基于潮流跟蹤的受端電網穩控切負荷方法
2020-07-23 08:23:32楊揚陳義宣何燁王昆新
云南電力技術 2020年3期
楊揚,陳義宣,何燁,王昆新
(1.中國能源建設集團云南省電力設計院有限公司,昆明 650051;2.云南電網有限責任公司,昆明 650011)
0 前言
受端電網系統是指以負荷集中區域為中心,通過接受外部及遠方電源輸入的有功電力和電能,以實現供需平衡[1]。當受端電網與系統連接的主要斷面N-2故障后,可能引起受端大量功率缺額或者剩余斷面過載,穩控切負荷裝置動作切除部分負荷,可以消除功率缺額和過載,是維持受端電網安全穩定運行的重要措施。
傳統穩控切負荷方法中,根據預計的運行方式和潮流狀態,設定各種可能的偶發故障,離線計算分析后得出相應的各種控制策略,實際運行時查找控制策略表將可切負荷逐個累加以匹配需切負荷總量,同時可切負荷排序也有所不同,大致可以分成幾種:按元件功率或優先級排序、按元件最優組合排序、按負荷輪次與廠站優先級排序、按優先級與最優組合排序等[2-7]。這些方法由典型工況和故障來索引,離線計算依賴于運行人員的經驗,執行時大多讓所有負荷均參與切除,適應性差且存在過切的可能。
本文利用潮流跟蹤算法分析了受端電網斷面故障對下游節點的影響程度,通過定義的切負荷系數將需切負荷量分配到各個下游節點,形成了統一的切負荷分配和排序方法,仿真表明該方法更有利于故障后的受端電網恢復穩定。
1 潮流跟蹤算法
潮流跟蹤算法最初由英國的Janusz Bialek[8]和Daniel Kirschen[9]提出,該算法服從按比例分配原則[10],用于分析電網拓撲中電源、負荷與潮流的關系,可以求解出任一支路或元件上的潮流分別是由哪些電源、負荷提供,各自貢獻有多大。近年來,潮流跟蹤算法在電網安全穩定和運行經濟分析中得到廣泛引用[11-12]。結合受端電網的定義,系統位于受端電網上游并為其提供功率輸入,在任意時刻這些饋入功率一方面為下游負荷供電,另一方面承擔受端電網的網損。
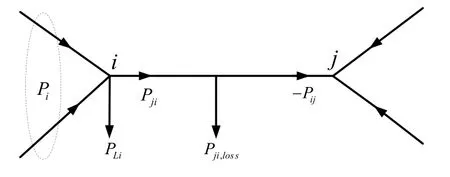
圖1 節點功率流向示意圖
對于有n個節點饋入功率的受端電網,觀察節點i,根據流過功率等于總流出功率的條件,節點i流過功率:

其中:i=1,2,3,….,n,Di是節點i的下游節點集合,PLi是節點i的負荷功率;設是節點i緊鄰的下游支路線損合并值,上式寫成矩陣形式為:

其中:P=[P1P2...Pn]T是節點流過功率列向量;PL=[PL1PL2...PLn]T是節點負荷功率列向量;Pd,loss=[Pd1,loss Pd2,loss...Pdn,loss]T是節點下游網損列向量;Ad∈Rn×n是節點下游分布矩陣,其元素可按下式計算:

支路j-i上的功率為節點j流向節點i,設|Pij|為該支路流入節點i的功率,求解式(2)可以算出|Pij|對下游節點k的負荷貢獻份額,用Pij,Lk表示;以及所承擔的下游網損Pij,loss,如下:
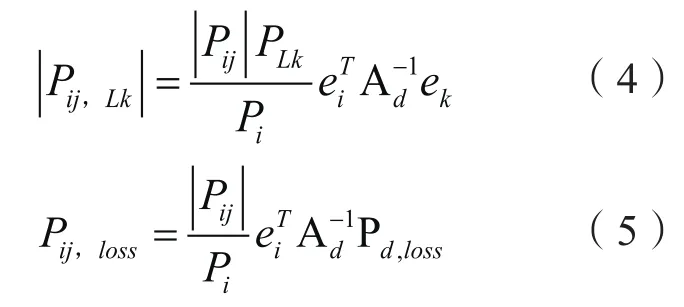
式中,ei,ek∈Rn,是第i個和第k個元素為1,其余元素為0的單位列向量。
上述推導并未對系統的運行方式和運行時刻做任何假定,潮流跟蹤算法不僅適用于穩態潮流,也適用于動態過程的任意時刻,即任意節點的流入功率總是等于流出功率,即式(1)總是成立的。
正如施秉銀所說,不只是西安交大一附院,推行目標管理的醫院普遍面臨一些問題。如由于醫院工作的特殊性和復雜性,不同科室工作性質不同,工作難易程度和工作量大小不同,目標及考核標準難以確定;指標設計缺乏公平性和合理性,選擇的指標主次不分明、重點不突出,對定性指標和定量指標設置也不夠科學;過程管理缺乏科學性和規范性,中期及結果的考核管理辦法仍須探究。
2 受端電網穩控切負荷方法
假設受端電網與系統連接的節點i相關的支路j因故障而切除,則對于支路j-i下游的所有負荷節點k都將發生功率的變化,即定義在故障后的一段時間內使下式成立的節點集合為Ci:

這表明支路j-i故障,將對受端電網Ci節點集合中的負荷減少供電。針對于系統N-2安穩裝置動作的需要,下面分兩種情況討論:
由此,定義針對支路j-i故障退出后負荷節點k的切負荷系數λij,Lk
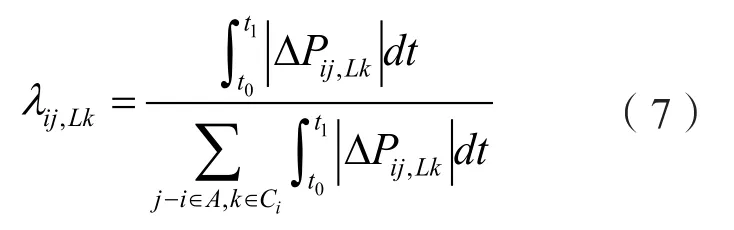
式中,A為j-i中任意兩個支路故障的集合。根據故障的發展過程,積分下限t0可選為故障前的最近一個采樣時刻;穩控切負荷裝置通常在監測到受端頻率減低或某元件過載時啟動計時,在經過一定的延時后出口切除負荷,因此積分上限t1可選為穩控切負荷裝置啟動前的最近一個采樣時刻。
上式表明,在[t0~ t1]時間區間內,變化量做功更大的負荷將有更大的切負荷系數,該負荷的變化量做功更大,說明故障支路更多的減少了對其供電,這部分減少的供電功率將由其他支路進行補償;換句話說,其他有可能過載的支路將會更多的支援變化量做功更大的負荷。因此,穩控動作時更多的切除該負荷將有利于受端的穩定。
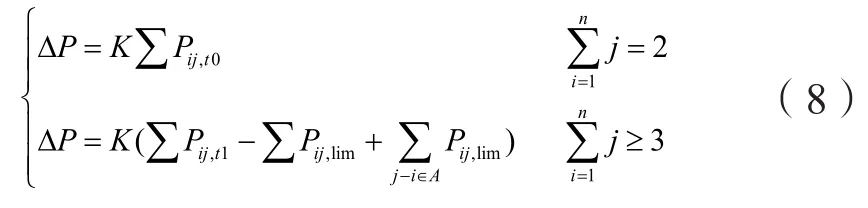
式中,K為切除裕度,一般K≈1,當K<1時為欠切,K>1時為過切,具體取值可根據斷面控制目標和下游負荷情況選擇。
節點k所需切除的負荷量為

按上式即可求出支路j-i故障后受端電網孤網或剩余斷面元件過載時應切除的下游各節點負荷量,構造的切負荷系數能準確反映功率缺額情況下各負荷節點受到的影響,切除受影響較大的負荷對于受端電網的快速恢復效果較好。
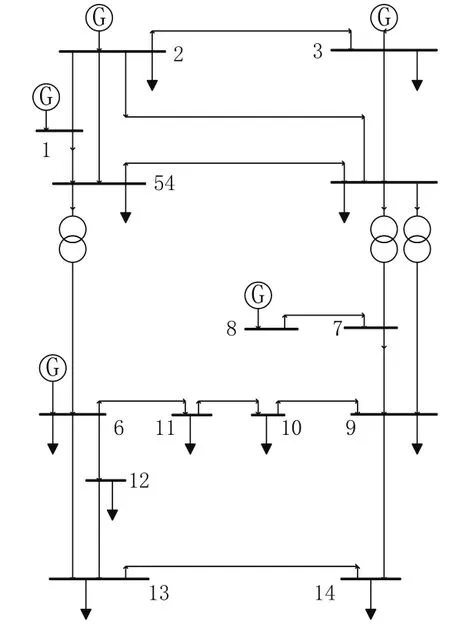
圖2 IEEE 14節點系統電路
3 仿真驗證
仿真采用了IEEE 5機14節點系統[12],接線圖如圖2所示。每臺發電機組均包含勵磁調節系統,并采用次暫態過程變化模型;負荷采用50%感應電動機+50%恒阻抗的綜合負荷模型,計及頻率對負荷的調節效應變化;系統基準容量為100 MVA,額定頻率50 Hz。仿真中考察斷面構成為支路5-6、支路4-7、支路4-9,斷面以下為受端電網,同時認為所有負荷均可按計算量進行切除;支路參數采用原系統數據,并對發電機出力和節點負荷進行了局部調整,調整后初始參數如表1-表3所示。
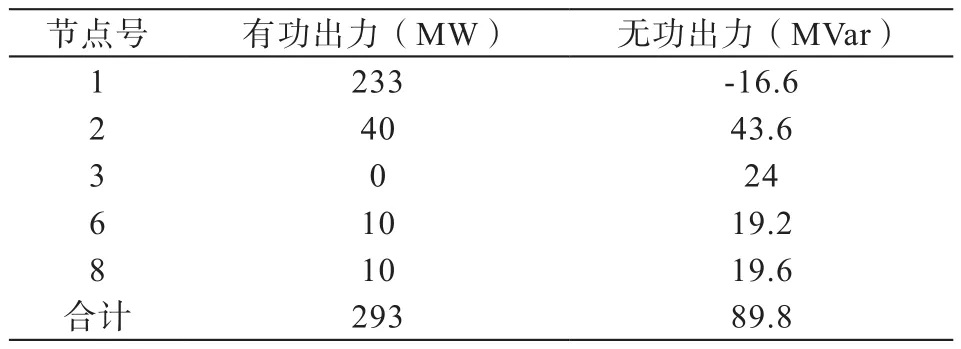
表1 發電機組初始出力
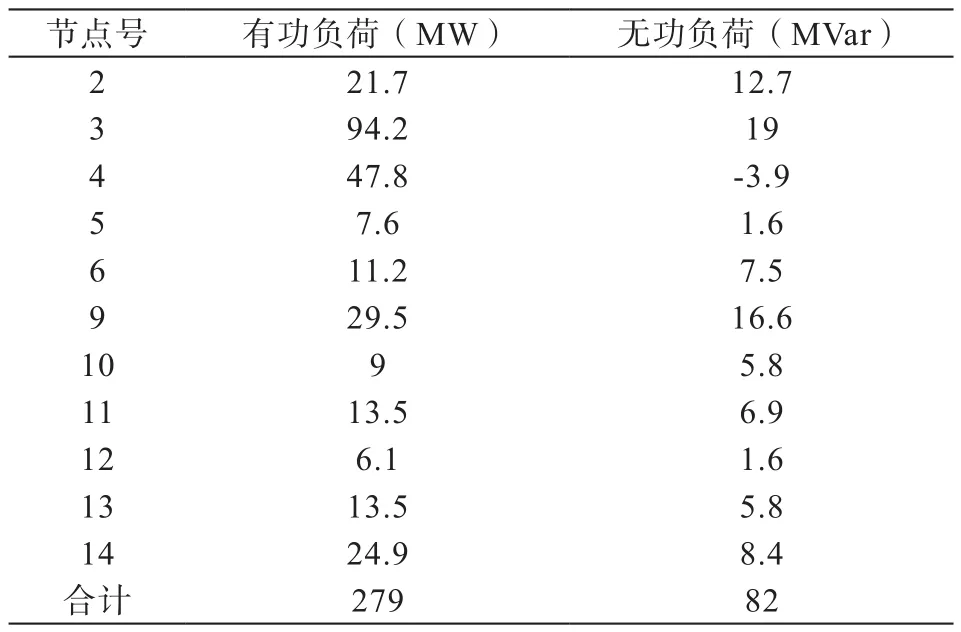
表2 負荷初始大小
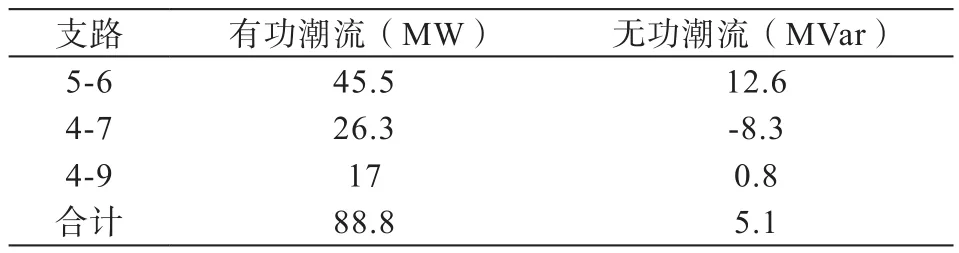
表3 考察斷面初始潮流
3.1 斷面正常N-2的情況
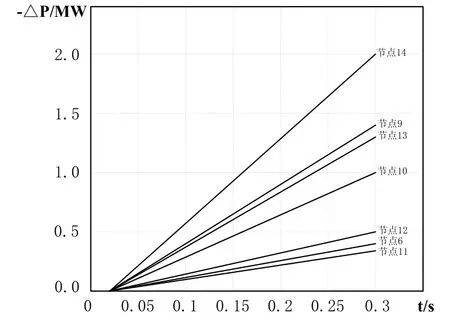
圖3 斷面正常N-2后負荷節點變化量做功
在0.02 s時支路4-7和支路4-9因故障切除,受端電網僅通過支路5-6與系統相連,該支路有功潮流為92.4 MW。假設支路5-6的主變容量為50 MVA,則N-2后主變過載,需要切除部分負荷,此時斷面N-2后所引起的負荷變化量所做的功如圖3所示。圖3中積分起點為故障時刻0.02 s,積分終止時刻為穩控動作時刻,一般為0.3 s,各負荷節點-ΔP直線下的面積分別對應這部分時間內減少供電所做的功:
本算例中,斷面N-2后對下游所有負荷節點都減少了供電,即C4={6,9,10,11,12,13,14},根據式(7)、式(8)和式(9)可分別計算出各節點應切除的負荷,如下:
表4 斷面正常N-2各節點負荷切除量計算結果
本文選取了應用最廣泛、最典型的按負荷輪次與廠站優先級為原則的方法[5-6]進行仿真對比,共切除負荷52 MW。本文方法(實線)和傳統方法(虛線)切除部分負荷后的系統慣量中心頻率變化如圖4所示。
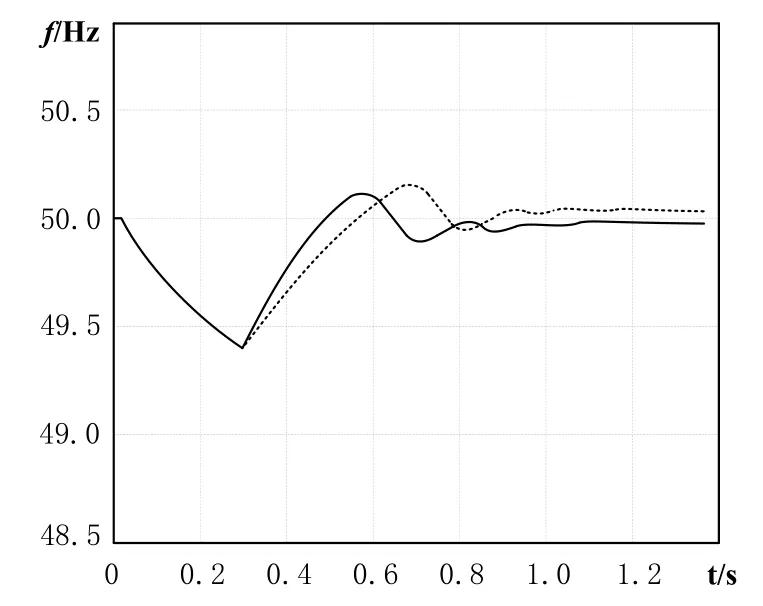
圖4 斷面正常N-2切負荷后系統頻率變化
3.2 斷面檢修N-2的情況
支路5-6檢修,同時在0.02 s時支路4-7和支路4-9因故障切除,受端電網形成孤網,故障前斷面有功潮流為90.8 MW,故障后需要切除部分負荷,此時所引起的負荷變化量所做的功如圖5所示。圖5中積分起點為故障時刻0.02 s,積分終止時刻為穩控動作時刻,一般為0.3 s,各負荷節點-ΔP直線下的面積分別對應這部分時間內減少供電所做的功:
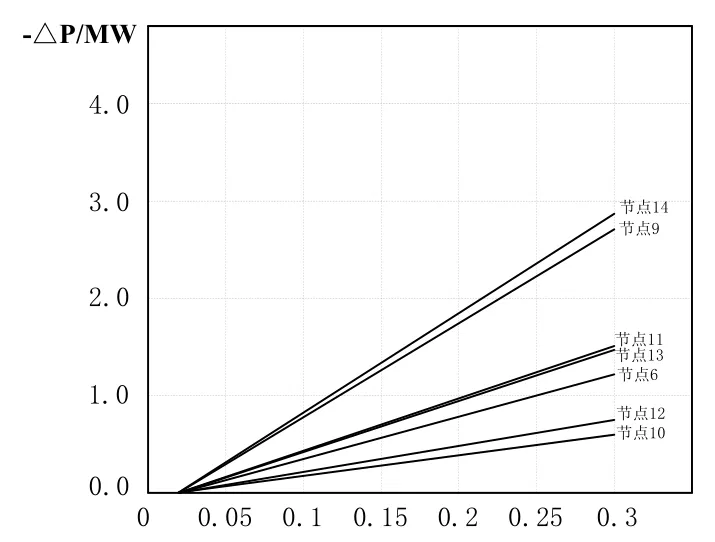
圖5 斷面檢修N-2后負荷節點變化量做功
受端孤網后所有負荷節點都減少了供電,即C檢修4={6,9,10,11,12,13,14},根據式(7)、式(8)和式(9)可分別計算出各節點應切除的負荷,如下:
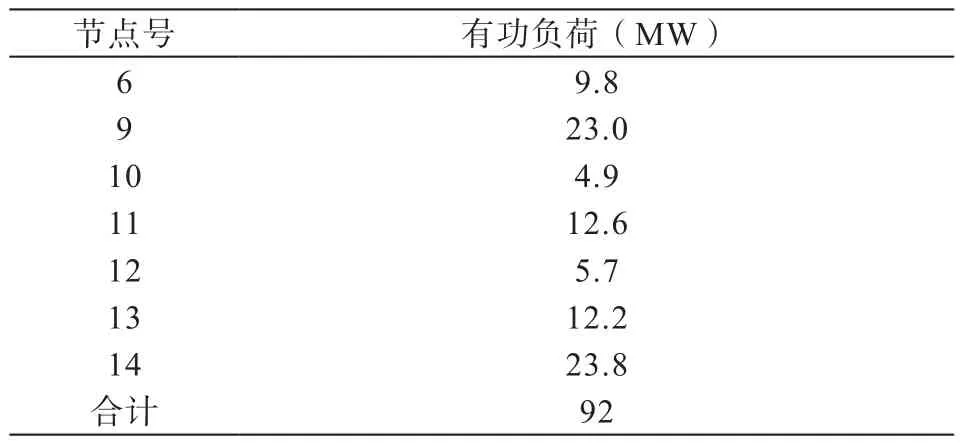
表5 斷面檢修N-2各節點負荷切除量計算結果
同樣的,選取傳統穩控切負荷方法進行仿真對比,共切除負荷95 MW。本文方法(實線)和傳統方法(虛線)切除部分負荷后的系統慣量中心頻率變化如圖6所示。
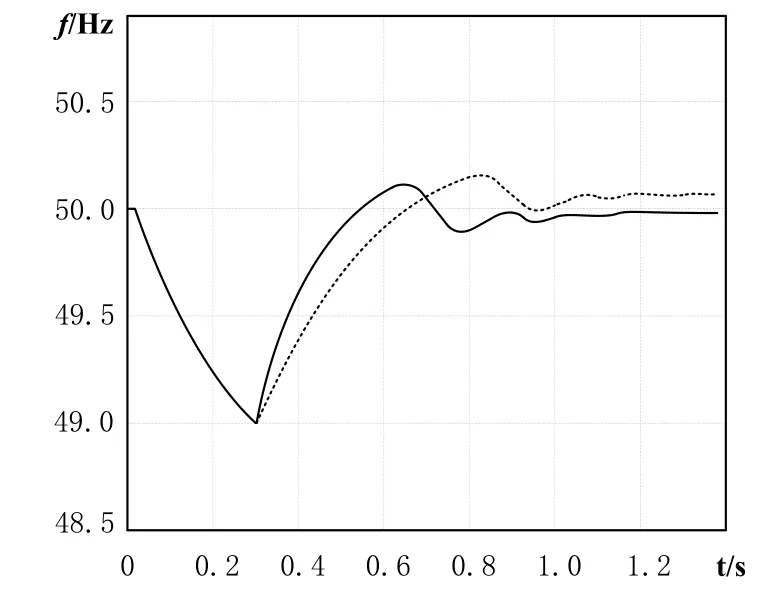
圖6 斷面檢修N-2切負荷后系統頻率變化
由以上算例可知,本文提出的穩控切負荷方法較傳統穩控切負荷方法有更快的頻率恢復特性,這是由于本文方法體現了故障對不同節點負荷的影響程度,更有針對性,而傳統穩控切負荷方法并不能體現這一特性,適應性較差且存在大量過切的可能。
4 結束語
綜上所述,本文提出的受端電網穩控切負荷方法理論基礎為潮流跟蹤,通過定義各節點的切負荷系數,將功率缺額按一定規律分配到各個下游節點,有利于系統擾動后的頻率穩定恢復,適應性較好。實際中,可將此方法應用于穩控系統在線決策,利用廣域測量系統WAMS實時采集線路和負荷節點的功率并上傳,由程序進行潮流跟蹤計算,將結果下發至執行站動作,要求計算程序足夠高效,傳輸通道穩定快速。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
兒童故事畫報(2019年5期)2019-05-26 14:26:14
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
