大深度水下滑翔機總體設計
2020-07-22 03:35:28葉鵬程黃橋高
數(shù)字海洋與水下攻防 2020年3期
葉鵬程,黃橋高
(1. 西北工業(yè)大學 航海學院,陜西 西安 710072;2. 無人水下運載技術工信部重點實驗室,陜西 西安 710072)
0 引言
海洋開發(fā)和利用勢必需要先進的海洋設備,水下航行器作為一種延伸人類對水下操作和感知能力的海洋開發(fā)和探測工具,獲得了廣泛關注[1]。水下航行器按是否搭載人員可分為載人水下航行器Manned Underwater Vehicle,MUV)和無人水下航行器(Unmanned Underwater Vehicle,UUV)[2]。按照操作方式的不同,UUV又可分為遙控水下航行器(Remotely Operated Vehicle,ROV)、自主水下航行器(Autonomous Underwater Vehicle,AUV)和水下滑翔機(Autonomous Underwater Glider,AUG)[3]。其中,MUV需要人工操作,不適合長時間、大深度航行。而ROV在使用過程中需要母船支援,雖然便于控制,但受纜繩限制,活動范圍有限。由于擺脫了線纜束縛,AUV和AUG活動范圍增大,并且可以在水下靈活使用[4]。AUV在使用過程中具有良好的機動性能,可以按照既定線路航行或定點作業(yè),但是需要消耗大量能源,要求定時補充能源,因此無法保證大深度、遠航程和長時間連續(xù)工作[5]。AUG則依靠自身浮力驅動,耗能極低,能夠更好地進行海洋開發(fā)和利用。AUG不僅具有很好的機動性、可控性和隱蔽性,而且擁有制造成本低、功耗低、噪聲低、航程遠以及工作深度大等優(yōu)勢,符合長時間、大范圍海洋探索需求[6-7]。
為了滿足海洋軍事需要和民用需求,本文介紹了一種水下滑翔機總體設計方法。在水下滑翔機外形設計的基礎上,對主要組成系統(tǒng)進行布局,對殼體進行結構設計。完成滑翔機動力參數(shù)計算,對水下滑翔機進行動力學建模、運動特性分析及航行彈道仿真研究。
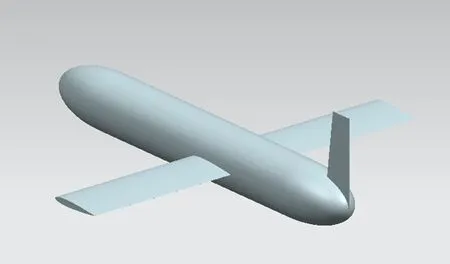
圖1 AUG外形圖Fig. 1 Shape of AUG
1 總體設計與布局
采用三維制圖軟件 Unigraphics NX(UG)對水下滑翔機進行外形設計,如圖1所示。外形由主體、滑翔翼和穩(wěn)定尾翼構成,總長1 800 mm,其中頭尾部采用相同線型,均為半橢球體,中部為平行圓柱體,主體外形設計參數(shù)見表1。滑翔翼采用NACA0012翼型,設計參數(shù)見表2。穩(wěn)定尾翼采用平面薄板。
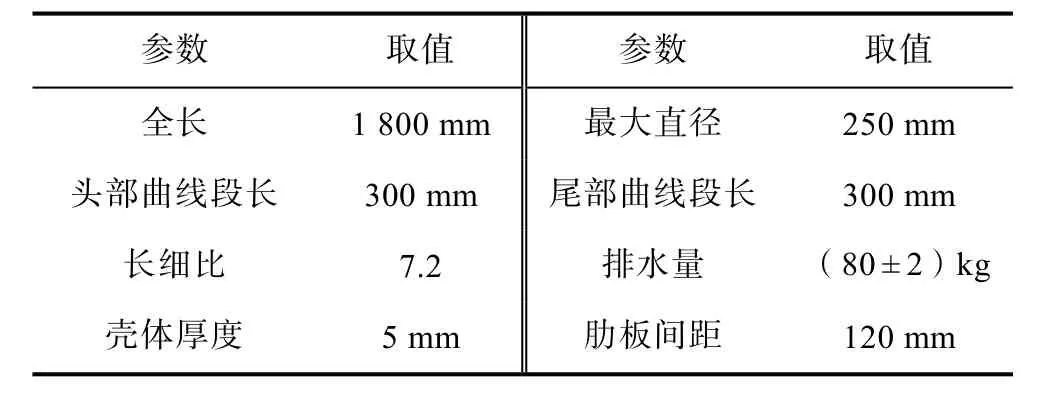
表1 主體外形設計參數(shù)Table 1 Design parameters of AUG body
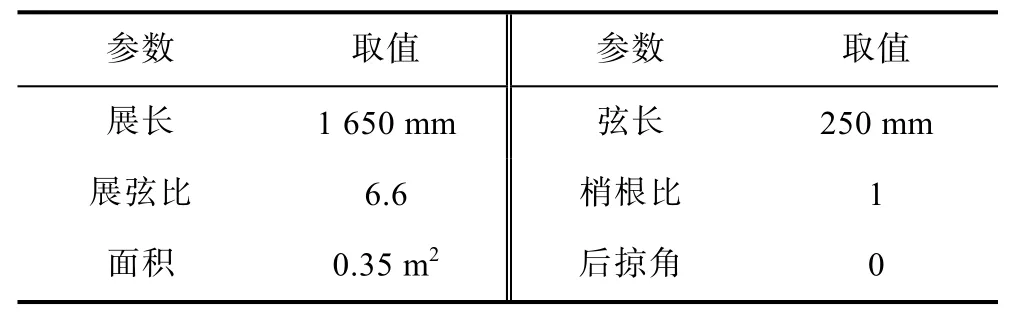
表2 滑翔翼設計參數(shù)Table 2 Design parameters of AUG wings
水下滑翔機主要由6大系統(tǒng)組成:外部耐壓殼體、滑翔翼和尾翼、姿態(tài)調節(jié)系統(tǒng)、變浮力驅動系統(tǒng)、通信控制系統(tǒng)和拋載系統(tǒng)。其中,變浮力調節(jié)機構采用外部油囊式浮力調節(jié)機構,姿態(tài)調節(jié)機構選用滾珠絲桿電池塊傳動機構。各個系統(tǒng)的布局如圖2所示。

圖2 AUG總體布局圖Fig. 2 Overall layout of AUG
2 受力分析與運動建模
2.1 坐標系的定義
為了描述水下滑翔機運動,本文定義3個坐標系[5],即地面坐標系O0x0y0z0、載體坐標系Oxyz(以載體浮心為原點),速度坐標系Ox1y1z1,如圖3所示。水下滑翔機相對地面坐標系的姿態(tài)可用載體坐標系與地面坐標系之間 3個歐拉角θ、ψ、φ來確定。在體坐標系中的重心速度矢量方向則由攻角α、側滑角β確定,如圖4所示。

圖3 3種坐標系示意圖Fig. 3 Three kinds of coordinate systems
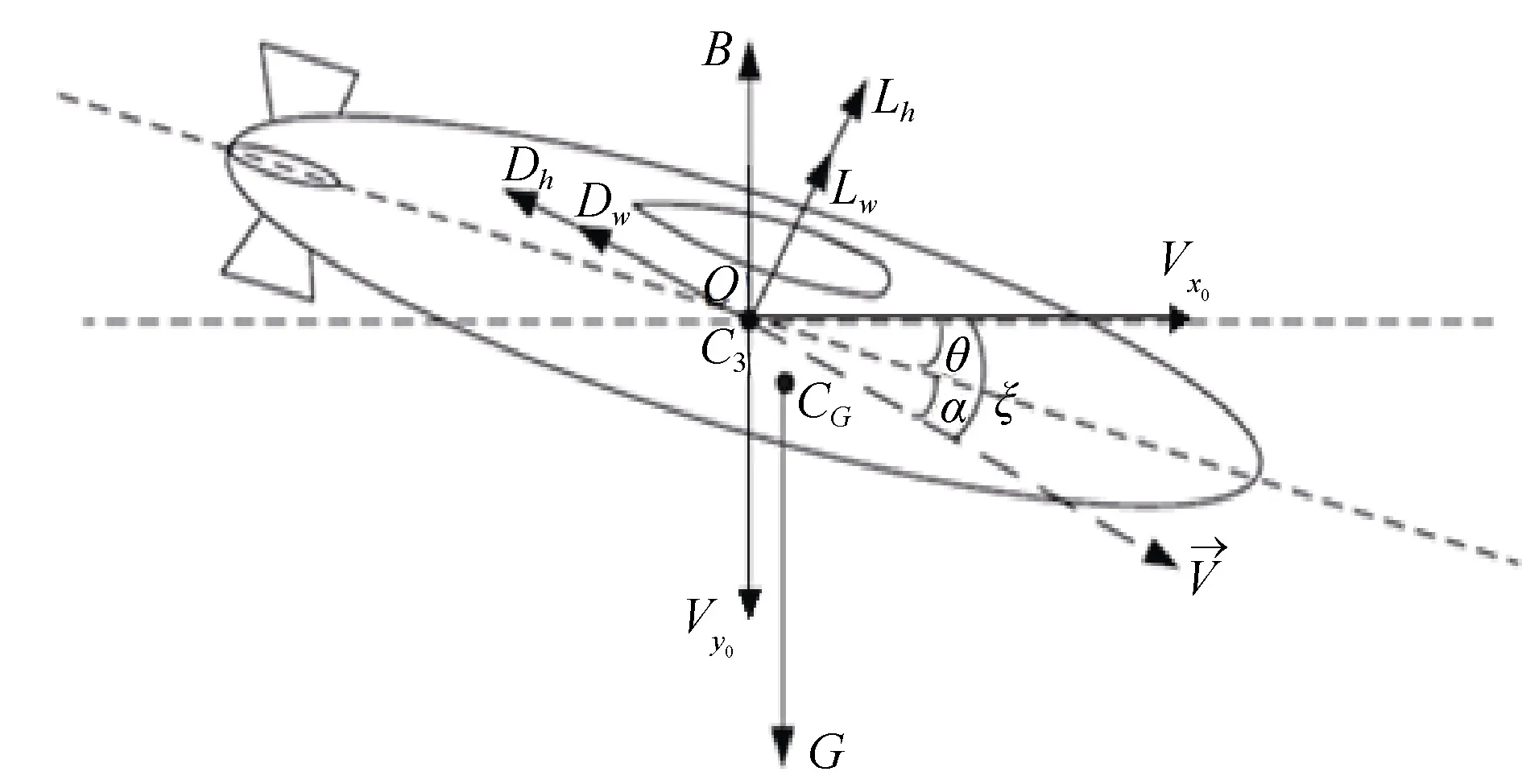
圖4 重心速度矢量示意圖Fig. 4 Velocity vector of the center of gravity
2.2 水下滑翔機數(shù)學模型
基于動量定理和動量矩定理建立空間運動方程較為復雜,本文對其進行簡化并考慮航行器附加質量λ11、λ22、λ26、λ66,得到縱平面內的運動方程[8]

式中:m、m0分別為航行器質量和凈浮質量;xG、yG分別為航行器的重心水平位移和垂直位移;vx、vy、wz分別表示航行器在地面坐標系沿x0、y0軸的水平速度、垂直速度和繞O0z0軸轉動的角速度;D、L、M分別為水下滑翔機阻力、升力和俯仰力矩。
3 定常運動特性分析
定常滑翔是水下滑翔機的主要運動形式[9],研究其運動特性具有重要意義。當水下滑翔機作定常滑翔運動時,其運動參數(shù)滿足如下條件:

式中,C為參數(shù)。
定常運動受力平衡方程如下:

水下滑翔機流體動力參數(shù)計算結果如表3所示。其在定常滑翔運動時基本處于小攻角狀態(tài),即cosα≈ 1 ,sinα≈α。采用數(shù)值軟件MATLAB分析定常滑翔運動特性,具體關系如圖5-10所示。
分析圖7可知,隨著彈道傾角ξ的變化,攻角α的變化是在一定范圍內,不同水下滑翔機由于設計參數(shù)不同,有效攻角范圍也不同。為了防止彈道傾角出現(xiàn)急劇變化,有效攻角需設定在安全范圍之內,即±7°之間。水下滑翔機運動特性研究應該有針對性地在有效攻角范圍內進行,從而避免大量仿真計算和試驗,提高工作效率。
表3 流體動力參數(shù)計算結果Table 3 Calculation results of the hydrodynamic parameters

圖5 Vx0和 ξ、m0關系Fig. 5 The relation amongand ξ、m0
圖6 Vx0和m0關系圖Fig. 6 The relation between and m0
圖7 α與ξ關系圖Fig. 7 The relation between α and ξ
分析圖8可以發(fā)現(xiàn):水下滑翔機攻角α受重心水平位移xG影響較大,隨xG增大而減小,而凈浮質量m0對攻角α影響較小。
圖8 α與xG、m0關系圖Fig. 8 The relation among α and xG、m0
分析圖 9可以發(fā)現(xiàn),重心水平位移xG對滑翔機俯仰角θ影響較大,θ絕對值隨xG增大而增大,而凈浮質量m0對俯仰角θ的影響較小。

圖10 V與xG、m0關系圖Fig. 10 The relation among V and xG、m0
由圖 10可以看出,xG和m0對滑翔機速度V均有一定影響,速度V隨xG和m0單調增加。
4 Simulink彈道仿真
本文研究的大深度水下滑翔機中,變浮力驅動系統(tǒng)采用改變外部油囊體積來改變凈浮力。姿態(tài)調節(jié)系統(tǒng)則由步進電機帶動蝸輪蝸桿減速,再傳動給滾珠絲桿,由滾珠絲桿帶動質量塊滑動。假設變浮力調節(jié)系統(tǒng)勻速調整滑翔機外部油囊體積,即凈浮質量m0是線性變化的,滿足如下條件:

式中:dm為每秒鐘變化質量;t0表示變浮力驅動系統(tǒng)有效工作時間。
另外,姿態(tài)調節(jié)系統(tǒng)每秒鐘移動的滑動質量塊的位移是一定的,即重心水平位移同樣是線性變化的,滿足如下公式:

式中:dx為每秒鐘重心沿Ox軸的位移變化量;tG表示姿態(tài)調節(jié)系統(tǒng)工作時間。
利用 Simulink建立水下滑翔機彈道仿真模塊程序,圖11給出了仿真模型流程圖。初始條件設置如下:速度V、俯仰角θ、角速度Wz、重心水平位移xG、凈浮質量m0均為 0。控制條件和仿真結果分別見表4和表5。

圖11 仿真模型流程圖Fig. 11 Flowchart of simulation model

表4 控制條件Table 4 Control conditions

表5 仿真結果TABLE 5 Simulation results
使用 MATLAB對仿真所得數(shù)據進行分析,結果如圖12-17所示。分析上述結果能夠發(fā)現(xiàn),在凈浮質量為±2 kg,重心水平位移為±0.01 m條件下,水下滑翔機水平速度可以達到1 m/s以上,滿足任務要求。另外,本文設計的水下滑翔機從下潛到上浮的過程轉換大約需要40 s左右,一個完整的下潛上浮周期大約需要3 180 s,調整時間時間占總時間 1.25%。穩(wěn)定狀態(tài)下彈道傾角為±29.6°。
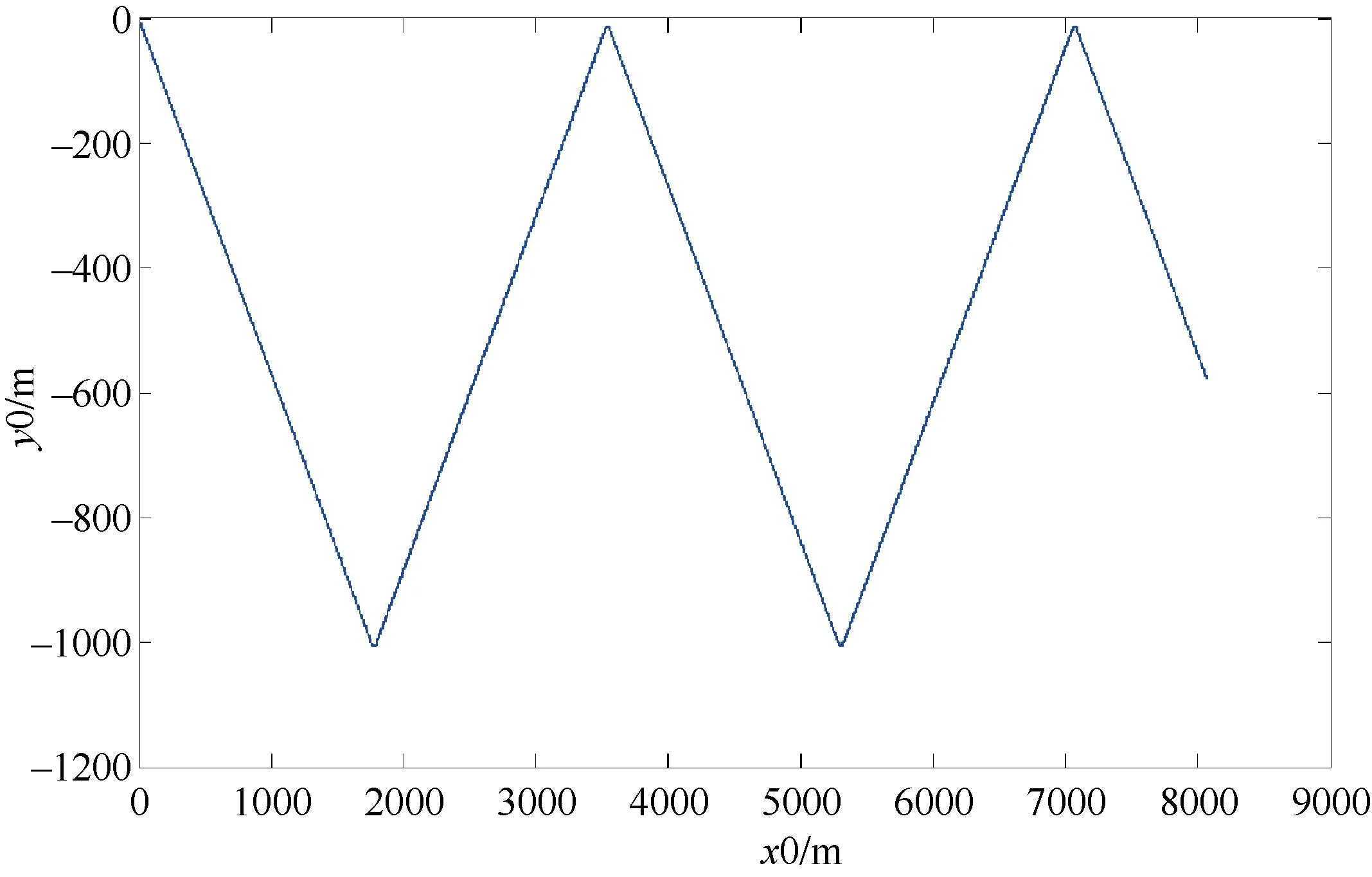
圖12 水下滑翔機彈道圖Fig. 12 Trajectory of AUG
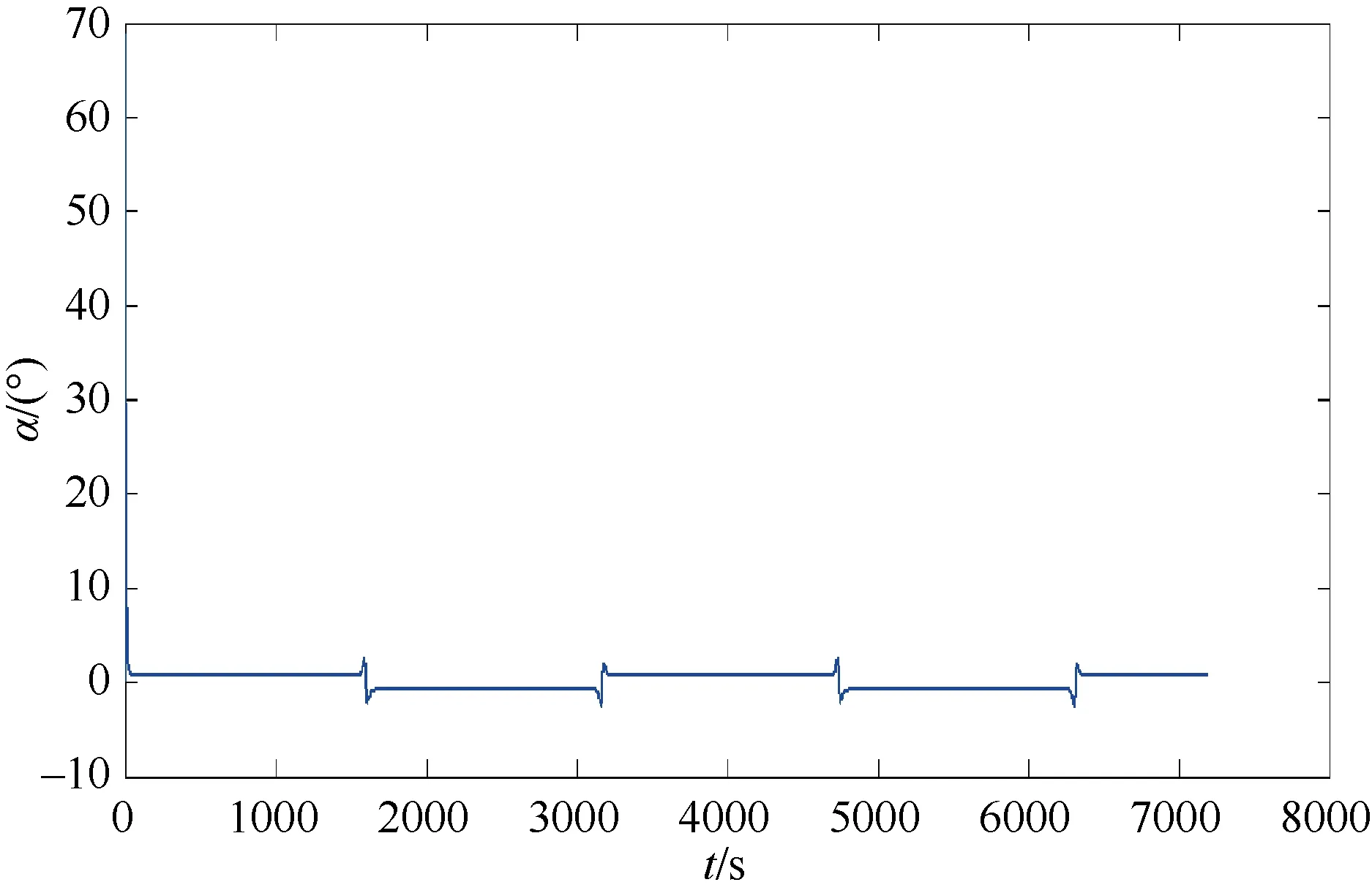
圖13 水下滑翔機攻角變化圖Fig. 13 AOA variation of AUG
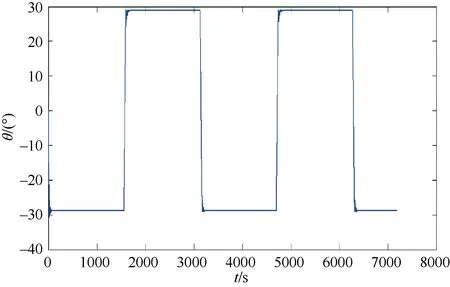
圖14 水下滑翔機俯仰角變化圖Fig. 14 AOP variation of AUG
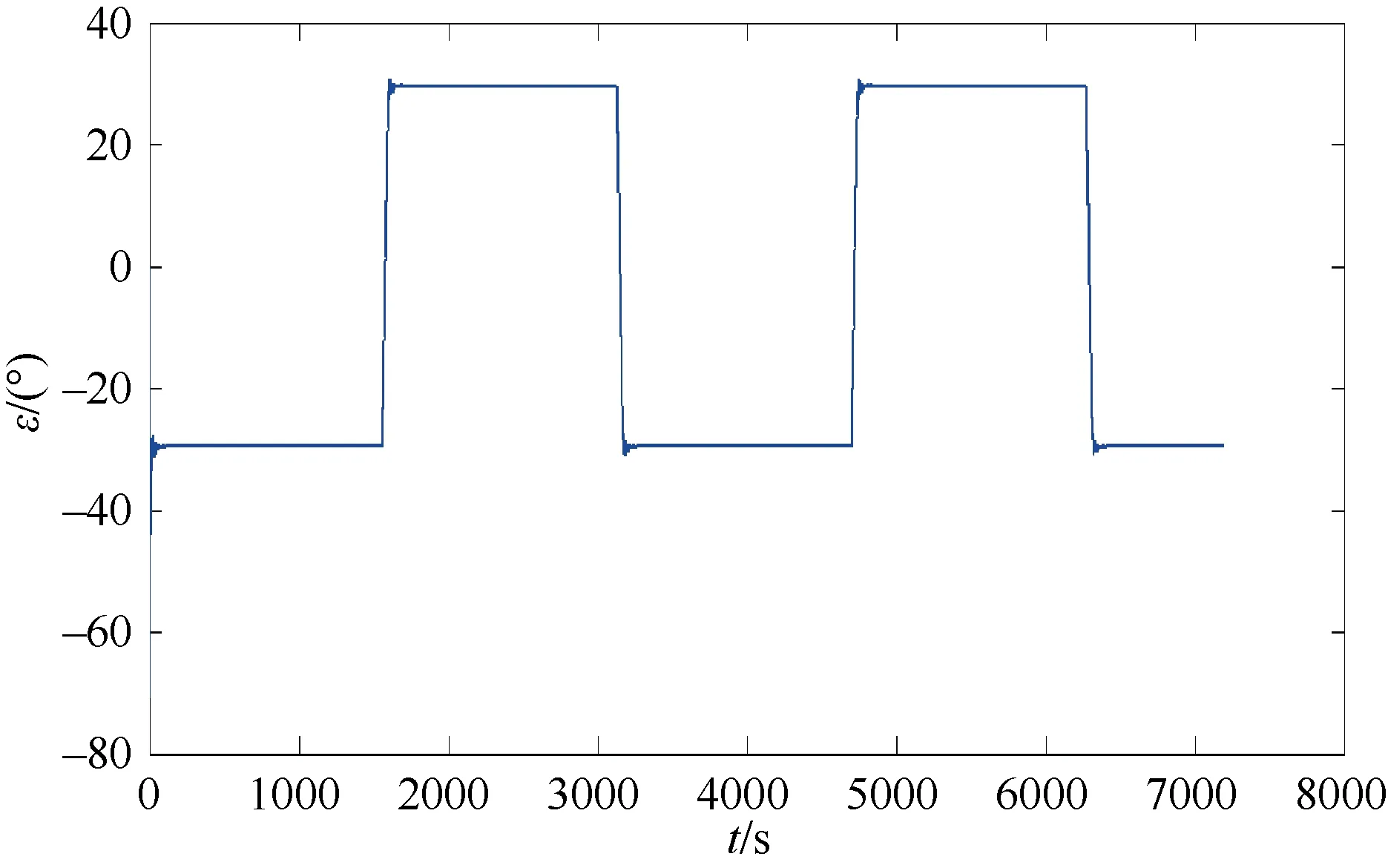
圖15 水下滑翔機彈道傾角變化圖Fig. 15 Variation of AUG’s trajectory inclination angle
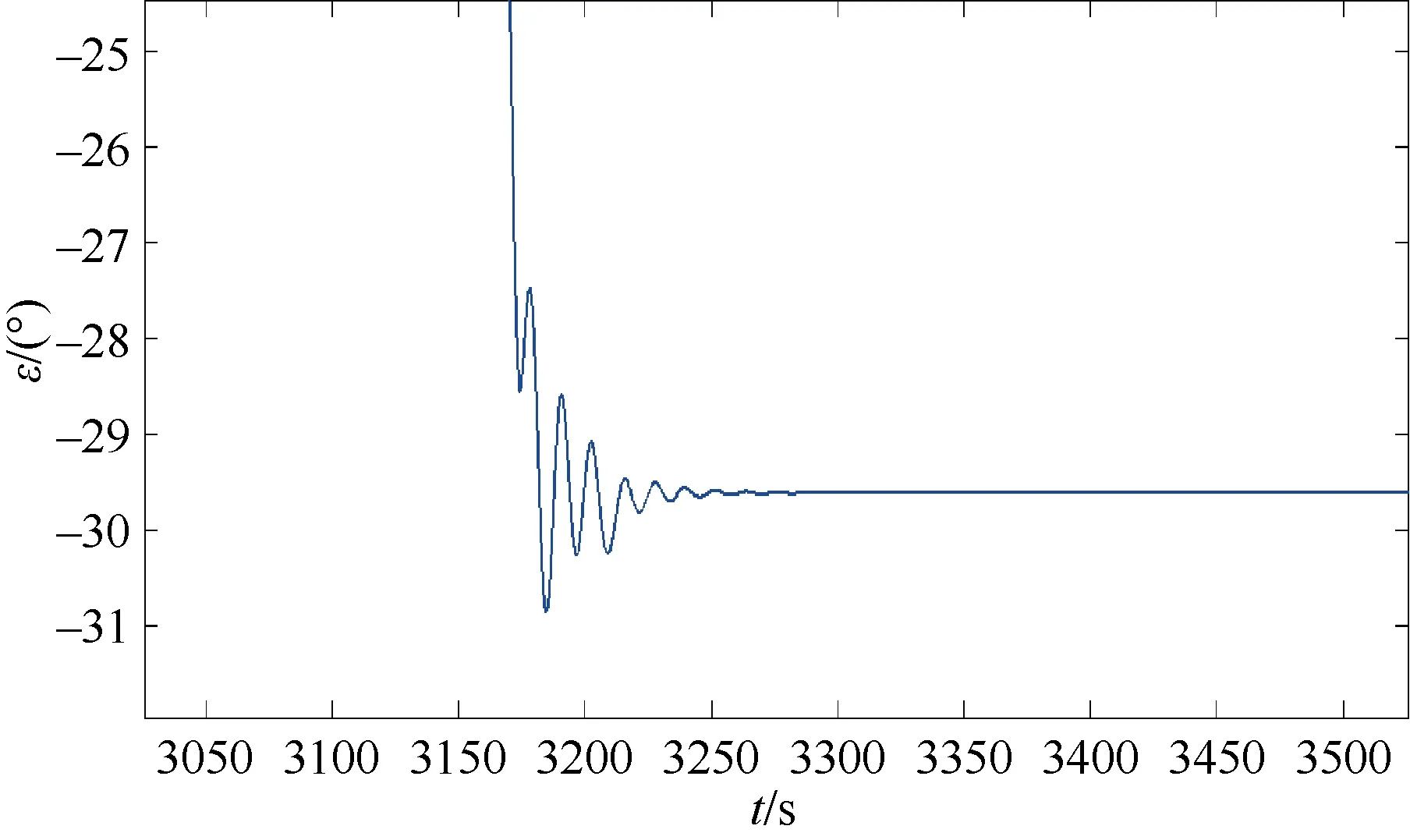
圖16 彈道傾角突變處放大圖Fig. 16 Amplification and mutation of AUG’s trajectory inclination angle
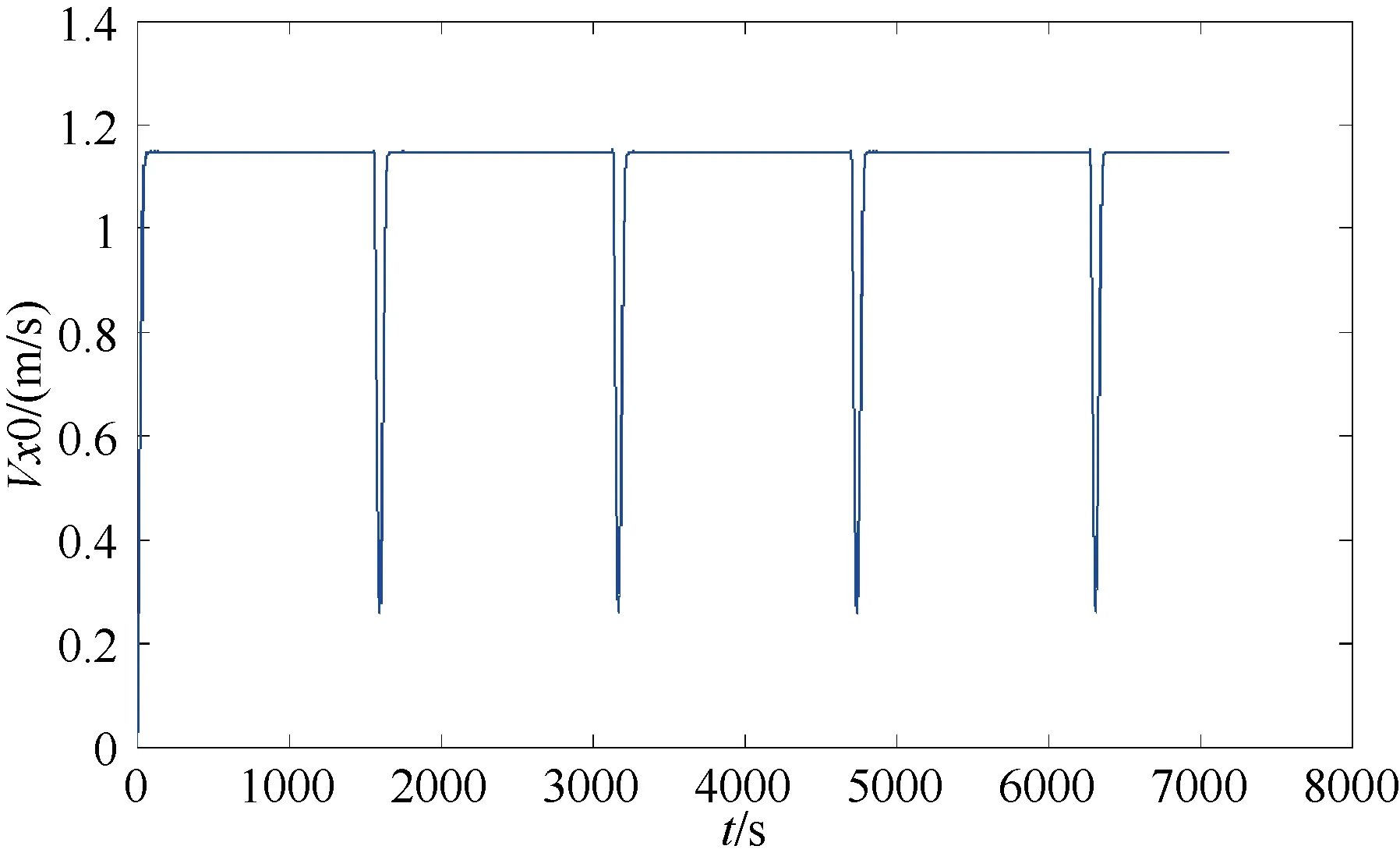
圖17 水下滑翔機水平速度變化圖Fig. 17 Variation of AUG’s horizontal velocity
5 結束語
本文對水下滑翔機外形進行了設計,完成了滑翔機主要組成系統(tǒng)的布局,對殼體進行了結構設計。另外,利用經驗公式完成水下滑翔機流體動力參數(shù)計算,同時采用動量定理和動量矩定理對水下滑翔機進行動力學建模。在此基礎上,完成對水下滑翔機定常運動特性分析,并將分析結果應用到垂直面內的彈道仿真研究中,仿真結果驗證了水下滑翔機總體設計方法的有效性和可行性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國生殖健康(2019年2期)2019-08-23 08:12:08
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12
