基于狀態估計的多機編隊保持技術研究
2020-07-20 16:20:28時磊陳行勇
無人機 2020年2期
時磊 陳行勇

針對工程中通信帶寬有限情況,研究了基于TDMA網絡的多無人機編隊控制發散問題,通過將網絡通信時延轉變為具有時變異步時延的切換拓撲網絡一致性收斂問題,設計了一種基于狀態估計的多機編隊控制協議。
中國人民解放軍91404部隊,河北省秦皇島市066000
多無人機系統協同作戰使用具有分布式、低成本等優點,近年來受到廣泛關注,美國主導的多無人機協同作戰項目的研制、部署、分布式協同作戰逐漸從理論走向工程實現。編隊協同控制是多無人機協同作戰的核心,目前多無人機協同控制研究主要針對時變通信、有界輸入控制、環境擾動等情況下的編隊保持問題。研究成果主要包括領航一跟隨法、虛擬結構法、人工勢場法以及多智能體一致性方法。
本文針對工程中常用的時分多址(TDMA)通信網絡異步時變時延導致多無人機系統內協同信息更新時刻不一致引起的編隊控制發散問題,設計了基于編隊狀態估計的協同控制協議,采用非更新時刻的無人機歷史狀態和卡爾曼濾波器對當前時刻無人機狀態進行估計,實現編隊狀態通信時刻對齊,有效降低了編隊內協同信息等效時延,放寬了網絡存在時變時延情況下一致性理論的收斂上界條件,為一致性理論在多無人機協同控制的工程應用提供支撐。仿真結果表明,該方法能有效提高多機協同編隊的魯棒性,抑制通信時延對編隊保持的影響。
編隊通信模型
網絡拓撲描述
含有Ⅳ架無人機的編隊通信關系可采用圖論中的有向拓撲圖GN進行描述,其中將無人機看作拓撲圖中的一個節點,無人機之間的信息交互看作拓撲圖的有向邊。
無人機編隊數學模型
常用坐標系及轉換
為方便描述無人機運動情況和多無人機編隊隊形,分別選取航跡坐標系和大地坐標系作為參考,定義如下:
(1)航跡坐標系
(2)大地坐標系
(3)大地坐標系轉航跡坐標系
由矩陣論可知,同一向量在不同坐標系的關系可通過變換矩陣描述。定義從Sg到Sk的坐標變換矩陣如下:無人機質點模型
由于無人機協同控制主要對無人機外回路特性進行研究,因此忽略無人機氣動特性、姿態、動力等因素,在航跡坐標系內建立三自由度無人機質點模型。
假設無人機飛行過程中無側滑,且飛行距離相比地球半徑可忽略,可認為地面水平且無旋轉,編隊中第i架無人機的動力學方程為:第i架無人機的運動學方程為:
編隊相對關系描述
假設無人機已形成預期編隊,以四機編隊為例對編隊內無人機空間位置關系進行描述,△i、△j分別表示無人機i和無人機j相對于長機的位置差向量, ξ0 、 ξi\ξj分別為長機、無人機i和無人機j在三維空間中的位置向量,它們之間的對應關系如下:
無人機編隊控制器設計
模型轉化
為方便研究多機協同一致性,將公式(2)所描述的無人機非線性模型轉化為標準二階積分動力學系統模型。記無人機i在大地坐標系中的位置向量ξi=(xi,yj,zi),速度向量ξi= (vxi,Vyj,vzi),無人機編隊協同控制向量ai= (a1i,a2i,a3i)'。對速度向量
問題描述
本文研究的是采用時分多址通信數據鏈的多無人機系統協同編隊保持問題。
為建立時分多址通信網絡模型,不失一般性,考慮由Ⅳ架無人機組成的時分多址有向網絡,通信周期為T,每架無人機所占通信時幀長度T
假設Tk時刻為無人機m通信時刻,記為 ,其余無人機靜默接收,則無人機網絡中無人機i所存儲的無人機j狀態 為:
即時分多址通信網絡模型可轉化為具有整數階時變通信時延的切換拓撲有向圖。
在時分多址網絡中,無人機通信時延非常值,在每個通信時刻及不同的無人機狀態,具有的時延也不一致。網絡中含有的最大時延為:
且隨著無人機編隊規模Ⅳ的增加,通信網絡中所含最大時延呈線性增長。
控制協議設計
為解決上述整數階時變時延切換拓撲情況下的多機編隊保持問題,設計編隊協同控制協議如下:
考慮到無人機協同控制解算周期較短,可近似認為無人機做勻加速直線運動,協同控制量為模型噪聲,設計線性卡爾曼濾波器,對無人機狀態進行估計。
為提高濾波精度,應在每個通信時刻對編隊內所有無人機狀態進行估計,實現協議中無人機狀態時刻對齊。
仿真實例
本節以1架長機和4架僚機組成編隊為例,通過仿真分析,驗證所提出的方法。
采用文中時分多址數據鏈通信,以1號機為長機,2-5號機為僚機,仿真步長10ms,編隊內每架無人機間隔20ms依次發射本機狀態,編隊內5架無人機協同信息更新周期及協同控制周期設置為100mS。
設UAV1為長機,航向正東(x=90°),沿直線航跡定高平飛。編隊內各無人機位置、高度、速度、航向等參數如表1所示。
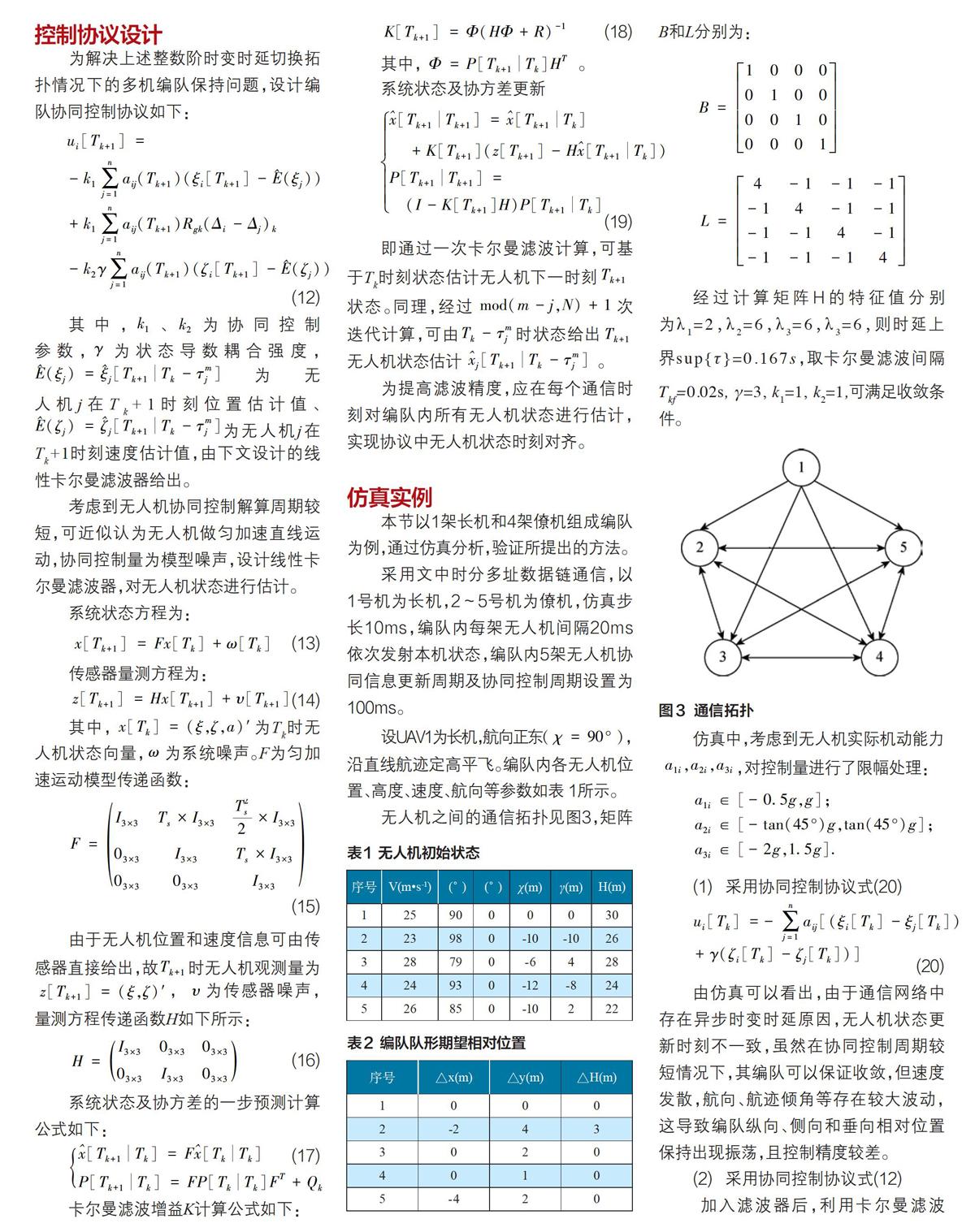
無人機之間的通信拓撲見圖3,矩陣
由仿真可以看出,由于通信網絡中存在異步時變時延原因,無人機狀態更新時刻不一致,雖然在協同控制周期較短情況下,其編隊可以保證收斂,但速度發散,航向、航跡傾角等存在較大波動,這導致編隊縱向、側向和垂向相對位置保持出現振蕩,且控制精度較差。
(2)采用協同控制協議式(12)
加入濾波器后,利用卡爾曼濾波器對短時間內編隊整體狀態進行預測,獲得比無人機歷史狀態更準確的當前時刻狀態估計,可有效減小協同控制狀態誤差。
通過仿真可以看到,采用狀態估計法后,由于在時間上對齊了協同控制律中各無人機狀態,編隊內無人機隊形收斂,相對位置精度保持較好,不存在振蕩現象。
而且短時狀態通過估計獲得,編隊狀態更新不依賴于數據鏈完整更新周期,因此可以做到協同控制周期小于信息更新周期,進一步提高編隊協同控制算法穩定性和編隊控制精度。
結論
本文針對時分多址網絡通信整數階時變時延導致多無人機系統編隊控制精度差甚至發散問題,設計了基于狀態估計的編隊控制協議。理論分析與仿真結果表明:
(1)基于時分多址的數據鏈組網通信系統,其網絡內所含時延時變且隨網絡規模增大而線性增大;
(2)設計了基于狀態估計的編隊控制協議,通過合理設計卡爾曼濾波器參數,利用編隊無人機歷史協同信息,實現了對當前非通信時刻其他無人機狀態估計,解決了協議中狀態信息時刻不一致導致的編隊發散問題,適用于時分多址組網的大規模編隊控制;
(3)本文所提方法能夠有效降低協同一致性協議對通信網絡時變時延上界要求,增強了協議對網絡時延的魯棒性。