變剛度電液力系統主導極點模型自適應控制研究*
2020-07-23 01:36:12李朝朝金曉宏張紹峰
機電工程 2020年7期
李朝朝,金曉宏,*,王 坤,張紹峰
(1.武漢科技大學 冶金裝備及其控制教育部重點實驗室,湖北 武漢 430081;2.武漢科技大學 機械傳動與制造工程湖北省重點實驗室,湖北 武漢 430081)
0 引 言
位置擾動型被動式電液力系統(以下簡稱“電液力系統”)是一種根據被加載對象位移要求準確地施加期望力,同時該位移又對自身加載產生擾動的電液力系統,具有控制精度高、響應速度快、承載能力強等優點[1]。電液力系統是一個復雜的非線性系統,當負載剛度變化較大時,系統的控制品質和穩定性會受到明顯影響[2]。如何在變負載剛度情況下提升電液力系統的加載特性顯得尤為重要。
模型參考自適應控制(model reference adaptive control,MRAC)是一種通過設計理想參考模型,利用自適應機構,使實際系統快速、準確、穩定地向理想參考模型收斂的控制算法,能夠有效抑制系統非線性、參數時變帶來的不確定性影響[3]。由于該算法不需要在線辨識,較常規控制算法還提高了系統的響應速度,被廣泛應用于控制系統中。如ZHAO Yi-fei等[4]采用MRAC實現了對電液伺服系統的高精度位置控制;蘇士杰等[5]在電液伺服試驗機主動加載條件下通過MRAC提高了力系統的控制品質。
本文采用MRAC方法,以電液力系統為研究對象,首先探討負載剛度變化對系統的影響,并根據系統理想模型設計出一種基于主導極點,且滿足嚴格正實、穩定最小相位系統要求的三階等效參考模型,通過模型自適應控制器使電液力系統穩定地跟蹤理想參考模型,以期抑制負載剛度變化對系統的影響,從而提高系統響應特性和控制精度。
1 系統組成及工作原理
電液力系統原理圖如圖1所示。
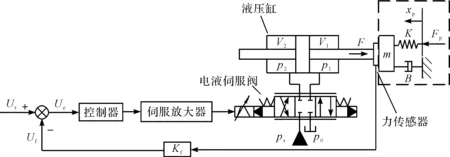
圖1 電液力系統原理圖
圖1中,將被加載對象簡化為一個彈簧阻尼系統(虛線框所示)。系統根據與被加載對象位移相關的力發生函數發送指令信號Ur到控制器,通過電液伺服閥在液壓缸兩腔產生壓力差PL(PL=P1-P2),活塞桿在PL作用下,輸出力F=PLA(A—活塞桿有效面積)作用于被加載對象并由力傳感器檢測,力傳感器將測得的力信號反饋給輸入端,實現閉環控制。
2 數學模型
根據文獻[6]電液力系統中各環節數學方程,以力F為輸出,以電液伺服閥閥芯位移Xv和被加載對象位移XP為輸入,可得輸出力F的拉氏域表達式如下:
(1)
式中:M=mVt/(4Ee);N=BVt/(4Ee)+mKc;Z=BKce+KVt/(4Ee)+A2;J=KKce;Vt—液壓缸總空腔容積,m3;Ee—油液彈性模量,Pa;Kce—總流量-壓力系數,(m3/s)/Pa;m—負載等效質量,kg;Kq—閥口流量增益,(m3/s)/Pa;B—運動部件黏性阻尼系數,N/(m·s-1);K—電液力系統負載剛度,由負載彈性剛度、活塞桿剛度和力傳感器連接剛度3部分組成,N/m。
(2)
式中:ω0—負載固有頻率,ω0=(K/m)1/2;ζ0—負載阻尼比,ζ0=B/[2(Km)1/2];ω1—負載剛度與液壓彈簧并聯偶合的剛度與負載質量形成的綜合固有頻率,ω1=ω0(1+Kh/K)1/2;ζ1—阻尼比,ζ1=2EeKce/[ω0Vt(1+K/Kh)];ω2—負載剛度與液壓彈簧串聯偶合的剛度與阻尼系數之比,ω2=(KceKKh)/[A2(K+Kh)]。
由式(2)可知,電液力系統的3個轉折頻率ω0、ω1和ω2均與參數K、Kh和m有關,當負載質量m和液壓彈簧剛度Kh一定時,電液力系統的系統特性主要取決于負載剛度K。
下面筆者以一具體電液力系統,進行系統特性分析,研究不同負載剛度對系統性能的影響。
電液力系統參數如表1[8]所示。
表1 電液力系統參數表
電液力系統所模擬的彈性負載剛度為變剛度,用來模擬大型閥門開度控制中負載剛度的變化。
筆者對系統輸入幅值為2 kN的階躍指令信號,分別取K為1 MN/m、5 MN/m、13 MN/m、25 MN/m、35 MN/m、50 MN/m進行仿真實驗,得到不同負載剛度下電液力系統階躍響應曲線如圖2所示。
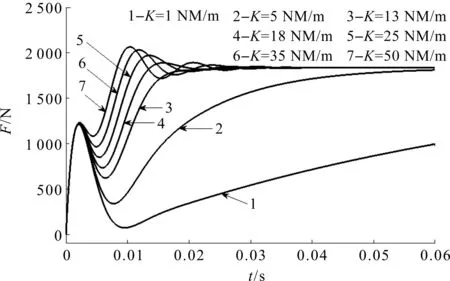
圖2 不同負載剛度下電液力系統階躍響應曲線
圖2中,曲線均在2 ms內從0 N迅速上升至1 224 N,然后開始下降,負載剛度越小,下降幅度越大,持續時間越長,當K=1 MN/m時,曲線于9.5 ms才下降到其最低點(9.5,72.9)。曲線經歷下降段后開始二次上升,當K=1 MN/m~13 MN/m時,K越大,系統上升速度越快,調整時間越短;當K=13 MN/m~50 MN/m時,系統在保持原有上升規律基礎上出現超調現象,K越大,其最大超調量越大,系統調整時間越短。最終不同剛度下的系統輸出力達到相同穩態值1 836 N,穩態精度為91.8%。
3 基于主導極點的MRAC策略
針對電液力系統中負載剛度變化會導致系統不穩定、控制精度差等問題,本研究提出采用MRAC策略。通過將參考模型的理想輸出ym與電液力系統的實際輸出yp作差,得到實時廣義輸出誤差e(t),自適應機構通過實時調整控制器參數使e(t)趨向于0,使得電液力系統輸出向參考模型輸出靠近并最終達到一致[9]。
3.1 基于主導極點的參考模型設計
參考模型的選取直接決定了電液力系統的控制效果。主導極點作為一種將高階系統簡化為低階系統來做定量估算的方法,系統特性主要由主導極點決定。
由式(2)知電液力系統是由一階慣性環節、二階振蕩環節和二階微分環節組成的三階系統,故筆者采用以主導極點標準化傳遞函數為基礎,構造出分子分母階數與實際系統傳遞函數結構形式一致、可以獨立進行調整的三階參考模型,其形式為:
(3)
筆者將二階振蕩環節的一對共軛復數極點作為主導極點,通過恰當地配置其他極點使其對整個系統的影響忽略不計,即三階參考模型的特性主要由二階振蕩環節的固有頻率ωn和阻尼比ζ決定。
根據系統性能指標,筆者選取電液力系統的液壓固有頻率作為參考模型固有頻率,從表1參數計算得系統液壓固有頻率為529.15 rad/s,取ωn=530 rad/s。由系統最大超調量Mp≤10%確定二階振蕩環節最佳阻尼比ζ=0.707。故二階振蕩環節的一對共軛復數極點為:
(4)
在控制理論中,其他極點實部的值是主導極點實部值的5倍以上[10]。基于該條件確定參考模型中一階慣性環節1/(Ts+1)的極點為:
s3=-10ζωn=-3 747.1
(5)
將式(4,5)代入式(3),得到參考模型傳遞函數基本形式如下:
(6)
式中:b0=1.053×109;b1=3.089×106;b2=4 496.52。
在MRAC控制器中,參考模型Gm(s)需滿足嚴格正實、穩定最小相位系統條件,此時式(6)需滿足下列不等式:
(7)
根據式(6,7),選取a=2 000,Km=263.25,得到基于主導極點的參考模型傳遞函數為:
(8)
本研究對參考模型進行仿真計算,得到參考模型單位階躍響應中的上升時間為3.76 ms,最大超調量為4.69%,響應達到穩態值±2%時所對應的調整時間為10.5 ms。
由伯德圖可知,-10°相移頻率為88.89 rad/s,根據雙十標準[11-13]計算得參考模型頻寬為14.1 Hz,故所選取的參考模型頻寬較寬、動態響應性好,滿足系統性能要求。
3.2 模型參考自適應控制器設計
本研究根據Narendra穩定自適應控制器方案[14]設計自適應控制器,由式(2)可知電液力系統傳遞函數的分母、分子分別為3階和2階,配置可調增益Kc和兩個反饋信號補償器F1和F2共同組成自適應控制器。
模型參考自適應控制框圖如圖3所示。
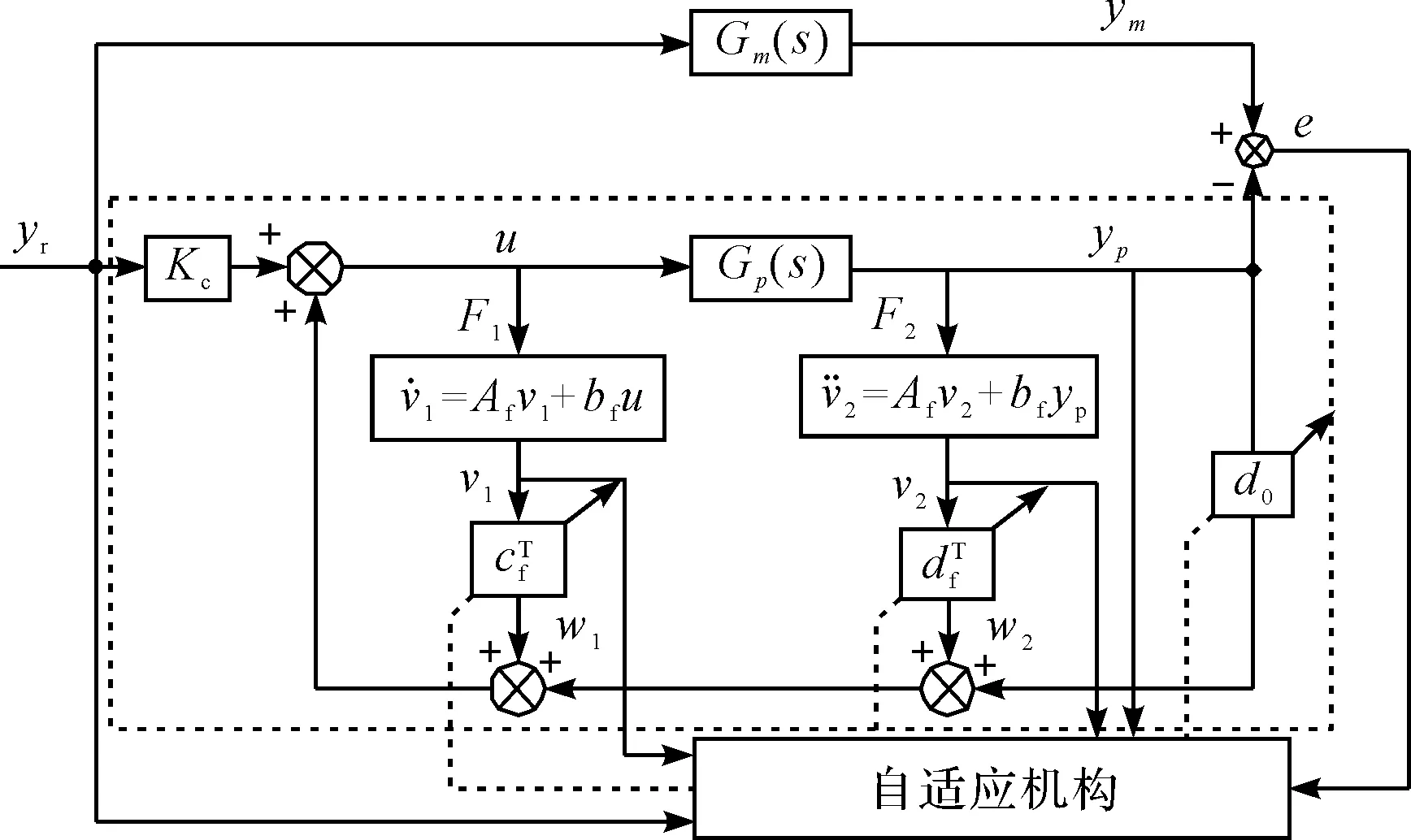
圖3 模型參考自適應控制框圖
電液力系統的狀態方程及傳遞函數為:
(9)
式中:xp—3維狀態向量;u—控制量;yp—電液力系統輸出量;Ap—3×3維狀態矩陣;bp,h—3×1維向量;Kp—電液力系統增益,Kp>0;Np(s),Dp(s)—2階和3階首一多項式,且Np(s)為Hurwitz多項式。
主導極點模型的狀態方程及傳遞函數為:
(10)
式中:xm—3維狀態向量;yr—模型輸入;ym—模型輸出;Am—3×3維矩陣;bm—3×1維向量;km—模型系統增益;Nm(s),Dm(s)—2階和3階首一多項式。
兩個反饋信號補償器的狀態方程及傳遞函數分別為:
(11)
(12)
式中:v1,v2—2維列向量;Df(s)—2階首一Hurwitz多項式;Nc(s),Nd(s)—1階多項式。
即:
(13)
式中:Af—待選2×2漸近穩定矩陣;cf,df—2維列向量。
即:
(14)
選擇Df(s)=Nm(s),并構造兩反饋信號補償器狀態方程:
(15)
電液力系統GP(s)、可調增益Kc、兩個反饋信號補償器F1和F2共同組成了自適應力系統,自適應控制律u為:
(16)
式中:θT(t)—可調參數向量,θT(t)=[Kc(t)cfT(t)d0
(t)dfT(t)];φ(t)—信號向量,φ(t)=[yr(t)v1T(t)yP
(t)v2T(t)]。
可調參數自適應律為:

(17)
根據Lyapunov穩定性理論,式(17)表示的自適應控制律能保證系統全局漸進穩定。
4 仿真分析
為驗證基于主導極點模型自適應控制算法的有效性,本研究在Matlab/Simulink中建立電液力系統數學模型,使用表1參數進行仿真,采用ode23算法,設置最大步長為1×10-5s、計算相對誤差為10-6。
4.1 不同自適應系數,自適應力系統跟蹤參考模型效果
負載剛度K=50 MN/m,本研究對自適應力系統輸入幅值為3 kN的階躍指令信號。參照文獻[15]的方法,自適應系數R分別取為100、5 000、50 000、100 000,得到不同R時自適應力系統階躍響應跟蹤誤差指標評價表,如表2所示。
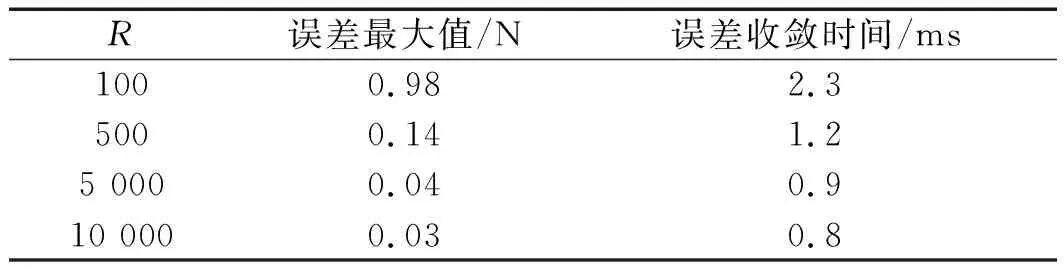
表2 不同R時自適應力系統階躍響應跟蹤誤差指標評價表
由表2可知,自適應力系統能夠快速跟蹤參考模型并保持穩定,隨著R的增大,系統跟蹤誤差最大值減小,誤差收斂時間變短。
當R=100 000時,系統跟蹤誤差最大值僅為0.03 N,誤差收斂時間為0.8 ms,與R=50 000相比其跟蹤精度提升幅度已很低,故當R>100 000時自適應力系統跟蹤效果不會發生大幅度提升,后面仿真中均取R=100 000。
4.2 不同負載剛度,自適應力系統指令跟蹤效果
本文對電液力系統輸入幅值為2 kN的階躍指令信號,取負載剛度K分別為1 MN/m、13 MN/m、50 MN/m,得到不同負載剛度下自適應力系統階躍響應曲線如圖4所示。
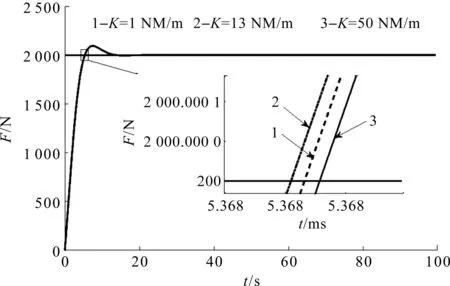
圖4 不同負載剛度下自適應力系統階躍響應曲線
筆者定義曲線的最終值作為系統響應性能指標中的穩態輸出值,得到不同負載剛度下系統階躍響應動態性能對比結果,如表3所示。
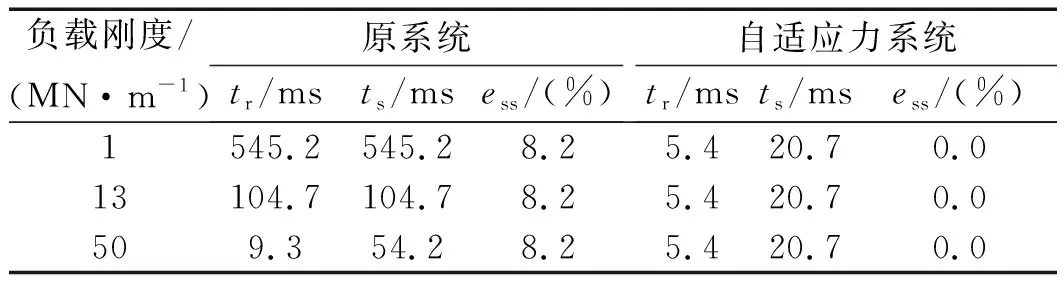
表3 不同負載剛度下系統階躍響應動態性能對比
由表3可知:
原系統在3種負載剛度條件下的穩態誤差均大于8%,控制精度較差;而自適應力系統不同負載剛度下均能在20.7 ms內快速跟蹤指令信號且具有極佳的一致性。
上述結果表明,基于主導極點模型自適應控制器能夠抑制負載剛度變化對電液力系統的影響,消除系統在響應過程中出現的波動現象,從而有效提高系統的控制精度和響應速度。
4.3 不同頻率正弦指令,加入自適應控制器前后對比
K=50 MN/m時,對原系統與自適應力系統分別輸入3種不同頻率的正弦指令信號:F01=3+2.5sin10πt(kN)、F02=3+2.5sin20πt(kN)和F03=3+2.5sin28πt(kN),得到不同頻率正弦指令下系統性能對比如表4所示。
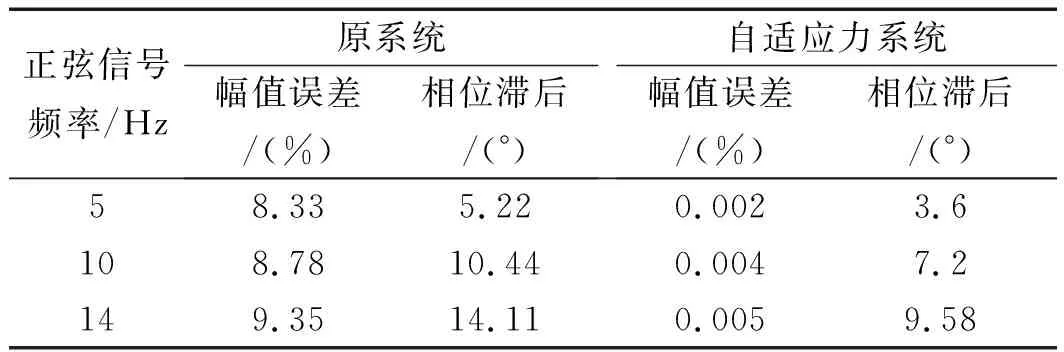
表4 不同頻率正弦指令下系統性能對比
其中,原系統和自適應力系統14 Hz時正弦響應曲線如圖5所示。
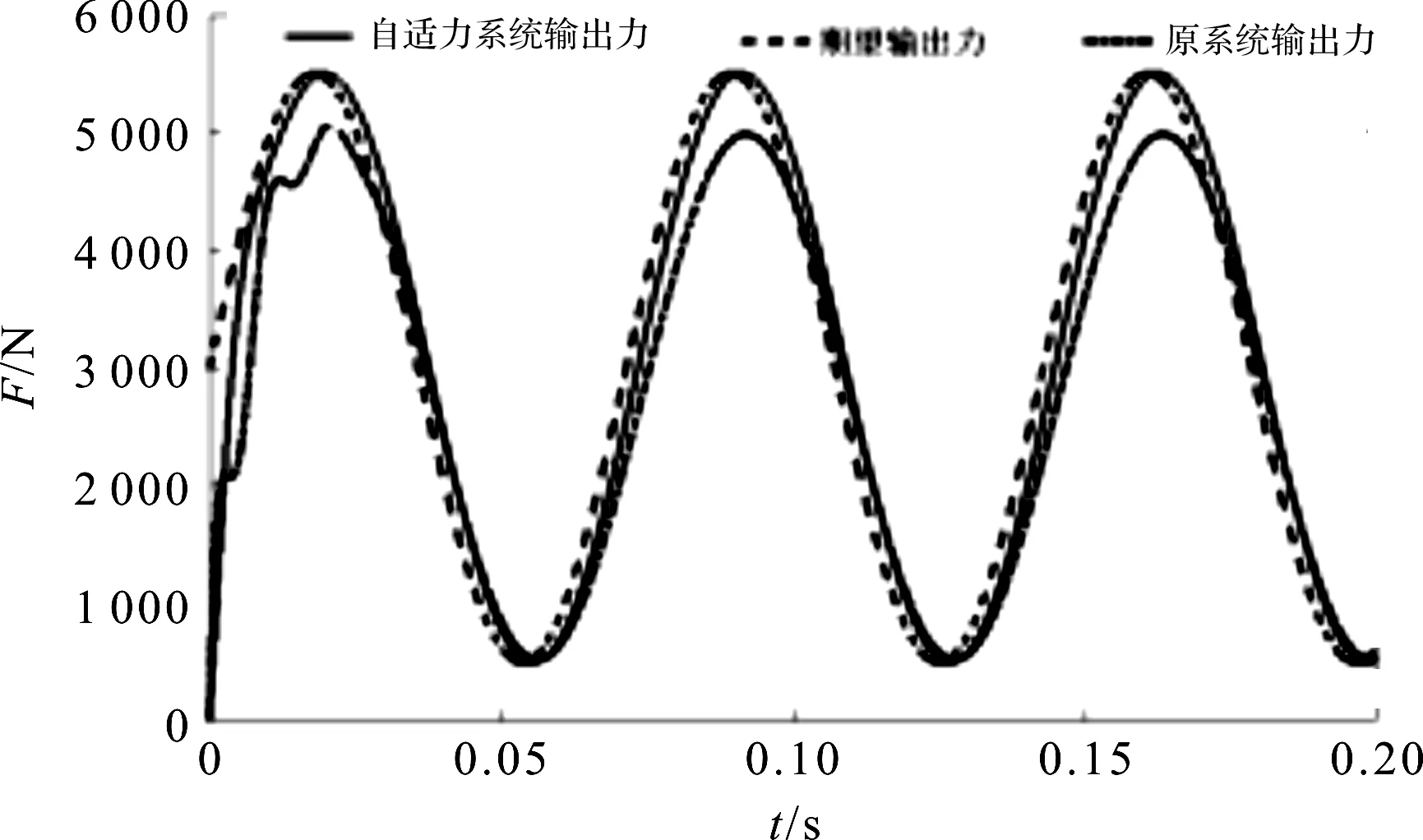
圖5 原系統和自適應力系統14 Hz時正弦響應曲線
由圖5可知:
原系統的輸入頻率從5 Hz上升至14 Hz時,其幅值誤差已由8.33%增長至9.35%;而自適應力系統在14 Hz時幅值誤差僅為0.005%,相位滯后9.58°。
上述結果表明,自適應力系統在14 Hz情況下依然能很好的跟蹤指令信號,并保持較高的控制精度。
4.4 位置擾動下,加入自適應控制器前后對比
輸入幅值為2 kN的階躍指令信號,負載剛度K分別取為35 MN/m、50 MN/m,在0.1 s時對原系統和自適應力系統分別加入0.005 m的階躍位置擾動xp,得到0.1 s時階躍位置擾動下系統響應曲線如圖6所示。
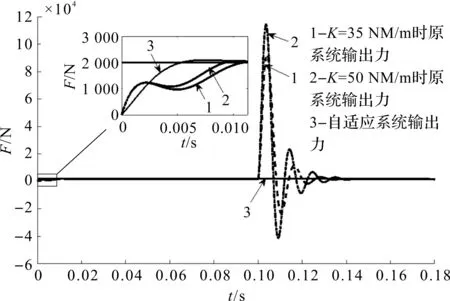
圖6 0.1 s時階躍位置擾動下系統響應曲線
由圖6可知:
加入位置擾動后,原系統在K取35 MN/m和50 MN/m時對應的最大誤差分別為92.8 kN和114.4 kN,并均于0.168 s再次達到穩態值1 836 N。
自適應控制器內部自適應參數Kc、d0的變化曲線如圖7所示。
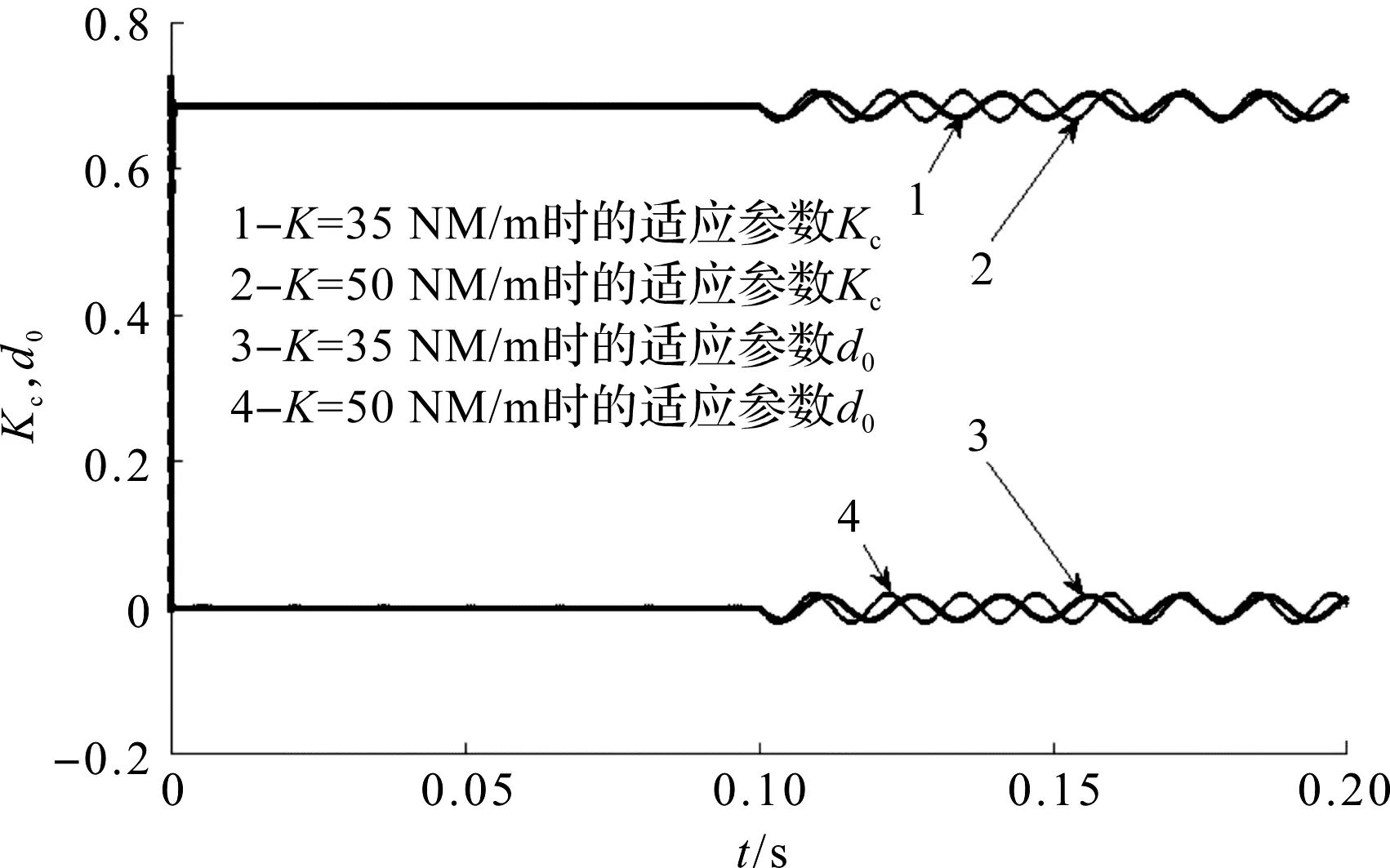
圖7 自適應參數Kc、d0變化曲線
由圖7可知:
自適應力系統通過快速調整控制器參數,有效抑制了位置干擾對系統控制精度和穩定性的影響,使其穩態誤差接近于0 N。
5 結束語
針對位置擾動型被動式電液力系統中負載剛度變化會導致系統不穩定、控制精度差等問題,本研究設計了基于主導極點模型參考自適應控制器,通過仿真分析可得到如下結論:
(1)電液力系統加入自適應控制后,其跟蹤精度與自適應系數R有關,R越大,系統跟蹤誤差越小,誤差收斂速度越快。當R=100 000時,誤差最大值為0.03 N,誤差收斂時間為0.8 ms,系統能夠快速準確的跟蹤參考模型;
(2)電液力系統響應過程中的波動現象與負載剛度K有關,當K>13 MN/m時,K越大,波動現象越劇烈。加入自適應控制后,系統在20.7 ms內快速跟蹤指令信號并消除波動現象,有效提高了系統的控制精度和響應速度;
(3)電液力系統在5 Hz時響應特性較差,加入自適應控制后,系統在14 Hz情況下依然能很好的跟蹤指令信號,并保持較高的控制精度,有效拓展了系統頻寬;
(4)電液力系統受到位置干擾時,其輸出力短時間發生劇烈變化,控制精度受到嚴重影響,而加入自適應控制后,位置干擾對系統影響極小,有效提高了系統的抗干擾能力。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56