低空空域目標防控技術現狀與發展趨勢①
2020-07-22 08:31:56毛謹吳琳擁羅俊海王星蒲桃園
科技創新導報 2020年15期
毛謹 吳琳擁* 羅俊海 王星 蒲桃園
(1.四川九洲防控科技有限責任公司 四川綿陽 621000;2.電子科技大學信息與通信工程學院 四川成都 610000)
隨著飛行器技術的發展,低空空域目標廣泛應用于攝影娛樂、農林作業、環境監控、森林防火等任務,特別是以消費級無人機為代表的低空空域目標,其操作簡單、低成本優勢進一步凸顯,使得大眾紛紛參與到低空空域活動中。在此基礎上,無人機,特別是頻繁的“黑飛”無人機入侵管制空域,對飛機安全運行造成隱患,如北京、上海、深圳、武漢、杭州、昆明、成都、重慶、西安等多次發生無人機入侵機場管制空域影響民航運行安全事件,對旅客生命安全和民航正常運行構成嚴重威脅。此外,小微無人機容易被不法分子利用,針對電站、港口、監獄等要害區域實施恐怖襲擊,對社會和公共安全造成巨大隱患[1-2]。針對日趨嚴重的無人機威脅,低空域無人機防控技術應運而生,低空空域目標防控行業作為一個新興產業獲得了高速發展的機遇[3]。
1 低空空域防控技術研究進展
低空空域防控技術來源于傳統的低空探測,結合無線電、大數據網絡化等,形成對低空空域目標的探測、識別、組網、協同、處置等一系列手段,實現對低空空域的有效感知和態勢分析,達到對低空空域的有效防控。
1.1 技術進展
實現對低空域無人機的探測、識別、組網、協同是低空空域管理的主要任務和難點,一方面,基于傳統的雷達、光電等探測技術,針對無人機目標的特點,結合神經網絡、深度學習等新技術,通過深挖現有技術潛力,提升雷達、光電探測技術能力;另一方面,通過有效集成雷達、光電等多種技術,利用特征認知技術、大數據分析技術,實現對無人機目標的多維協同認知和安全態勢感知。
在傳統技術領域,雷達探測通過獲取無人機目標的回波信息,利用回波信息的幅值,即信噪比,從雜波和背景中檢測出目標。針對無人機目標,特別是小微型無人機目標回波能量弱,信噪比低的情況,普遍采用長時間相參積累的方式提升目標的回波能量。由于目標的運動和雷達的性能,隨著長時間的相參積累,目標的回波能量在距離-多普勒上發生二維擴散,為了解決這個問題,西安電子科技大學的王俊、張守宏提出一種基于距離拉伸和時頻分析的包絡移動補償方法,將不同單元中的目標回波作為暫態信號,通過時頻聯合處理來進行運動補償和匹配相參積累。國防科技大學霍凱等人采用Keystone變換校正距離走動問題。國防科技大學許稼等人通過變換域的方法,利用Radon-Fourier變換,沿目標運動參數給出的目標觀測值軌跡進行積累,從而實現長時間的相參積累。傳統的光電探測領域,為了實現對弱小目標的能力積累檢測,通常采用檢測前跟蹤方法,通過積累連續多幀的光電信息實現弱小目標檢測。

表1 三種無人機探測方式對比
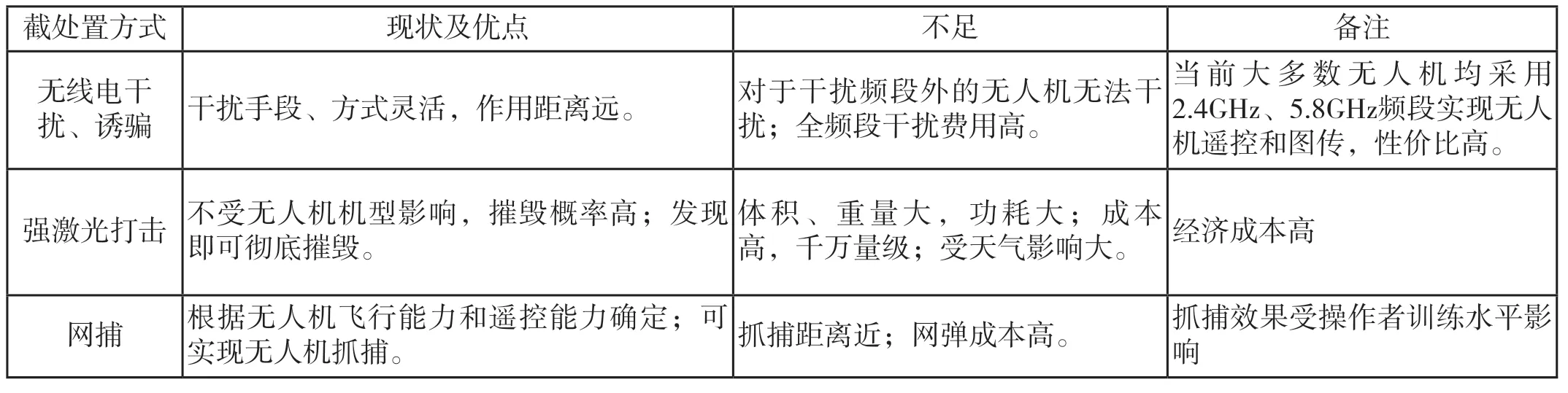
表2 無人機攔截處置手段對比
上述傳統的無人機目標檢測方法,沒有脫離傳統的能量檢測范疇,沒有能夠充分利用雷達、光電獲得的目標多維信息,結合當前大力發展的深度學習,神經網絡技術,雷達發展出利用環境和目標的特征感知來檢測目標,雷達獲取的環境特征一方面取決于雷達參數(雷達頻段、極化方式、分辨率單元、脈沖波型、掃描速度等),另一方面取決于環境參數(城市建筑、風速、云雨等),是一個復雜的非線性過程。隨著雷達性能的提升,能夠對雷達回波信號進行精細化的時-頻分析,獲取目標自身結構的微多普勒信息,提取目標的微動特征。微動特征反映了目標精細結構運動和幾何結構對電磁散射的綜合調制,能夠為目標的特征提取和檢測提供新的途徑。Sparr T等人對給出了不同微動形式(旋轉、振動等)下雷達信號的回波形式,P.Molchanov等利用用短時傅立葉變化分析了無人機和飛鳥的時頻信息特征,杜蘭等人利用經驗模態分解獲得空中飛機目標的時頻特征, 吳琳擁[2]等人通過奇異值處理以及多傳感器手段處理低空目標檢測和防御問題。通過精細化時頻特征提取,利用神經網絡學習等方法,提升了雷達等探測技術的能力。
1.2 系統建設情況
四川九洲防控科技有限公司自主研發的“大盾”低空超低空防御系統,針對大區域低空安全,通過分布式網絡化技術,構建了對低空空域目標探測-指揮-處置的智能化防控系統,該系統在用戶使用過程中反應迅速、操作簡單,能有效防控入侵的低空目標。
2 無人機防控技術對比
2.1 無人機探測手段對比
無人機探測方式主要有雷達探測、無線電偵測、光電探測和聲音探測,其中聲音探測在城市環境或復雜環境下很難有效區分無人機目標,且探測距離僅100~200m,尚不具備工程化應用條件。現將雷達探測、無線電偵測和光電探測等三種方式進行對比,結果見表1。
2.2 目標攔截處置手段對比
現階段無人機攔截處置有多種手段,其中以電磁干擾、強激光打擊、網彈和網捕無人機最為典型,目標攔截處置手段優缺點對比見表2。
3 無人機防控面臨的挑戰
3.1 防控系統分布式協同處理能力和可擴展性需持續優化
對于機場、大型油田等區域型無人機防控需求,需采取構建分布式、網格化的防控體系方式,要求各網格站點通過高效的通信網絡快速將目標信息和控制指令上報指揮終端,并將區域內和附近的人防力量集中調用,提高對無人機的協同處理能力。
緊密跟蹤無人機防控前沿技術成果,系統采取開放式網絡構架,預留未來成熟有效的偵測和處置設備接入能力,使新增設備易于納入一體化指控體系,具備持續優化的能力。
3.2 單一設備對無人機偵測結果的準確性與用戶需求不符
當前,無人機偵測技術手段主要包括雷達探測、無線電偵測和光電探測等三種方式,雷達探測存在一定的虛警;無線電偵測不具備全頻段偵測能力,且城市環境中電磁頻譜復雜,偵測效果一般;光電探測不具備快速大范圍搜索能力,受天氣環境影響較大。單一設備對無人機的偵測結果,無法滿足用戶提出的100%準確性需求。通過優化設備探測能力,采取多種技術手段聯合檢測方式,提高探測結果的準確性。
3.3 無人機處置效率低,末端管控力量薄弱
無人機處置技術包括電磁干擾設備、無人機網捕設備等,在缺乏實時目標導引信息的情況下,以上設備均不具備對無人機的處置能力。因此,無人機防控指揮系統需優化信息傳輸環節,縮短反應時間,提高處置效率。
3.4 缺少核心技術試驗和驗證平臺,成果轉化周期長
無人機防控設備研制和生產單位具備單一設備或技術的測試和驗證能力,但由于缺少系統試驗、測試缺少專用平臺,對無人機精確發現、實時跟蹤、準確定位、快速引導、實時干擾的全系統功能測試和驗證能力不足,導致新技術迭代、轉化周期長,無法滿足市場對高效的無人機防控系統的迫切需求。
3.5 無人機防控行業技術標準缺失,制約產業發展
無人機防控行業技術標準缺失,造成產品品質無法保證,導致市場上產品質量參差不齊、魚龍混雜,很多廠家為搶占市場,把很多不成熟、不穩定的產品進行包裝、宣傳,惡意競爭。技術標準缺失不僅會造成行業混亂,也會給用戶對無人機防控產品的選用產生不信任感,對無人機防控行業應用的持續深入帶來極大困難,嚴重制約產業發展。
4 無人機防控關鍵技術
4.1 基于開放式的分布式網絡化無人機防控系統架構研究
無人機防控系統架構是整個低空空域管理體系中最核心、最重要的模塊。隨著無人機的興起,針對無人機防控的研究開始起步,經過近幾年的發展,針對無人機的探測、指控、處置等手段逐步形成,實現了核心技術的突破并形成了一定的產業規模。但是,針對無人機防控的整體體系構架研究不足,在無人機防控的穩定性、可靠性、降成本等方面缺乏評估手段,極大地制約了無人機防控的發展和產業規模。
無人機防控系統架構研究,進行無人機防控優化布局,系統總體架構設計,分布式組網優化,集探測、識別、指控、處置一體的高效系統架構設計,系統整體性能、可擴展性、環境適應性、費效比的研究,整合無人機防控產業上下游資源,提升無人機防控系統層級。
4.2 基于多模式探測的多源數據融合和目標分類識別技術研究
當前無人機防控面臨的威脅更加復雜、防控能力仍有欠缺,集中體現在探測無人機目標時,未能有效區別低空民航機、地面運動汽車等其它目標,導致無人機防控效率較低。多源數據融合和目標分類識別是提升無人機防控系統關鍵性能的有效手段,由各種傳感器設備和數據資源形成的大數據分析、目標特征提取和融合、目標分類識別構成了無人機防控的核心能力,通過建立目標特征數據庫,整合無人機防控系統資源,獲取低空空域有效態勢,保障空域安全的重要途徑。
4.3 全頻段無線電偵測及瞄準式干擾技術研究
一方面,無人機在復雜的電磁環境(城市、機場等)中使用,另一方面,無線電是控制(控制信號、圖傳信號等)無人機的有效手段。無人機防控系統必須全面掌握使用環境的無線電態勢,管控合法的無線電用戶,使其工作在制定的頻段上,同時要偵測、定位、查處、干擾非法的、未知的無線電信號,特別是無人機飛行時的控制信號和圖傳信號等。以全頻段無線電偵測及瞄準式干擾技術為中心,結合信息化、網絡化、智能化、集成化等需求,實現區域范圍內雷達引導下的無線電全頻段偵測、信息共享、瞄準式干擾處置,提升無線電管控水平。
4.4 關鍵技術驗證、系統集成試驗平臺及試點試驗工程
關鍵技術驗證、系統集成試驗平臺是對無人機防控的關鍵技術進行驗證和系統集成試驗驗證的平臺,是實現科研技術成果化的必要條件,通過關鍵技術驗證,系統集成試驗,驗證系統總體架構、設備功能、關鍵技術,為無人機防控提供技術支撐。
5 低空域目標防控研究展望
隨著低空空域改革的推進,低空空域開放的需求推動民用直升機、消費級無人機等各類航空器飛行需求的快速增長,航空主體多元化、活動多樣化的趨勢更加凸顯,需要有效監視空域,獲取航空情報等各類信息,為低空空域管理提供合理、透明、共享的空域態勢信息,從而為低空及超低空航空器實施智能化管理提供完整一致的信息支撐。因此,未來低空域無人機探測與防范系統將向著網絡化、智能化、一體化方向發展。
5.1 全天候全天時低空空域信息獲取促進目標防控系統網絡化發展
雷達系統是低空空域管理的最重要的基礎設施,通過分布式雷達協同探測實現大面積低空空域的全天候全天時監測,為低空管理者提供實時的空域態勢信息。基于分布式雷達組網協同探測是獲取空域信息的最有效途徑,是現代防空技術發展的必然。面向城市、要害部位的區域航空管理系統通過構建低空域無人機探測與防范系統網絡,可實現凈空區域內各類航空器的無縫探測覆蓋,保證對空域信息的實時性,使一個管理中心同時監控方圓數百千米內上千架飛機成為可能。隨著以消費級無人跡為主的航空器的不斷發展,建立面向低空及超低空空域的無縫監測網絡、實現空域無縫覆蓋和有效管理,成為未來發展的主要方向。
5.2 高度信息共享與決策促進目標防控系統智能化發展
隨著空中飛行流量的不斷上升,監測管理人員的任務越來越重,對空域監測管理的自動化、智能化程度要求也越來越高。新一代低空及超低空監測系統需要高度的信息共享及決策,達到更高的自動化、智能化程度,減輕管理的信息負荷,提高管理效率。低空域目標防控要具有高效的探測能力、系統間信息互用共享、目標信息分類識別、威脅度自動判斷、信息綜合決策等能力,才能實現低空空域監管的智能化發展。
5.3 全空域無縫連接促進空中防控一體化發展
低空及超低空空域涉及國家安全、政治、經濟和外交等敏感重大問題,航空器除了作為最優先的交通、運輸工具,其功能和性能也在不斷地延伸。隨著低空及超低空航空器的發展,需要高度兼容的空中監視管理系統。因此,低空域目標防控與各類現有空管系統的高度一體化已成為技術發展的主要方向。
6 結語
低空域無人機防控技術一方面針對無人機技術的發展而發展,不停的優化對無人機的探測、跟蹤、識別、處置等手段,從單一的設備向系統集成方向發展,綜合多種體制設備形成無人機探測系統,大力提升無人機防控性能。另一方面吸收引進不同領域的技術,隨著無人機防控技術與深度學習、人工智能、移動互聯網、大數據等新興領域的創新融合和不斷深化,推進一系列理論和方法的研究,積極探索無人機防控的新體制,使得無人機防控技術不斷迭代進步。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-04-25)2022-04-25 17:20:21
今日農業(2021年15期)2021-10-14 08:20:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
人大建設(2020年3期)2020-07-27 02:48:40
今日農業(2019年14期)2019-09-18 01:21:44
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46