能量有效的水質傳感器網絡優化部署方法
2020-07-23 08:54:49申志平孫茜王小藝許繼平張慧妍王立
現代電子技術 2020年14期
申志平 孫茜 王小藝 許繼平 張慧妍 王立

摘? 要: 將待監測水域中水質參數波動較大的區域定義為重點監測區域,水質參數波動較小的區域定義為非重點監測區域。重點監測區域由于其水質參數波動頻繁,需要覆蓋更多的傳感器以提高其檢測精度。為提高資源利用率,在不增加傳感器個數的情況下,將非重點監測區域內的傳感器移動到重點監測區域中。首先,利用Voronoi圖定位重點監測區域目標節點的位置,根據能量矩陣確定移動節點和目標節點一一對應的關系。然后,通過點對點移動策略(PPMS)實現對節點的重新部署,使重點監測區域得到更加有效的覆蓋。仿真結果表明,該方法可以較大程度地減少傳感器的移動距離,減少網絡達到平衡點的時間,在不影響整體監測水域監測效果的情況下,實現對重點監測區域更為有效的覆蓋。
關鍵詞: 網絡優化; 節點部署; 水質監測; 節點定位; 點對點移動; 仿真分析
中圖分類號: TN711?34; TP212? ? ? ? ? ? ? ? ? ?文獻標識碼: A? ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2020)14?0097?04
Energy?efficiency method of network optimization deployment for water quality sensor
SHEN Zhiping, SUN Qian, WANG Xiaoyi, XU Jiping, ZHANG Huiyan, WANG Li
(School of Computer and Information Engineering,Beijing Technology and Business University, Beijing 100048, China)
Abstract: The areas with large fluctuation of water quality parameters in the water area to be monitored are defined as the key monitoring areas, and the areas with small fluctuation of water quality parameters are defined as the non?key monitoring areas. As the frequent fluctuations of the water quality parameters in the key monitoring areas, the more sensors need to be covered to improve their detection accuracy. The sensors in the non?key monitoring area are moved to the key monitoring area without increasing the number of sensors, so as to improve the resource utilization rate. The Voronoi diagram is used to locate the target node of the key monitoring area, and the one?to?one correspondence between the mobile node and the target node is determined according to the energy matrix. The redeploy of the nodes are realized by means of the point?to?point mobility strategy (PPMS), so that the key monitoring areas can be more effectively covered. The simulation results show that the method can reduce the moving distance of the sensor to a large extent and the time for the network to reach the equilibrium point. It can achieve more effective coverage of the key monitoring area without affecting the monitoring effect in the overall monitoring water area.
Keywords: network optimization; node deployment; water quality monitoring; node localization; point?to?point mobility strategy; simulation analysis
0? 引? 言
無線傳感器網絡(Wireless Sensor Networks, WSNs)是由自主傳感器組成的分布式網絡[1],它用于監測物理和環境條件中溫度、聲音等參數。目前WSNs在衛生保健、災害管理與預防、滑坡探測、水質監測等各個領域[2?4]中發揮著非常重要的作用。無線傳感器網絡由相互連接的節點和傳感器組成,每個節點連接一個或多個傳感器,其中節點的數量取決于所覆蓋區域的大小,通過節點采集和處理網絡覆蓋區域中感知對象的信息,并把信息發送給觀察者。
水質傳感器網絡是監視和測定水體中污染物的種類、各類污染物的濃度及變化趨勢,評價水質狀況的過程[5]。近些年來隨著生活污水、工業廢水、污染物泄露等大量人為因素的影響使得不同水域的污染程度各不相同,水域污染程度較深的區域往往含有較高的溶解氧、氨氮、高錳酸鉀等污染物質,且水質波動變化較大。水污染指數法[6]是對水體中污染物進行統計和歸納,以數值的形式綜合反應水體污染程度的方法,其可以用來作為水污染分類的定級依據,根據水污染指數法可以把待測水域分為重點監測區域和非重點監測區域。在實際的水質監測中往往通過合理的群智能優化算法,以最大化覆蓋率為優化目標,把傳感器由最初的隨機部署轉換為均勻的部署[7?8]。但對于重點監測區域,由于其數據的嚴謹性和波動性,往往需要更高的覆蓋程度[9]。因此,從資源合理利用和保證監測數據準確性的角度出發,運用無線傳感器可以移動的特點,在有限傳感器數目的條件下,把非重點監測區域的傳感器移動到重點監測區域進行實時監控。因此,移動哪些傳感器節點、按照何種路徑進行移動是本文要解決的主要問題。
文獻[10]采用多個可以移動的傳感器節點在網絡區域內隨機移動的方式,利用這種方法可以減少網絡數據的延遲,但隨機移動使得網絡整體能耗增加。文獻[11]把網絡中所有靜態節點劃分為多個簇,接著在每個簇中選擇一個節點作為簇頭,其一個簇中的其他節點數據都由其進行數據上傳,移動節點在區域內進行隨機移動。這種方法可以降低網絡的總能耗,但因為簇頭位置不夠確定,導致移動的路徑不是最短的,進而導致移動節點的能耗增加。文獻[12]中基本競標協議采用直接移動的方式,但針對的是單個節點直接的移動。
如何實現把非重點監測區域中的移動節點移動到重點監測區域之內,同時能夠最大程度地提高重點監測區域內的覆蓋程度是本文解決的重點。
本文利用Voronoi圖來定位重點監測區域內的漏洞點,即目標節點,同時根據能量距離矩陣確定移動節點和目標節點一一對應關系,通過對傳感器節點的重新部署實現了對重點監測區域的有效覆蓋。
1? 模型的建立
1.1? 區域模型
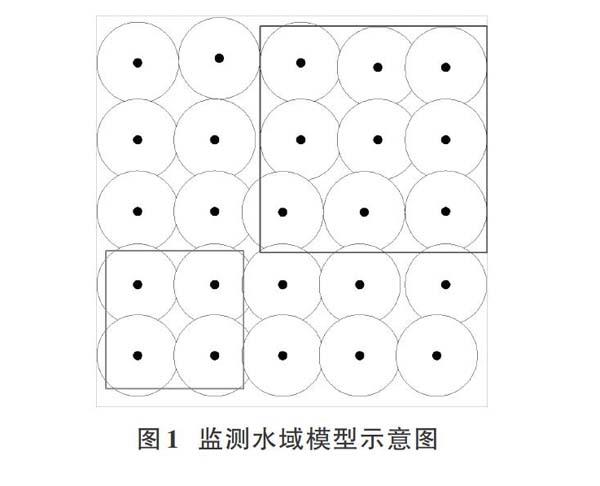
本文在監測水域的二維平面內,部署相同通信半徑和傳感半徑的傳感器節點。建立的模型如圖1所示。大框包圍的區域表示重點監測區域,小框包圍的區域表示非重點監測區域。
1.2? 網絡覆蓋率模型
圖1中所產生的網格點記為[u],區域內的網格點總數記作U,第[u]個網格點被一個傳感器監測到的概率記為c。本文采用布爾感知模型完成傳感器的覆蓋監測模型,模型的數學表達式為:
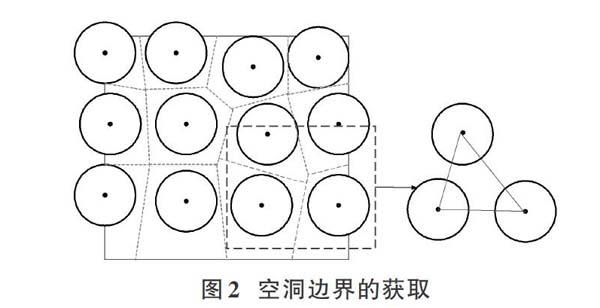
[c(s,u)=0,? ? ? ? d(si,u)≥Rc1,? ? ? ? ?d(si,u) 式中:[d(si,u)]表示傳感器節點與網格點[u]的歐氏距離,即傳感器節點[si]部署在點[(xi,yi)]上,則網格點w到[(xi,yi)] 的距離為[d(si,u)=(xi-x)2+(yi-y)2];[Rc]表示傳感器的有效監測半徑,當[d(si,u)]大于傳感器的有效半徑時,網格點[u]將不能被檢測。對于一個受監測網格,將它被整個監測區域中的所有傳感器節點檢測到的概率定義為聯合檢測概率,網格[u]的聯合檢測概率為: [Cu(Sall,u)=1-i=1n(1-Cu(Si,u))]? ? (2) 2? 確定移動節點和目標節點 為了最大程度地合理利用傳感器資源,本文在不改變傳感器個數的情況下擬將非重點監測區域的傳感器移動到重點監測區域中。其中,非重點監測區域中傳感器的節點被稱為移動節點,重點監測區域中存在的點稱為目標節點,并根據Voronoi圖來確定。 Voronoi圖是在其組成點集中連接兩個相鄰點直線的垂直平分線構成的一組連續多邊形,基于Voronoi圖定位非重點監測區域移動傳感器節點的位置,具體分為兩個步驟。 1) 利用網絡中傳感器節點構造Voronoi圖,計算均勻部署后覆蓋漏洞的邊界,如圖2所示。 2) 計算覆蓋漏洞邊界的外接矩形,用正六邊形無縫分割,如圖3所示,最后判斷正六邊形的中心是否在漏洞內,記錄漏洞內正六邊形的中心位置,作為目標節點的目標位置,統計記錄的中心位置數量。 3? 點對點移動策略 首先計算m個移動節點和n個目標節點的歐氏距離,距離計算完成后,列出距離矩陣D: [D=D11? D12? D13 … D1,j … D1,n-1? ?D1nD21? D22? D23 … D2,j … D2,n-1? D2nD31? D32? D33 … D3,j … D3,n-1? D3n ?? ? ? ?? ? ? ?? ? ? ? ??? ? ? ? ? ? ?? ? ? ? ?Di1? ?Di2? Di3 … Di,j … Di,n-1? ?Din ?? ? ? ?? ? ? ?? ? ? ? ??? ? ? ? ? ? ?? ? ? ? ?Dm1 Dm2 Dm3 … Dm,j … Dm,n-1? Dmn] 計算傳感器節點[i]移動到重點監測區域[j]消耗的能量: [Ji,j=e·Di,j] (3) 式中,e為移動傳感器移動單位距離所消耗的能量。 根據每個點的能量消耗列出能量消耗矩陣J: [J=J11? ? J12? ? J13 … J1,j … J1,n-1? ? ?J1nJ21? ? J22? ? J23 … J2,j … J2,n-1? ? J2nJ31? ? J32? ? J33 … J3,j … J3,n-1? ? J3n ?? ? ? ?? ? ? ?? ? ? ? ??? ? ? ? ? ? ?? ? ? ? ?Ji1? ? ?Ji2? ? Ji3 … Ji,j …? Ji,n-1? ? ?Jin ?? ? ? ?? ? ? ?? ? ? ? ??? ? ? ? ? ? ?? ? ? ? ?Jm1? Jm2? ?Jm3 … Jm,j … Jm,n-1? ? Jmn] 能量消耗矩陣窮舉了由移動節點到目標節點的能量消耗,根據式(4)找到能量消耗最小的節點移動路徑。 [Q=mini=1mj=1nJij, i,j有且僅取一次] (4) 式中,Q為最小的節點移動路徑上的能量消耗。 4? 實驗仿真 4.1? 實驗設計 本文采用針對性移動策略把非重點監測區域的傳感器移動到重點監測區域中,在100 m ×100 m 的水域內,以2 m為邊長劃分網格以計算覆蓋率,設定傳感器半徑為10 m。初始能量設置為10 000 J,傳感器移動1 m消耗的能量是30 J。 4.2? 實驗結果與分析 通過把非重點監測區域的傳感器移動到重點監測區域中,來增加重點監測區域的覆蓋率,圖4為均勻部署后傳感器節點分布圖,大框包圍的區域表示重點監測區域,小框包圍的區域表示非重點監測區域。 圖5為本文最終部署的結果圖,由圖5可以看出非重點監測區域內的傳感器節點移動到了重點監測區域內,大大增加了重點監測區域的覆蓋率。 圖6為覆蓋率隨時間變化圖。由圖6可以看出,隨著時間的變化,非重點監測區域中傳感器的移動,原始的均勻覆蓋被打破,使得非重點和整體監測區域的覆蓋率降低,同時隨著重點監測區域傳感器節點的增加,重點監測區域的覆蓋率逐步增加,最終達到99%。而非重點監測區域和整個監測區域的傳感器覆蓋率呈現下降的趨勢,最終分別達到穩定值66%,76%,通過移動在不增加傳感器數量的基礎上實現了對重點監測區域的有效覆蓋。 圖7為采用本文提出的點對點移動策略PPMS和隨機移動策略(Random Mobility Strategy,RMS)的移動距離對比圖,考慮到隨機移動的不確定性對實驗對比結果的影響,對隨機移動策略進行了20次實驗,對實驗結果做均值處理,得到的實驗對比如圖7所示。由圖可以看出隨機移動傳感器移動距離達到350 m,采用PPMS的移動距離為280 m,最終可以減少2 100 J的網絡能耗;同時由圖還可以看出PPMS較RMS達到平衡點的時間較短,進一步可以保證網絡的穩定性。 5? 結? 論 本文研究了水質傳感器網絡節點部署問題。首先,將待監測水域劃分為重點和非重點監測區域,利用Voronoi圖確定移動節點和目標節點;然后,通過點對點移動策略實現傳感器節點的重新部署。仿真結果表明,點對點移動策略可有效減少傳感器節點的移動距離,延長網絡的生命周期,并能使網絡在更短的時間內達到新的平衡。 注:本文通訊作者為孫茜。 參考文獻 [1] ABO?ZAHHAD M, SABOR N, SASAKI S, et al. A centralized immune?Voronoi deployment algorithm for coverage maximization and energy conservation in mobile wireless sensor networks [J]. Information fusion, 2016, 30: 36?51. [2] 程文.無線傳感器網絡研究現狀與應用[J].電子測試,2016,7(3):90?91. [3] ADU?MANU K S, TAPPARELLO C, HEINZELMAN W, et al. Water quality monitoring using wireless sensor networks: current trends and future research directions [J]. ACM transactions on sensor networks, 2017, 13(1): 4. [4] 任志玲,張廣全,林冬,等.無線傳感器網絡應用綜述[J].傳感器與微系統,2018(3):1?2. [5] 鄭群威,蘇維詞,楊振華,等.烏江流域水環境質量評價及污染源解析[J].水土保持研究,2019,26(3):204?212. [6] 孫藝珂,王琳,祁峰.改進綜合水質指數法分析黃河水質演變特征[J].人民黃河,2018,40(7):78?81. [7] 何旭,彭珍瑞,董海棠,等.加權質心魚群算法在WSNs節點優化布置中的應用[J].傳感器與微系統,2018(1):157?160. [8] 戴樂誠,俞阿龍,周星宇,等.改進粒子群算法在橋梁結構損傷識別傳感器優化布設中的應用[J].現代電子技術,2019,42(7):141?146. [9] 余幸運,孫茜,王小藝,等.基于粒子群優化算法的水質傳感器優化部署研究[J].傳感器與微系統,2016,35(12):30?32. [10] HAN G J, JIANG J F, ZHANG C Y, et al. A survey on mobile anchor node assisted localization in wireless sensor networks [J]. IEEE communications surveys & tutorials, 2017, 18(3): 2220?2243. [11] ZHANG Y M, HE S B, CHEN J M. Data gathering optimization by dynamic sensing and routing in rechargeable sensor networks [C]// 2013 IEEE International Conference on Sensing, Communications and Networking. New Orleans: IEEE, 2016: 1632?1646. [12] WANG G G, CAO G, BERMAN P, et al. Bidding protocols for deploying mobile sensors [J]. IEEE transactions on mobile computing, 2007, 6: 515?528.
