基于模糊PID算法的雙閉環(huán)直流調(diào)速系統(tǒng)中的設(shè)計(jì)
2020-07-23 08:54:49朱嶸濤陳希湘
現(xiàn)代電子技術(shù) 2020年14期
朱嶸濤 陳希湘
摘? 要: 設(shè)計(jì)一種基于模糊PID算法的雙閉環(huán)直流調(diào)速系統(tǒng),其主要由三相對(duì)稱交流電壓源、晶閘管整流橋、同步6脈沖觸發(fā)器、轉(zhuǎn)速調(diào)節(jié)器、電流調(diào)節(jié)器和直流電機(jī)等組成。系統(tǒng)以模糊PID算法為控制核心,由同步6脈沖觸發(fā)器產(chǎn)生脈沖來(lái)實(shí)現(xiàn)對(duì)直流電機(jī)的速度調(diào)節(jié)。目標(biāo)轉(zhuǎn)速值確定后,通過(guò)仿真對(duì)比傳統(tǒng)工程整定法和模糊PID算法,結(jié)果表明,兩種方法都實(shí)現(xiàn)了對(duì)電機(jī)轉(zhuǎn)速的控制,但模糊PID算法的轉(zhuǎn)速曲線更平滑、調(diào)節(jié)時(shí)間更短、超調(diào)更小,能滿足工控領(lǐng)域要求。
關(guān)鍵詞: 雙閉環(huán)直流調(diào)速; 系統(tǒng)設(shè)計(jì); 系統(tǒng)組成; 模糊PID算法; 模塊建模; 仿真測(cè)試
中圖分類號(hào): TN722.7+2?34; TP242? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼: A? ? ? ? ? ? ? ? ? ? ?文章編號(hào): 1004?373X(2020)14?0034?04
Design of double closed?loop DC speed governing system based on fuzzy PID algorithm
ZHU Rongtao, CHEN Xixiang
(Yangtze University College of Technology & Engineering, Jingzhou 434020, China)
Abstract: A double closed?loop DC speed governing system based on fuzzy PID algorithm is designed. The system is composed of three?phase symmetrical AC voltage sources, thyristor rectifier bridge, synchronous 6?pulse trigger, speed governor, current regulator and DC motor. In the system, the fuzzy PID algorithm is taken as the control core, and synchronous 6?pulse trigger is used to produce pulses to realize the speed governing of DC motor. After the target rpm value is determined, the simulation comparison between the traditional engineering tuning method and the fuzzy PID method is carried out. The results show that both methods can control the motor speed, but the fuzzy PID algorithm rotational speed curve is smoother, its adjustment time is shorter and its overshoot is smaller, which can meet the requirements of industrial control field.
Keywords: close?loop DC speed governing; system design; system composition; fuzzy PID algorithm; module modeling; simulation testing
在工業(yè)生產(chǎn)和制造過(guò)程中,電機(jī)轉(zhuǎn)速是一個(gè)非常重要的參數(shù),因此對(duì)實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的精確控制顯得非常重要。直流電機(jī)轉(zhuǎn)速受到轉(zhuǎn)動(dòng)慣量、轉(zhuǎn)矩、電壓、勵(lì)磁磁通等諸多因素影響,其轉(zhuǎn)速穩(wěn)定是一個(gè)非穩(wěn)態(tài)過(guò)程。模糊PID算法克服了傳統(tǒng)PID算法無(wú)法實(shí)時(shí)調(diào)整PID參數(shù)的缺點(diǎn),且無(wú)需建立復(fù)雜的數(shù)學(xué)模型和控制效果好等優(yōu)點(diǎn)已廣泛應(yīng)用在工業(yè)生產(chǎn)中。該系統(tǒng)以模糊PID算法作為控制中心,通過(guò)不斷改變導(dǎo)通角來(lái)實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的調(diào)節(jié),在提高系統(tǒng)精度的同時(shí)也使電機(jī)轉(zhuǎn)速得到有效控制。
1? 系統(tǒng)整體設(shè)計(jì)
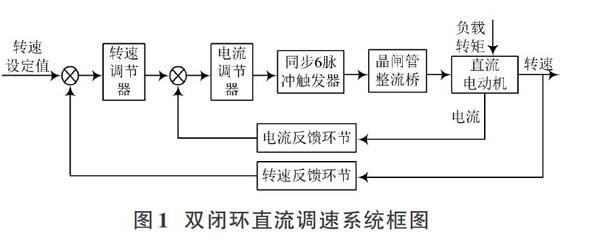
雙閉環(huán)直流電機(jī)調(diào)速系統(tǒng)主要由三相對(duì)稱交流電壓源、晶閘管整流橋、同步6脈沖觸發(fā)器、轉(zhuǎn)速調(diào)節(jié)器、電流調(diào)節(jié)器和直流電動(dòng)機(jī)等組成,系統(tǒng)整體框圖如圖1所示。
2? 經(jīng)典PID算法
按偏差的比例、積分和微分進(jìn)行控制的算法簡(jiǎn)稱為PID(Proportional?Integral?Differential)算法。
模擬PID算法的表達(dá)式為[1?2]:
[u(t)=KPe(t)+1TI0te(t)dt+TDde(t)d(t)]? ? ?(1)
式中:[u(t)]為PID調(diào)節(jié)器的輸出;[e(t)]為PID調(diào)節(jié)器的偏差,即設(shè)定值r(t)與實(shí)際測(cè)量值y(t)之間的偏差;[KP],[TI],[TD]分別為調(diào)節(jié)器的比例系數(shù)、積分系數(shù)和微分系數(shù)。
模擬PID算法不能直接在Simulink中應(yīng)用。當(dāng)采樣周期足夠小時(shí),通過(guò)數(shù)值逼近的方法,用求和代替積分,用后向差分代替微分,便可得到數(shù)字式PID算法表達(dá)式[3]:
[u(k)=KPe(k)+TTIj=0ke(j)+TDe(k)-e(k-1)T]? (2)
在式(2)中,令:
[KI=KPTTI,? KD=KP·TDT]
則PID算法的表達(dá)式為:
[u(k) =KPe(k)+KIj=0ke(j)+KDe(k)-e(k-1)]? (3)
3? 模糊PID控制及其算法
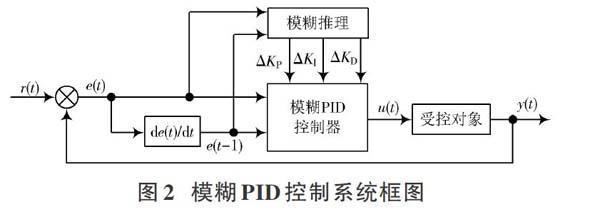
模糊PID控制器的結(jié)構(gòu)如圖2所示,采用模塊直接搭建的模糊PID控制器算法會(huì)非常繁瑣,故采用S函數(shù)的方式來(lái)構(gòu)建該模塊[4?6]。
在式(3)中,計(jì)算[j=0ke(j)]非常繁瑣,故引入狀態(tài)變量[x(k)=j=0ke(j)],故可推導(dǎo)出狀態(tài)方程式:
[x(k)=x(k-1)+e(k-1)]? ? ? ? ? (4)
由模糊邏輯整定PID的表達(dá)式,將式(3)改寫成:[u(k) =KP(k)e(k)+KI(k)x(k)+? ? ? ? ? ? ? ? KD(k)e(k)-e(k-1)] (5)
式中,[KP(k)],[KI(k)],[KD(k)]的表達(dá)式如下:
[KP(k)=KP(k-1)+λPΔKPKI(k)=KI(k-1)+λIΔKIKD(k)=KD(k-1)+λDΔKD]? ? ? ?(6)
式中:[λP],[λI],[λD]均為常數(shù);[ΔKP],[ΔKI],[ΔKD]的大小由PID模糊邏輯參數(shù)表決定。
4? 系統(tǒng)主要單元模塊建模
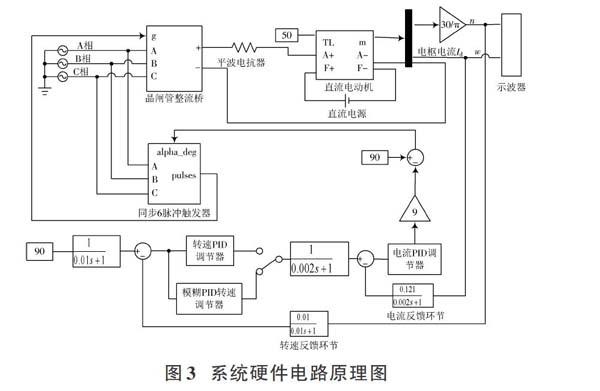
雙閉環(huán)直流調(diào)速系統(tǒng)Simulink仿真圖如圖3 所示,直流電動(dòng)機(jī)輸出的4個(gè)信號(hào)從上至下分別是:電機(jī)角速度、電樞電流、勵(lì)磁電流和勵(lì)磁電磁轉(zhuǎn)矩。該系統(tǒng)中只需研究電機(jī)角速度和電樞電流,故只將這兩個(gè)信號(hào)引出,電動(dòng)機(jī)輸出信號(hào)為角速度ω,需將其轉(zhuǎn)化成轉(zhuǎn)速(n=60[ω(2π)]),因此電動(dòng)機(jī)角速度輸出端接Gain模塊,參數(shù)設(shè)置為[30π]。額定負(fù)載轉(zhuǎn)矩為50。
4.1? 同步6脈沖觸發(fā)器建模
同步6脈沖觸發(fā)器的建模如圖4所示。其中alpha_deg為導(dǎo)通角,輸出脈沖由導(dǎo)通角大小來(lái)決定,輸出脈沖又去控制整流橋的輸出電壓。
在Matlab中同步6脈沖觸發(fā)器的輸入信號(hào)為導(dǎo)通角α,整流橋輸出電壓Ud0=Ud0(MAX)cos α。當(dāng)α=0°時(shí),Ud0=Ud0(MAX),此時(shí)電機(jī)轉(zhuǎn)速達(dá)到最大值;當(dāng)α<90°,整流橋處于整流狀態(tài),電機(jī)轉(zhuǎn)速由α確定。
4.2? 電流PID調(diào)節(jié)器建模
電流PID調(diào)節(jié)器建模采用工程整定法,具體計(jì)算出的電流調(diào)節(jié)器的傳遞函數(shù)為:[WACR=KI+1τiS=0.43+58.8231S]。
4.3? 轉(zhuǎn)速PID調(diào)節(jié)器建模
轉(zhuǎn)速PID調(diào)節(jié)器建模采用工程整定法,計(jì)算過(guò)程中ASR的傳遞函數(shù)為:[WASR=Kn+1(τnS)=6.02+11.494S]。
4.4? 模糊轉(zhuǎn)速PID調(diào)節(jié)器建模
根據(jù)式(5)和式(6),可以寫出對(duì)應(yīng)的S函數(shù)并封裝出對(duì)應(yīng)的模糊控制模塊,其內(nèi)部結(jié)構(gòu)如圖5所示。
在模糊PID調(diào)節(jié)器中,根據(jù)經(jīng)驗(yàn)可以構(gòu)造出表1、表2和表3,并根據(jù)該模糊規(guī)則表在Matlab環(huán)境下輸入模糊推理系統(tǒng),該系統(tǒng)有2路輸入和3路輸出。該模型中輸入和輸出變量的范圍均取(-3,3),如表1~表3所示[7?10]。
5? 系統(tǒng)仿真測(cè)試
文中為了比較模糊PID調(diào)節(jié)器和轉(zhuǎn)速PID調(diào)節(jié)器的效果,采用手動(dòng)開(kāi)關(guān)的形式進(jìn)行選擇。
5.1? 轉(zhuǎn)速PID調(diào)節(jié)器下系統(tǒng)輸出測(cè)試
在圖3所示的Simulink原理圖中,首先對(duì)傳統(tǒng)工程整定法設(shè)計(jì)的轉(zhuǎn)速PID調(diào)節(jié)器進(jìn)行測(cè)試,轉(zhuǎn)速設(shè)定值為10(其對(duì)應(yīng)的轉(zhuǎn)速為1 000 r/min),將手動(dòng)開(kāi)關(guān)與轉(zhuǎn)速PID調(diào)節(jié)器相連,其輸出曲線如圖6所示。
圖6中,在0.347 s轉(zhuǎn)速達(dá)到最大值1 204 r/min,在2 s時(shí)轉(zhuǎn)速穩(wěn)定下來(lái),對(duì)應(yīng)轉(zhuǎn)速穩(wěn)態(tài)值為1 007 r/min,其轉(zhuǎn)速最大超調(diào)量為19.5%。
5.2? 模糊轉(zhuǎn)速PID調(diào)節(jié)器下系統(tǒng)輸出測(cè)試
在圖3中,轉(zhuǎn)速設(shè)定值為10(其對(duì)應(yīng)的轉(zhuǎn)速為1 000 r/min),將手動(dòng)開(kāi)關(guān)與模糊轉(zhuǎn)速PID調(diào)節(jié)器相連,其輸出曲線如圖7所示。
圖7中,在0.337 s時(shí)轉(zhuǎn)速達(dá)到最大值1 029 r/min,在1 s時(shí)轉(zhuǎn)速穩(wěn)定下來(lái),對(duì)應(yīng)轉(zhuǎn)速穩(wěn)態(tài)值為1 005 r/min,其轉(zhuǎn)速最大超調(diào)量為2.4%。與圖6相比,圖7中電機(jī)轉(zhuǎn)速超調(diào)量更小,且曲線更加平滑。為了更好地對(duì)比兩種方法下對(duì)雙閉環(huán)直流調(diào)速系統(tǒng)的控制效果,引入了轉(zhuǎn)速最大值、轉(zhuǎn)速最大值調(diào)節(jié)時(shí)間、轉(zhuǎn)速穩(wěn)態(tài)值、轉(zhuǎn)速調(diào)節(jié)時(shí)間、最大超調(diào)量和殘余偏差6個(gè)指標(biāo),并將各項(xiàng)數(shù)據(jù)統(tǒng)計(jì)后整合在表4中。
從表4中可知,模糊PID算法在這6項(xiàng)指標(biāo)中都要優(yōu)于傳統(tǒng)的工程整定法。與傳統(tǒng)工程整定法相比,轉(zhuǎn)速調(diào)節(jié)時(shí)間縮短了1 s的前提下,轉(zhuǎn)速的穩(wěn)態(tài)值更接近轉(zhuǎn)速設(shè)定值,且最大超調(diào)量降低了17.1%。因此模糊轉(zhuǎn)速PID調(diào)節(jié)器的控制效果更好。
6? 結(jié)? 語(yǔ)
本文設(shè)計(jì)的雙閉環(huán)直流調(diào)速系統(tǒng),運(yùn)用模糊PID算法實(shí)現(xiàn)對(duì)電機(jī)速度的調(diào)節(jié)。測(cè)試結(jié)果表明,該系統(tǒng)的調(diào)節(jié)效果比傳統(tǒng)的工程整定法更好,轉(zhuǎn)速調(diào)節(jié)更平滑且超調(diào)更小,很適合應(yīng)用在工控領(lǐng)域。
注:本文通訊作者為陳希湘。
參考文獻(xiàn)
[1] 朱嶸濤,武洪濤.基于增量式PID算法的直流電機(jī)調(diào)速系統(tǒng)[J].儀表技術(shù)與傳感器,2017,54(7):121?126.
[2] 賈智,趙巖,張兵,等.基于小波神經(jīng)網(wǎng)絡(luò)PID的戰(zhàn)車自適應(yīng)巡航算法[J].兵器裝備工程學(xué)報(bào),2019,40(3):161?164.
[3] 鄧劍,潘尚峰.基于模糊PID自適應(yīng)控制的動(dòng)力卡盤動(dòng)態(tài)扭矩加載研究[J].機(jī)床與液壓,2019,47(3):64?67.
[4] 胡改玲,桂亮,權(quán)雙璐,等.串聯(lián)模糊PID控制的四旋翼無(wú)人機(jī)控制系統(tǒng)設(shè)計(jì)[J].實(shí)驗(yàn)技術(shù)與管理,2019,36(3):132?135.
[5] 周克良,過(guò)振宇.基于模糊自適應(yīng)PID的推擠機(jī)線徑預(yù)測(cè)控制[J].計(jì)算機(jī)仿真,2019,36(3):302?305.
[6] 柴鈺,王喬.粒子群優(yōu)化模糊PID的履帶機(jī)器人運(yùn)動(dòng)控制研究[J].現(xiàn)代電子技術(shù),2018,41(18):49?52.
[7] 郭志強(qiáng),余紅英,劉搖琛.基于模糊PID的高速振鏡電機(jī)控制[J].微特電機(jī),2019,47(4):61?64.
[8] 孫鳳,張琪,徐方超.激光光路控制電磁作動(dòng)器的模糊 PID控制特性分析[J].兵工學(xué)報(bào),2019,40(2):430?435.
[9] 魏小宇,鄭晟.運(yùn)用灰色預(yù)測(cè)與模糊加權(quán)PID的反應(yīng)釜溫度控制[J].重慶理工大學(xué)(自然科學(xué)),2019,33(2):82?85.
[10] 張占立,鄭肖莉,王恒迪,等.模糊自適應(yīng)PID控制器在材料低周疲勞試驗(yàn)機(jī)中的應(yīng)用[J].軸承,2019,33(2):51?55.

- 現(xiàn)代電子技術(shù)的其它文章
- 基于NAO機(jī)器人的數(shù)字識(shí)別
- 基于視覺(jué)傳達(dá)的產(chǎn)品設(shè)計(jì)目標(biāo)信息顯著性 定位系統(tǒng)設(shè)計(jì)
- 無(wú)人機(jī)中繼測(cè)控?cái)?shù)據(jù)鏈設(shè)計(jì)
- 基于云平臺(tái)和分布式處理技術(shù)的實(shí)驗(yàn)室 遠(yuǎn)程監(jiān)控系統(tǒng)
- 基于大數(shù)據(jù)分析技術(shù)的旅游智慧平臺(tái)設(shè)計(jì)
- 基于機(jī)器學(xué)習(xí)算法的圖書(shū)館書(shū)目協(xié)同推薦系統(tǒng)