航天器非奇異自適應終端滑模姿軌聯合控制
2020-07-25 09:17:18潘菲朱宏玉
北京航空航天大學學報 2020年7期
關鍵詞:設計
潘菲,朱宏玉
(北京航空航天大學 宇航學院,北京100083)
隨著航天產業的蓬勃發展,對航天器功能需求不斷提高,航天器的飛行任務也愈加趨于復雜,編隊飛行、交會對接、不規則小行星繞飛等飛行任務,都對控制器的設計提出了挑戰。這些復雜的飛行任務中,通常都有著姿態和軌道運動的高度耦合,獨立地對兩者進行控制較難獲得滿意的控制效果。面對復雜的控制任務,姿軌耦合的控制方式更全面地考慮了姿態與軌道之間的相互影響[1],是一種更好的控制方法。
目前的姿軌耦合控制器通常是在姿軌耦合動力學模型的基礎上設計的。由于對偶四元數很好地繼承了四元數的特點,用對偶四元數描述的姿軌耦合動力學形式十分簡潔,且使用對偶四元數建模能很好地借鑒姿態控制的研究結果,故使用對偶四元數建立系統模型是目前主流的建模方法[2]。在姿軌耦合模型的基礎上可以應用的控制方法多種多樣,如經典的比例-微分(PD)控制器、滑模控制器、自動調整系統內部參數的自適應控制器、容錯控制等。文獻[3]針對跟蹤問題設計了廣義PD控制律與線性滑模控制律;文獻[4]基于浸入與不變流行理論設計了無速度反饋情況下的PD跟蹤控制;文獻[5]將PD控制器與自適應算法相結合來開發控制器,提供對未知參數和干擾的估計等。上述文獻中設計的控制方法雖均能完成跟蹤控制任務,但都屬于漸進收斂控制器,不能做到在有限時間內快速收斂。并且航天器在空間飛行過程中會受到外界干擾、模型不確定等諸多因素的影響,故要求其控制器具有較好的魯棒性,PD控制的魯棒性可能不能滿足要求。
滑模變結構控制系統的滑模運動與控制對象的參數變化和系統外界干擾無關,其系統的魯棒性要比一般常規的連續系統強,因此滑模控制器更適合于這種對魯棒性要求較高的系統。在滑模控制方面,文獻[6-7]設計了一種新型終端滑模面,并將滑模控制與神經網絡相結合抑制了滑模抖振問題,但文中只對姿態進行了控制,沒有考慮姿軌耦合的問題;文獻[8]針對姿軌耦合問題開發了終端滑模控制器、快速滑模控制器等;文獻[9-10]針對編隊飛行問題在終端滑模控制律的基礎上,設計了一種自適應容錯控制方法,但均未考慮到終端滑模控制奇異點的問題;文獻[11-12]針對航天器滑模控制中的抖振問題,設計了動態滑模控制器與高階滑模控制器,有效地抑制了抖振效果,但并未考慮有限時間控制方法,且該方法僅針對姿態進行控制。
本文針對航天器的姿軌耦合控制問題,設計了一種新型的非奇異自適應終端滑模控制器。首先,使用對偶四元數建立了具有質量參數不確定性的姿軌耦合模型;其次,設計了一種非奇異的終端滑模面,并給出了滑模控制律,該控制律能夠避免終端滑模中奇異點的問題,并具有較高的控制精度和較快的收斂速度;再次,考慮系統中質量參數的不確定性,設計了自適應律來更新參數,進一步改善了控制器的效果;最后,通過仿真驗證了控制器的有效性。
1 問題描述
1.1 四元數與對偶四元數
定義四元數為q=[q0qTv]T∈Q,其中q0∈R為標量部分,qv=[q1q2q3]T∈R3代表矢量部分。特別地,三維向量可以看作標量部分為0的四元數。將四元數的共軛定義為 q*=[q0-qTv]T;四元數q與p=[p0pTv]T∈Q的乘法法則定義為

式中:a×定義為三維列向量a生成的叉乘矩陣。
定義對偶數為[13]


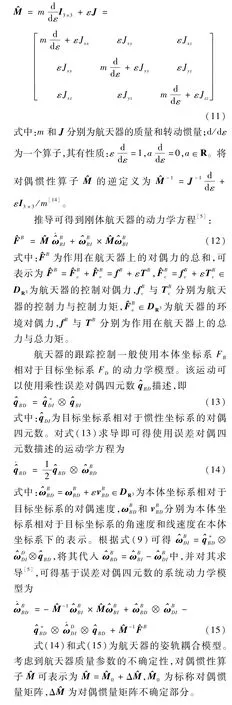
1.2 航天器姿軌耦合模型
航天器本體坐標系FB(OBXBYBZB)與航天器固連,原點OB位于航天器質心,XB、YB和ZB三軸與航天器的慣量主軸基本重合。航天器的目標坐標系FD(ODXDYDZD)為航天器期望到達的坐標系。定義慣性坐標系為FI(OIXIYIZI),當航天器姿態為零時,慣性坐標系的三軸方向與本體系重合。
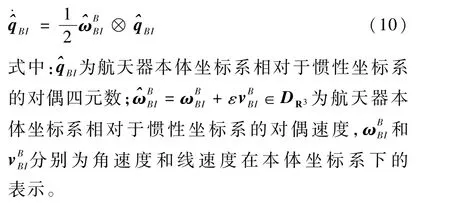
采用對偶四元數描述的航天器六自由度運動學模型為
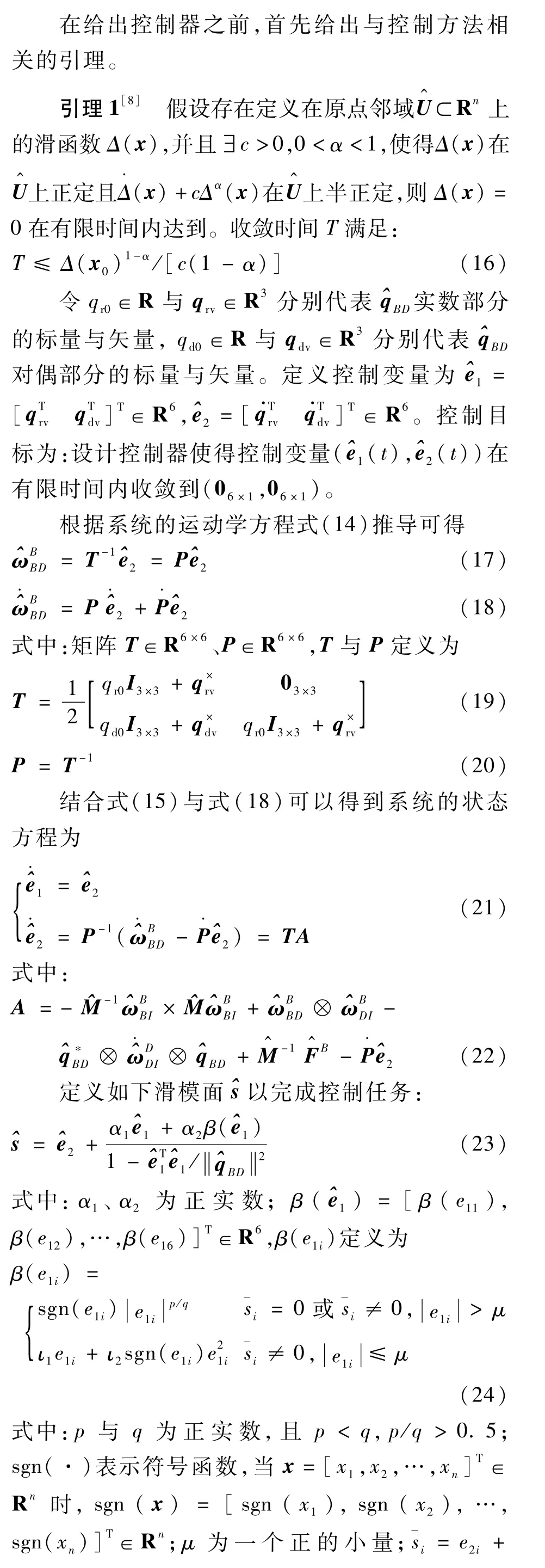
2 終端滑模控制器的設計


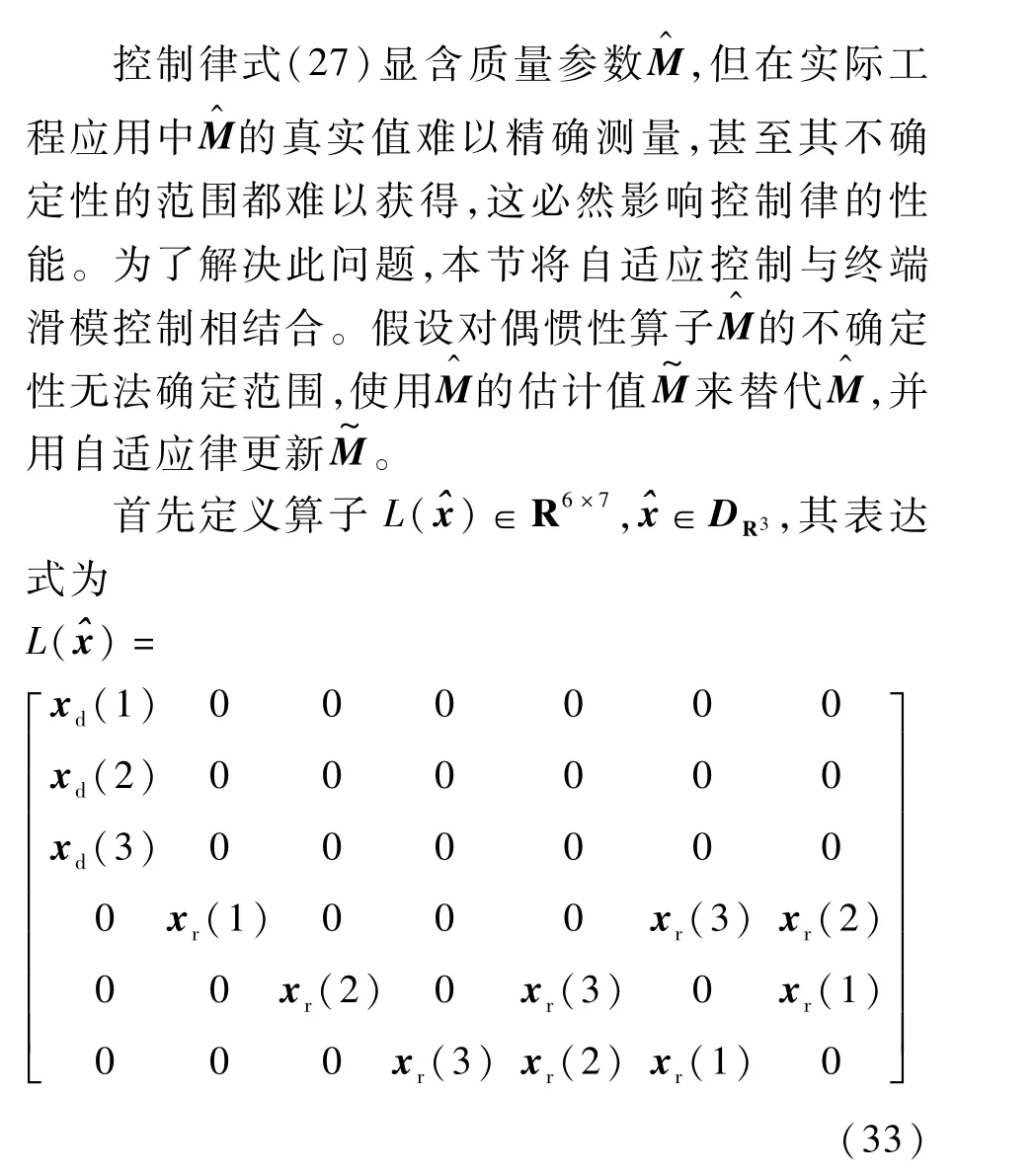
3 自適應算法的設計

4 數值仿真與結果分析
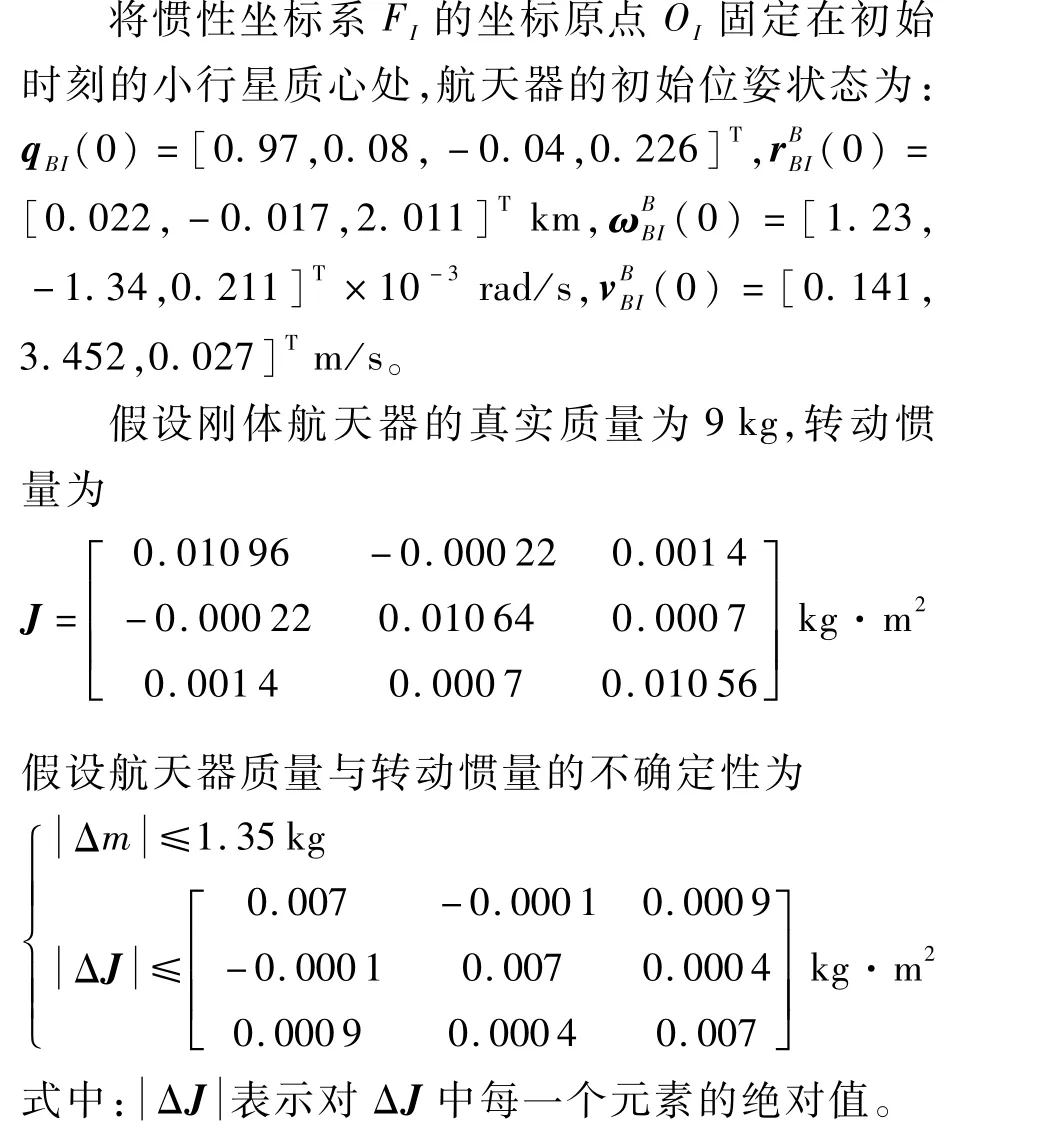
由于小行星體積小、質量小且形狀不規則,其附近引力場微弱,引力場不均勻。在這樣的力學環境中,航天器姿態與軌道耦合程度高,進行姿軌耦合控制很有必要。因此,本節以航天器繞飛小行星跟蹤控制為背景,對本文提出的控制器進行數學仿真驗證。
假設小行星的引力常數為μA=5.58×10-8km3/s2,其二階引力系數為C20=-3.05×10-3km2,C22=6.64×10-4km2。仿真的控制目標為:航天器從極軸上空按照規劃的軌跡機動到赤道上空,且在動過程中-ZB一直指向小行星質心,在航天器達到赤道上空后,航天器相對于慣性坐標系保持不變。更具體的軌跡規劃方式參考文獻[16]。
4.1 終端滑模控制算法的仿真
首先不處理航天質量特性的不確定性,對終端滑模控制算法進行仿真。
控制器參數選為α1=0.05,α2=0.001,p=3,q=5,μ=5×10-5,a=0.001,b=0.05,并假設控制器輸出的控制力能被執行機構精確地、連續地執行。為了對比控制器的優勢,設置了經典終端滑模面作為對照組[17]。其滑模面與控制器表示為

其控 制 器 參 數 選 為 α =-0.000 8,β=-0.95,k=0.33。
對2種控制器進行仿真可以得到如下結果。圖1與圖2為使用上述2種控制器進行跟蹤控制所得到的位姿跟蹤誤差曲線。仿真結果表明,本文控制算法可以使姿態四元數在120 s內收斂至10-3量級,位置誤差在90 s內收斂到10-2m量級。對比圖1與圖2發現,雖然經典終端滑模能使位置誤差更快地收斂,但總體來說時間相差無幾。
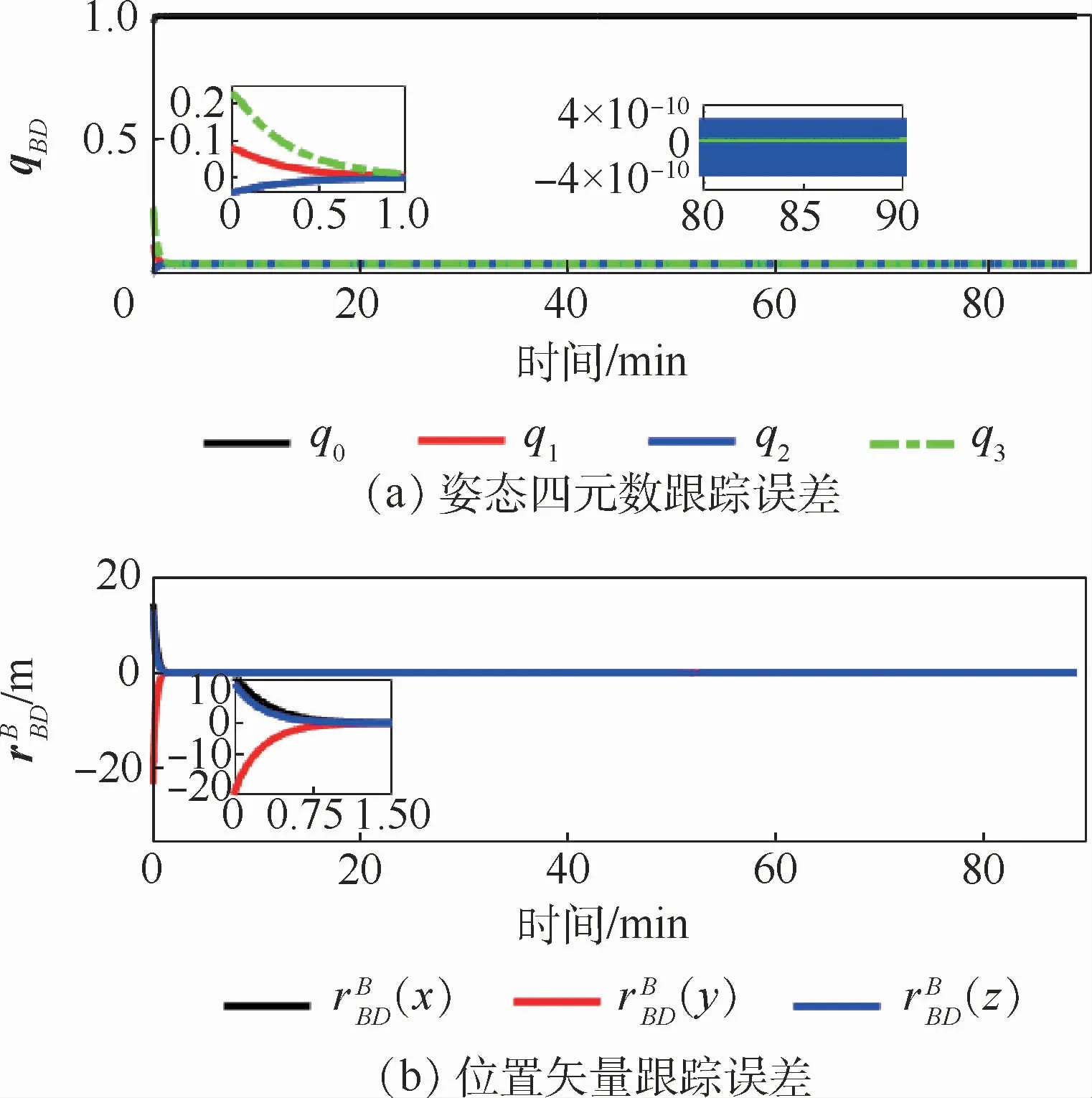
圖1 終端滑模控制位姿跟蹤誤差Fig.1 Orbit and attitude tracking error of terminal slidingmode control

圖2 對照組位姿跟蹤誤差Fig.2 Orbit and attitude tracking error in comparison group
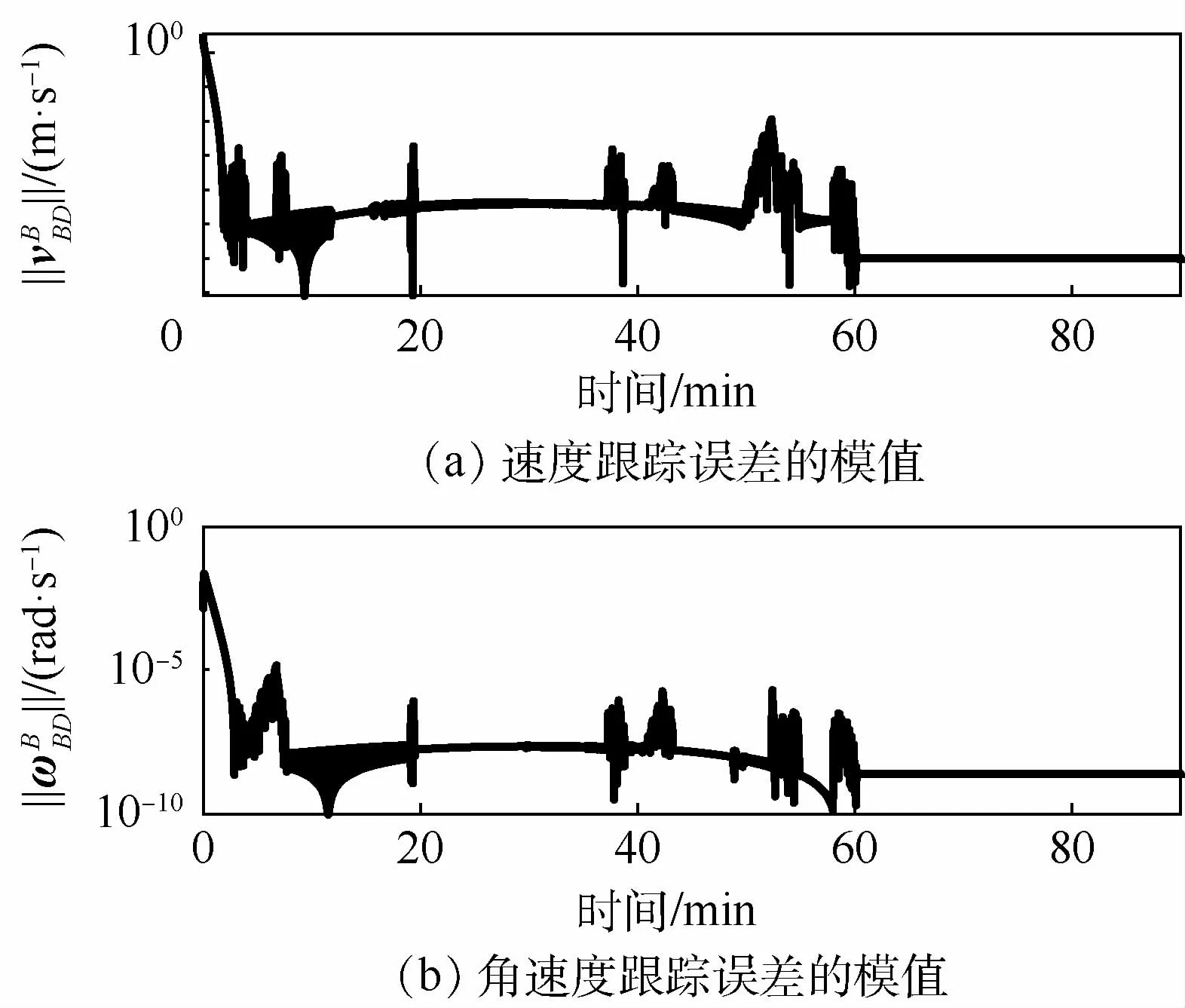
圖3 終端滑模控制速度與角速度跟蹤誤差Fig.3 Velocity and angular velocity tracking error of terminal slidingmode control

圖4 對照組速度與角速度跟蹤誤差Fig.4 Velocity and angular velocity tracking error in comparison group
圖3與圖4為上述2種控制器控制得到的角速度與線速度的跟蹤誤差模值。觀察圖3可以看出,仿真開始時有一定的跟蹤誤差,隨著仿真的進行,姿態角速度誤差能夠在300 s內收斂到10-5rad/s,線速度誤差也能收斂到10-3m/s量級。對比圖4可以發現,本文所設計的控制算法達到的控制精度更高,且發生大幅度抖振的區間較少。
圖5與圖6為使用上述2種控制器完成跟蹤任務產生的控制力與力矩的曲線,兩者都能做到快速收斂。對比兩者發現,本文中設計的控制器產生的控制力較小,超調量降低了50%左右,且對比控制力曲線可以發現,滑模的抖振從10-3量級降到10-5量級,說明本文設計的終端滑模控制器抑制滑模抖振能力強。
4.2 自適應終端滑模控制算法的仿真
通過4.1節對終端滑模控制算法的仿真結果進行分析不難發現,控制器雖然能很快地將系統狀態收斂到期望狀態,且控制力數值較小,但是控制過程中,控制力與力矩會出現小幅抖動。

圖5 終端滑模控制控制力與力矩Fig.5 Control force and torque of terminal slidingmode
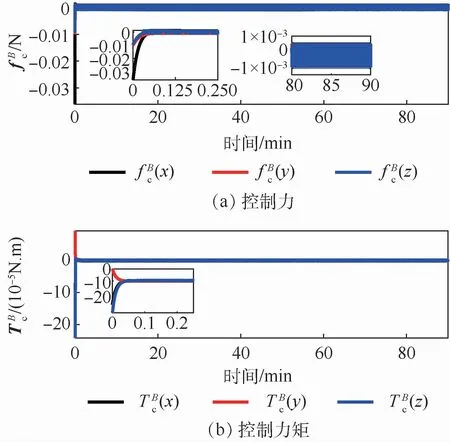
圖6 對照組控制力與力矩Fig.6 Control force and control torque in comparison group
采用與4.1節相同的仿真條件,使用自適應終端滑模控制器進行跟蹤控制,自適應算法的參數設定為γ=215 0,其仿真結果如圖7~圖9所示。
與4.1節不添加自適應控制律的終端滑模控制算法的仿真結果相比,二者的收斂速度并沒有明顯的差別,但對比圖3與圖8可以發現角速度與線速度的跟蹤誤差的抖動有了很大的抑制,另外,對比圖5與圖9可以發現,添加了自適應算法的控制器,消除了控制過程中的尖峰,使控制更加平滑。綜上,自適應控制律的加入有效地提高了控制器的效果。

圖7 自適應終端滑模控制位姿跟蹤誤差Fig.7 Orbit and attitude tracking error of adaptive terminal slidingmode control
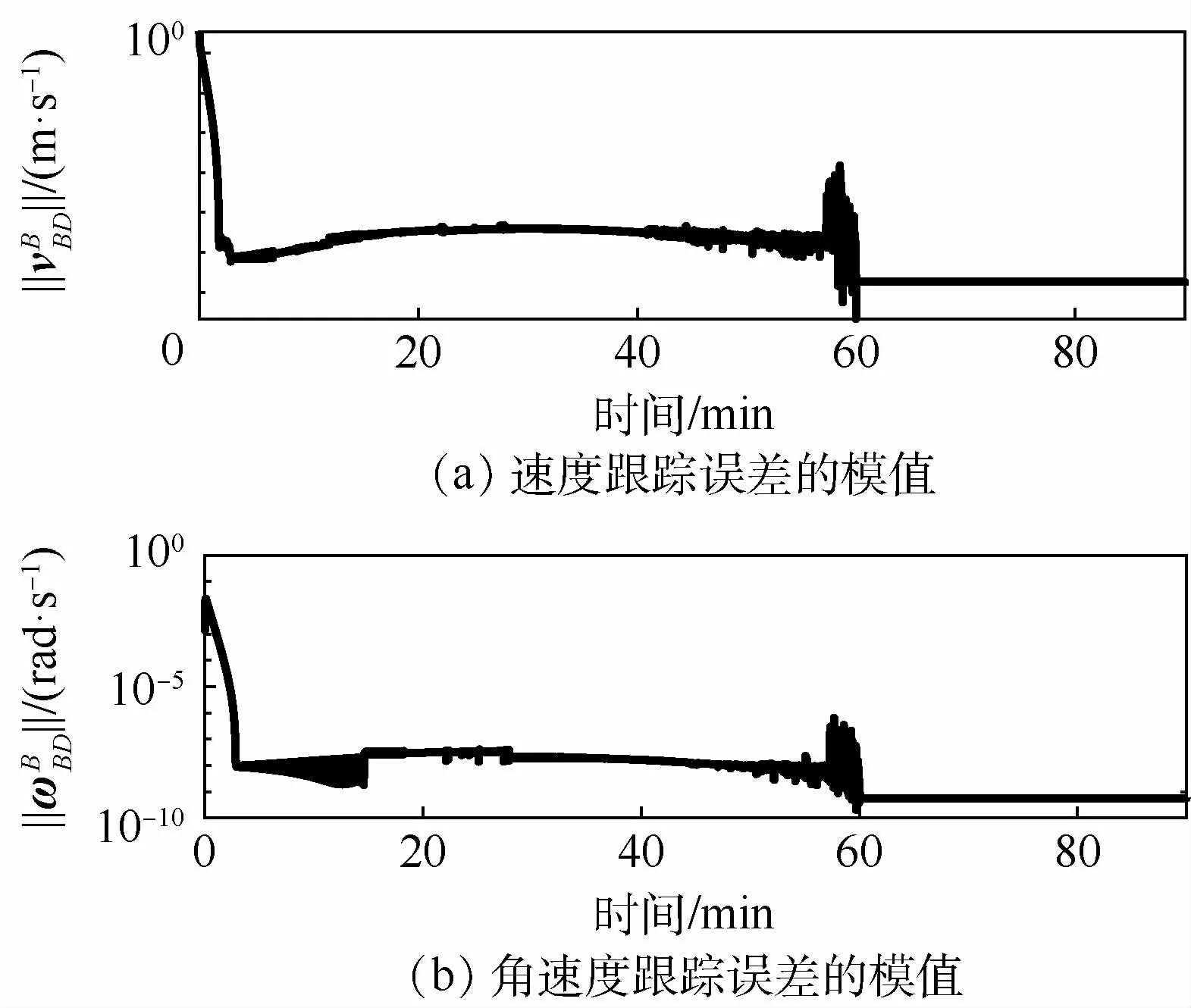
圖8 自適應終端滑模控制速度與角速度跟蹤誤差Fig.8 Velocity and angular velocity tracking error of adaptive term inal sliding mode control

圖9 自適應終端滑模控制控制力與力矩Fig.9 control force and torque of adaptive terminal sliding mode control
5 結 論
1)以對偶四元數為工具建立了航天器姿軌耦合模型,考慮到模型質量特性的不確定性,設計了一種非奇異的自適應終端滑模控制算法對航天器進行姿軌聯合控制,并通過李雅普諾夫第二方法證明了該控制器的穩定性。
2)以微小衛星繞飛小行星的跟蹤控制作為仿真背景驗證算法的有效性,相較于傳統形式的終端滑模算法,本文中設計的控制律有如下優勢:能夠解決終端滑模奇異點的問題,削弱質量參數的不確定性對系統控制的影響,產生的控制力較小,超調量較小,控制力平滑,能較好地抑制滑模控制的抖振特性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04