對應的偏差。通過計算出來的位置偏差,通過控制軟件控制對應的電機移動或轉動對應的位移或角度。將方向盤的縱向對稱線定義為Y向的基準,用刻度尺測量出正對著方向盤的基準點B與方向盤中心在Y向的距離,在基準參數運算功能界面對應位置輸入。通過控制軟件控制Y向平移電機,位移量為計算出的偏差量。R點與測量設備上的基準點A和基準點B之間的幾何關系通過機械加工將相對位置固定下來,確保彼此的位置恒定不變。通過調節基準點A和基準點B與鎖扣點之間的相對位置,間接調節了R點與鎖扣點之間的相對位置,調整到位后,測量裝置滿足了測量要求,各投射點的位置均處于標準要求的位置,測量結果即為標準中要求的測量值。
根據GB 11562給出的V點相對R點位置,V點是指在乘員艙內,通過前排外側乘坐位置中心線的縱向鉛垂平面,與R點及設計座椅靠背角有關,此點用于檢查汽車視野是否符合要求。P點相對R點的位置,P點指駕駛員觀察其眼睛所在的水平面內的目標時頭部轉動的中心點,Pm點指通過R點的縱向鉛垂面與P1、P2連線的交點。E1、E2之間以及與P1點之間的相對關系,E3、E4之間以及與P2點之間的相對關系,E點指代表駕駛員眼睛中心的點,它們用于評價A柱視野障礙。A柱指位于V點前68mm處橫向鉛垂平面前方的車頂支撐件和不透明零件(如門框,風窗玻璃鑲條以及它們的附件)。嚴格按照標準中要求的各點之間的位置關系,通過機械加工保證各點之間的相對位置準確無誤。如圖2所示,旋轉臺控制電機(左/右)的電機軸中心所在的位置對應GB 11562上的P1、P2點X/Y的坐標值。A柱內/外沿探測激光器(左/右)所在的旋轉中心對應標準中的E1(E3)、E2(E4)。
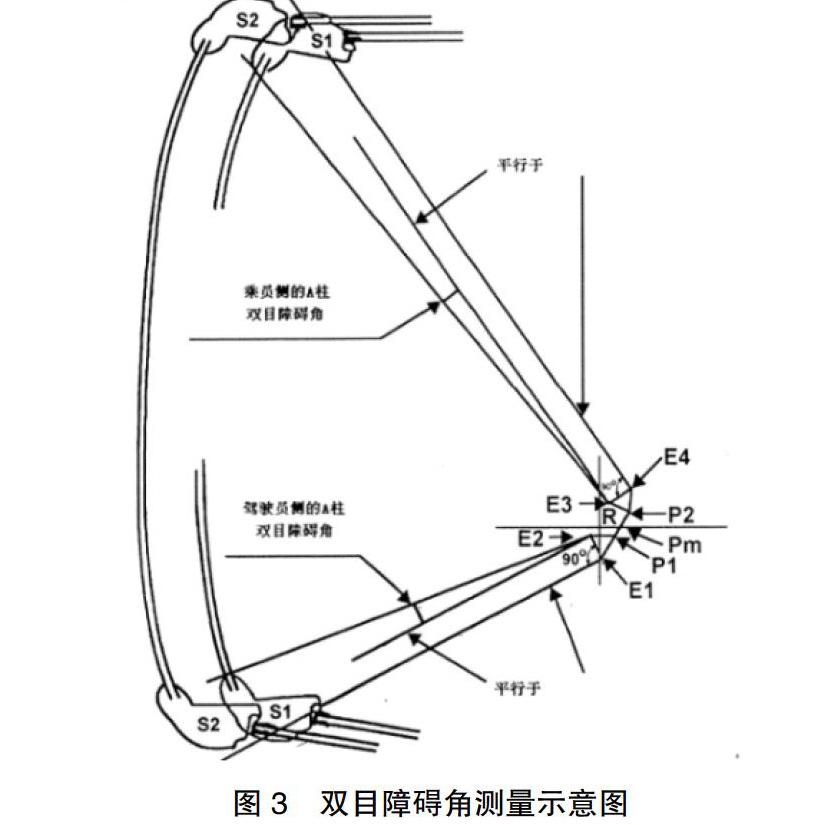
如圖3所示,駕駛員側A柱的雙目障礙角指通過E2、與E1點的S2截面外邊緣的切線相平行的直線和通過E2點的截面S1內緣的切線在水平面上的夾角。從Pm點向前作與水平面向下成5°的平面,過此平面與A柱相交的最前點作水平截面,此截面即為A柱S2截面。測量設備中左邊過Pm點水平向下4度激光器射出來的光線對應著A柱S2截面。轉動P1電機,帶動對應著E1點的左A柱外沿探測激光器的轉動,使A柱外沿探測激光器射出的激光線與A柱外側相切,切點處于S2截面線上,固定P1電機。從Pm點向前作與水平面向上成2°的平面,過此平面與A柱相交的最前點作水平截面,此截面即為A柱S1截面。測量設備中左邊過Pm點水平向上2度激光器射出來的光線對應著A柱S1截面。轉動對應著E2點的左A柱內沿探測激光器電機,與A柱內側相切,切點處于S1截面線上,E2轉動的角度即為雙目障礙角,由設計軟件自動計算。駕駛員右側雙目障礙角測量方法與左側類似,方向相反。
3 總結
為了驗證該套裝置測量雙目障礙角的準確性,將該套設備的測量結果和單臂三維測量劃線儀的測量結果進行比對,看兩者的測量結果是否在公差范圍內,一般車輛設計中對角度的公差為±0.1°。將待測車輛停放至鑄鐵平板上,用劃線機測量出車輛的駕駛員側A柱的雙目障礙角為4.72°,從建坐標到最后得出測量結果共花費了1.2小時。車輛停放在原來的地方不動,將雙目障礙角測量裝置按要求放置于駕駛員座椅上,測量出駕駛員側A柱的雙目障礙角為4.65°,從放置測量裝置到得出測量結果共花費了0.3小時,兩套設備的測量結果和測量時間記錄于表1中。
從表1中不難發現兩套不同的設備測量同一輛車的駕駛員側雙目障礙角,兩者的測量結果均小于標準中規定的6°,測量結果的差值為0.07°,小于±0.1°的公差要求。兩者的測量結果均符合要求,兩者的測量結果差值<0.1°,從測量結果上看兩者的差別不大,但從所花費的時間上來看用雙目障礙角測量裝置遠小于劃線儀所用的時間。用雙目障礙角測量裝置測量耗時短,效率高,更符合現代企業所追求的高效率、低能耗的目標。相較于劃線儀和便攜式三坐標在雙目障礙角的測量中優勢更加明顯,更適合此項目的測量工作。
參考文獻:
[1]陳家瑞.汽車構造:上冊,下冊[M].北京:機械工業出版社,2009.
[2]GB 11562-2014.汽車駕駛員前方視野要求及測量方法[M].北京:中國標準出版社,2014.
[3]ECE R125.關于就駕駛員前方視野批準機動車輛的統一規定[S].歐洲經濟委員會,2011.