小型無人機總體參數對動態滑翔能力的影響
2020-07-27 08:25:52劉思奇白俊強
哈爾濱工程大學學報 2020年6期
劉思奇, 白俊強
(西北工業大學 航空學院,陜西 西安 710072)
小型無人機在軍事和民用領域中日益受到重視,應用越來越廣泛[1],但由于其自身尺寸的限制,只能在空中停留較短時間,限制了小型無人機的應用,如何提升小型無人機續航性能是當下的研究熱點之一。動態滑翔技術是一種新興的適用于小型無人機的增程控制技術,通過控制飛行策略即能有效利用風場能量減少小型無人機飛行能量消耗,是現在國際上的研究的前沿技術之一。
漂泊信天翁是動物界中動態滑翔應用的典型示例,Sachs G等[2-3]通過計算得出信天翁能夠以81 W飛行功率,在13.2 d內不間斷飛往西南太平洋,消耗相當于5.6~11.9 L汽油的能量,遠超其自身能量儲備。Rayleigh[4]分析了信天翁利用海面梯度風場從梯度風場中獲取能量的方式,并提出了Rayleigh循環,奠定了動態滑翔的研究基礎。
近年來,隨著計算機數值仿真能力的不斷提升,許多研究者試圖通過計算機數值仿真及優化手段對動態滑翔進行研究。Zhao[5]利用NPSOL軟件模擬了利用動態滑翔技術后飛機的最小燃油消耗,Gao等[6]利用能量最優原則進行了應用動態滑翔技術航路規劃,尋找到了飛機能量消耗最小的飛行路徑。Lawrance等[7-8]則分別設計開發了讓自主飛行的小型無人機依照風場自主選擇動態滑翔路徑的方式。Deittert等[9]利用微分平滑方法對遠程無動力動態滑翔飛行路徑進行了研究。國內近年對于動態滑翔的研究也取得了一定的成果,朱炳杰等[10]利用高斯偽譜法對動態滑翔最優航跡中的能量變化進行了計算。劉多能等[11]利用Runge-Kutta積分方法針對遷移形態與環繞形態的不同類型的動態滑翔飛行軌跡進行了優化分析。單上求等[12]研究了動態滑翔飛行過程中的能量轉化機理。
目前,關于動態滑翔的研究集中于飛行軌跡的優化,對于飛行器采用理想化模型,較少關注飛行器本身。本文改進了Runge-Kutta積分軌跡優化方法,減少了優化系統的設計變量與約束的個數,并對該方法進行了驗證;從能量的角度分析了動態滑翔過程中的風場能量吸收和機械能損耗規律;采用改進后的動態滑翔優化方法,研究了飛行器重量、最大升力系數、展弦比及風場強度變化指數等對飛行器動態滑翔的影響規律。
1 動態滑翔飛行建模
1.1 風場建模
側向梯度風場廣泛存在水面及地面上方數十米的大氣中,處于小型無人機的主要應用范圍內,是應用動態滑翔的前提。梯度風場常用的冪數模型表示為:
式中:VW指風場中隨不同高度h變化對應的側向風速;HR與VR則指風場代表高度與對應的代表風速。指數p被稱為風場強度變化指數,表征梯度風場的變化強度。不同p值在HR=20 m,VR=10 m/s對風場的影響如圖1所示:
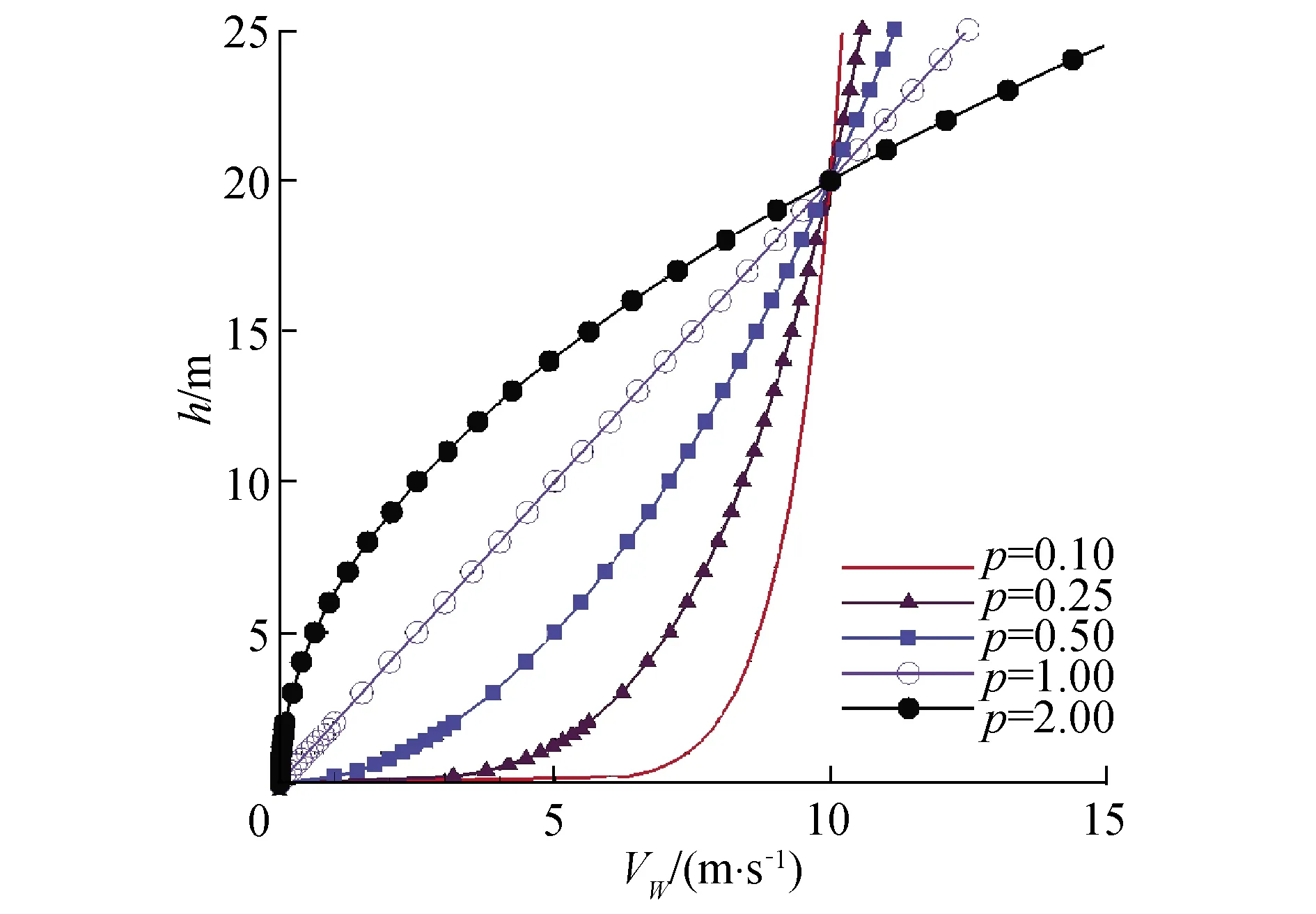
圖1 不同p值下的梯度風場模型Fig.1 Wind field model with different p
根據相關文獻[9],并綜合考慮本文小型無人機應用范圍,最終選取p=0.25,HR=20 m。在飛行仿真過程中,假設風場風速方向沿地軸系+X軸方向,地軸系坐標原點在仿真初始飛行器重心對應海平面零高度水平投影處。
1.2 動態滑翔原理介紹
動態滑翔飛行策略如圖2所示。
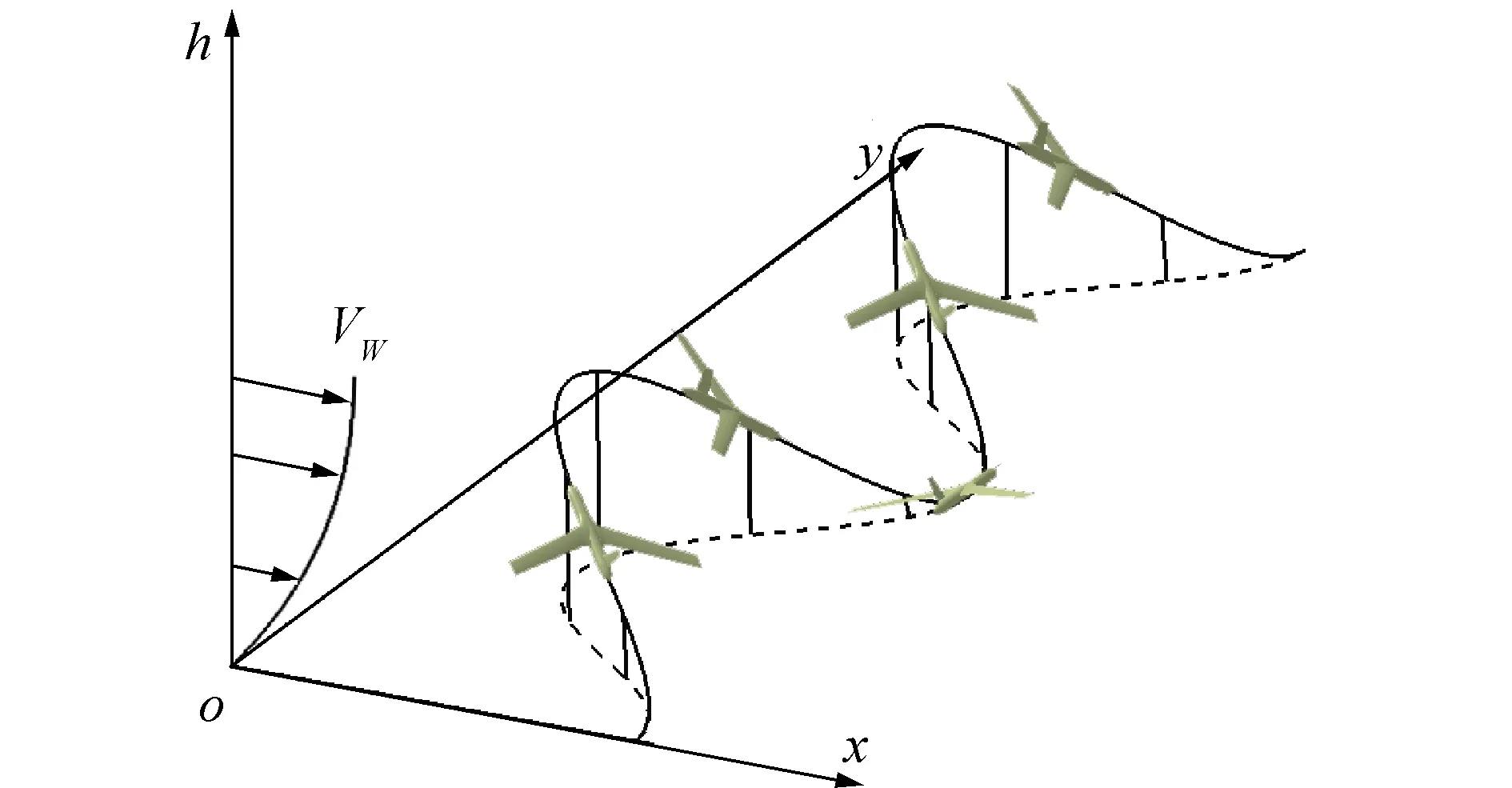
圖2 動態滑翔示意Fig.2 Path of dynamic soaring
參考信天翁的飛行模式對小型無動力無人機進行分析,在側向梯度風場中,無動力飛行器的側向速度受風場影響的表達式為:

飛機機械能表示為:
式中:V為飛行器相對地面速度;ψ為飛行器航跡偏角;γ為航跡傾角;D為飛行器阻力;m和h分別為飛行器質量與飛行高度。小型無人機單位質量能量相對時間的變化率表示為:
同時,引入輔助公式

將式(2)、(5)和(6)代入式(4)進行整理可以得到

具體推導可參考文獻[13]。式(7)反映了飛行器飛行過程中的能量變化率,其中第2項是飛行過程中由于氣動阻力等影響帶來的能量損耗,第1項則是梯度風場對能量的影響。合理調整航跡傾角γ與航跡偏角ψ使得sinγsinψ<0,從而使得第1項為正,即飛行器從風場中獲取能量。因此,通過合理的飛行控制及航跡規劃,能夠使得飛行器在不損失機械能的條件下完成飛行,進而提升航程或航時。
1.3 飛行動力學建模
飛行動力學模型采用三自由度模型,其主要的軸系及角的定義如圖3所示。
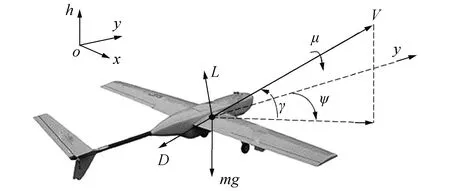
圖3 動力學模型角度及坐標定義Fig.3 Forces acting on UAV and angles
該模型中飛行器動力學及運動學模型表達為:

式中:μ為滾轉角;L、D分別為升力與阻力;(x,y,h)為飛行器在地軸系下的坐標。升力與阻力計算采用簡化模型如下:
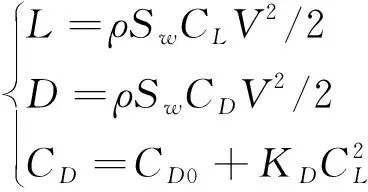
式中:CL和CD分別是升力與阻力系數;CD0為零升阻力系數;KD為誘導阻力因子。
動態滑翔數值仿真研究中常用的模型之一為信天翁等效模型[5],該模型主要參數如表1所示。

表1 飛行器模型基準參數Table 1 Aircraft model reference parameters
2 動態滑翔航跡優化方法
2.1 優化模型
無動力動態滑翔飛行動力學模型表示為:

式中:x=[V,ψ,γ,h,x,y]為系統的狀態向量;u=[μ,CL]為輸入控制向量。
動態滑翔航跡優化問題的目的就是找到合適的輸入控制向量u,使得目標函數J在滿足約束條件的前提下取得最優。在求解航跡優化問題時,將飛行航跡近似為M個離散點擬合而成的曲線,每個離散點都擁有各自對應的狀態向量x與控制向量u,因此軌跡狀態及控制未知量共有(6+2)×M個。飛行總時長tf和風場特征風速VR也是飛行軌跡優化中的重要參數。因此軌跡的總的設計變量向量可表示為:
X0=(x1,1,…,x6,1,…,x1,M,…,x6,M,
u1,1,u2,1,…,u1,M,u2,M,tf,VR)=

離散后的系統可采用Runge-Kutta積分方法[11]進行遞推求解,其基本表達式為:
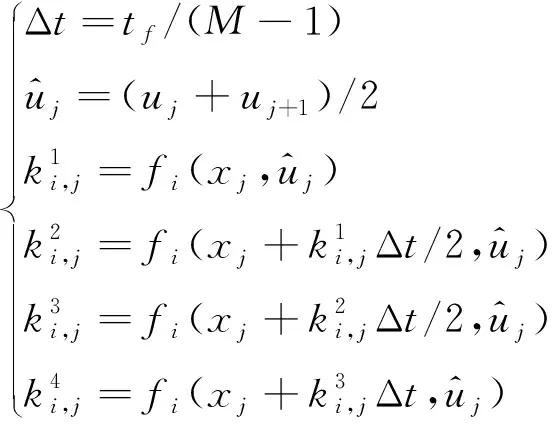
由式(12)可知,總設計變量共有8M+2個。當M=100時,共有802個設計變量,數量較多,同時還需滿足6(M-1)個等式約束:
Ci+6(j-1)=xi,j+1-xi,j-

該系統設計變量與約束較多,求解復雜,需要對該求解方法進行簡化。由于該系統必須滿足飛行動力學模型的遞推關系,飛行軌跡可以由初始點的狀態向量和各點的控制向量完全決定,因此,將前后點間的等式約束直接轉化為對后點的遞推求解:

同時,設計變量減少到2M+8個,設計變量向量為:
X=(x1,1,…,x6,1,u1,1,u2,1,…,u1,M,u2,M,tf,VR)=

這樣便有效減少了設計變量6M-6個及約束M-1個,提高了軌跡優化的效率。
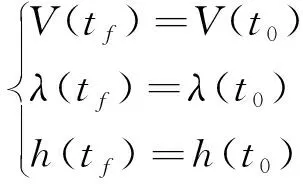
飛行器在完成一個理想的動態滑翔循環后應能返回初始飛行狀態,以保證該循環的可重復性。根據這一條件,得到約束如下:
同時為保證航向不致改變太多,對航跡傾角進行約束:
|ψ(tf)-ψ(t0)|≤Δψmax(17)
本文如無特殊說明,Δψmax取值為57.3°。為保證飛行器飛行安全,在飛行過程中還應避免飛行器及其機翼不能觸地或沒入水中,轉化為高度約束有:
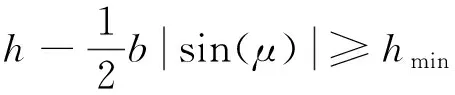
Sachs[5]的研究中則只采用了h≥0.5 m的最小高度約束,進行方法驗證時采用和Sachs相同的高度約束條件,后續研究中則采用式(18)作為高度約束條件。
為保證動態滑翔周期性的實現,飛行器損失的機械能需要通過梯度風場得到補充,外界必需的風場強度越弱說明飛行器動態滑翔能力越強,因此,能夠完成完整的動態滑翔周期的最小梯度風場代表風速就成為了一個評價動態滑翔能力的重要指標,同時也適合作為優化目標:
minJ(X)=VR(19)
該優化問題使用偽譜法和非線性規劃求解器SNOPT優化求解,應用軟件為Matlab R2013a。
2.2 動態滑翔軌跡優化仿真驗證
本文參考Sachs的研究[5]對上述優化模型進行驗證。表2給出了優化初始參數設置。
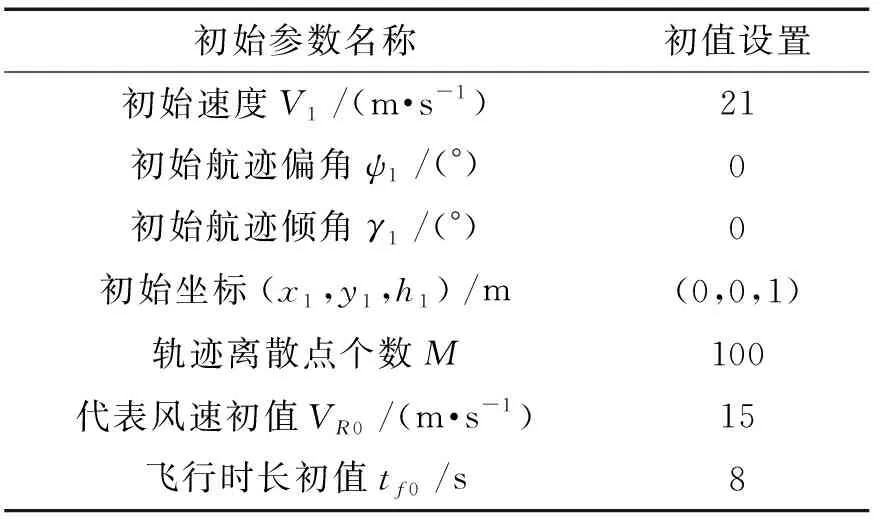
表2 初始參數設置Table 2 Initial parameter setting
表3給出了該飛行軌跡的部分參數,并和Sachs的研究進行了對比。圖4為航跡對比圖。圖5則給出了整個飛行過程中從外界風場中獲取的能量及飛行能量損耗的變化趨勢,圖6給出了飛行速度、升力控制量及滾轉角控制量的優化結果。
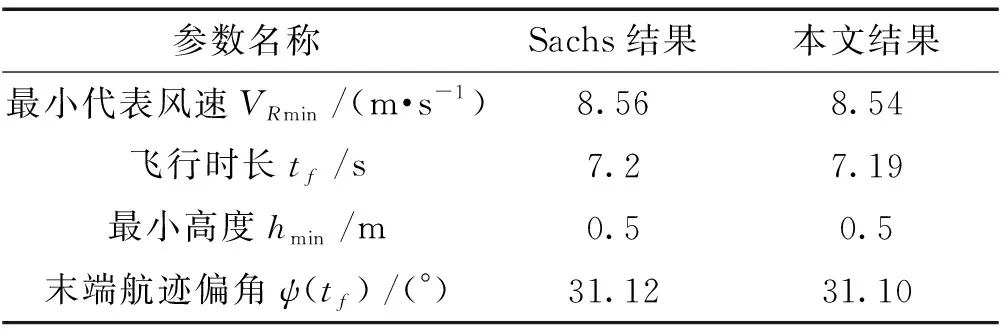
表3 動態滑翔優化結果Table 3 Optimization results of dynamic soaring
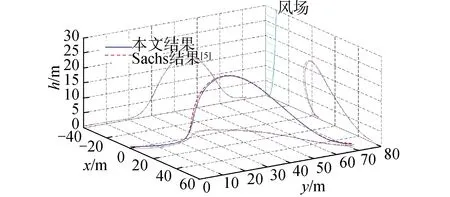
圖4 動態滑翔最小代表速度對應航跡Fig.4 Optimal dynamic soaring cycle requiring minimum wind strength
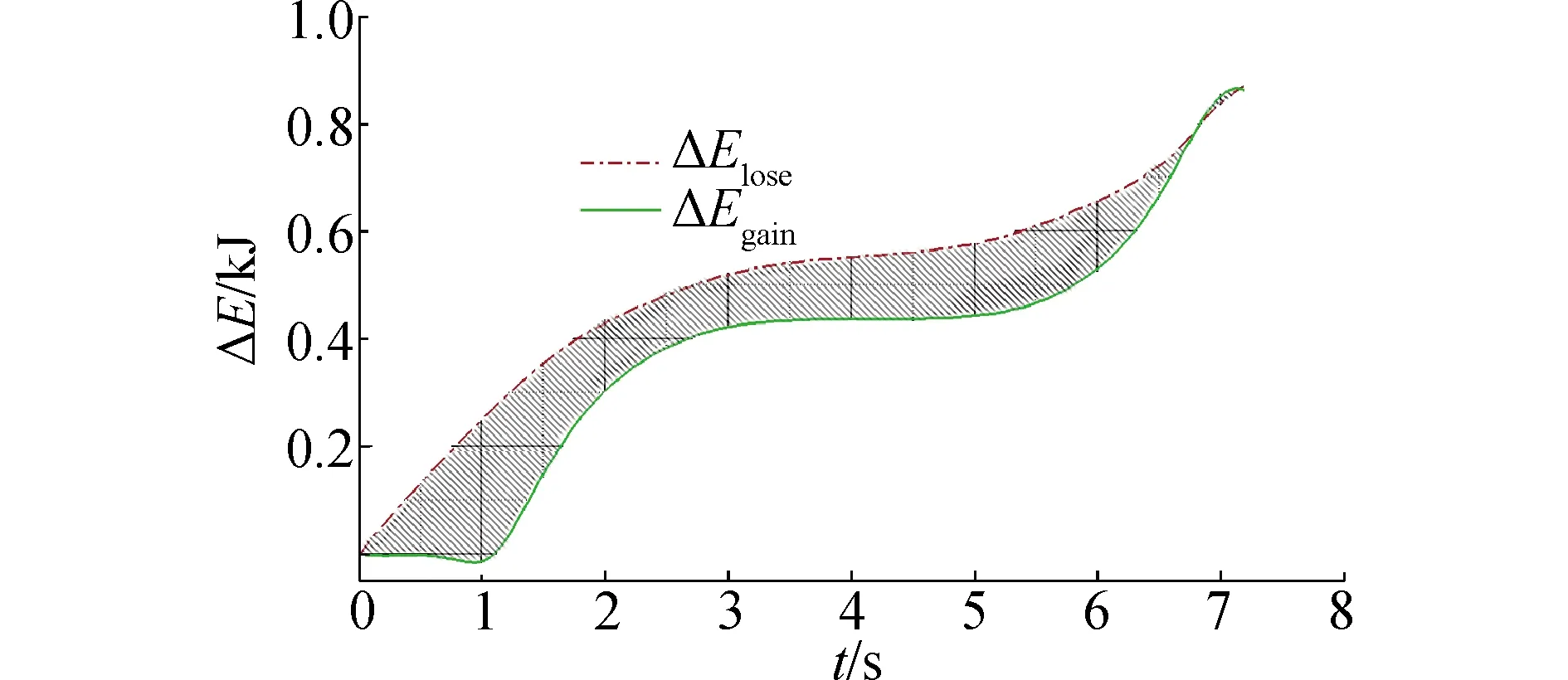
圖5 本文飛行器能量變化曲線Fig.5 Energy change of optimal dynamic soaring cycle
圖4和圖6中實線與點劃線的對比,兩者基本吻合,說明優化仿真的結果趨勢和Sachs文獻中的結果吻合的較好,說明改進型Runge-Kutta積分優化模型能夠有效完成動態滑翔軌跡優化,可以用于進一步的動態滑翔參數分析研究。

圖6 動態滑翔對應控制及狀態變量Fig.6 Variables of optimal dynamic soaring cycle
圖5中實線和點劃線分別為為飛行器從風場中獲取和飛行中消耗的的能量變化量,對應式(7)中的第1項與第2項隨時間的積分量,2者的表達式:
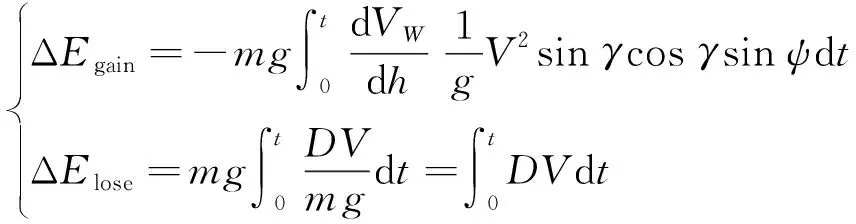
圖5中2條線之間的差量(陰影部分)即是飛行器機械能的變化量,最終2條線在終點處相交表明最終飛行器的總機械能保持和初始值相同。對比圖4和圖6,在最初受高度約束順風飛行的階段(t<1 s)飛行器從風場中獲取能量有限,接近于零;t>1 s后,飛行器開始逆風爬升,并在t=4 s左右進入高空轉彎,隨后進入順風下降階段至飛行周期結束,飛行器應用動態滑翔原理,在逆風爬升和順風下降階段均從風場內獲取了足夠的能量以抵消無動力飛行器在飛行過程中消耗的能量,這說明動態滑翔技術能夠從風場中獲取能量,有效提升飛行器滯空能力。
3 飛行器總體參數對動態滑翔能力的影響
為了探究具有更適合動態滑翔飛行的飛行器形式,針對飛行器重量、最大升力系數、展弦比及風場強度變化指數等因素對飛行器動態滑翔性能的影響開展研究。為保證研究順利進行,采用假設由于控制變量的方法通過調整翼型等變量,使本文中某一總體參數變化時其余參與討論的總體參數及表1中出現的量仍保持相同,以方便后續討論。飛行器模型基準參數采用表1中的數據,初值和表2相同。
3.1 飛行器重量
飛行器重量決定了飛行器執行任務的能力,研究重量與動態滑翔能力之間的關系對動態滑翔在實際中的應用有著重要的意義。
圖7為模型其他參數完全相同的條件下,不同重量飛行器所需的最小風場代表速度VR越小說明飛行器動態滑翔能力相對越強。從圖中可以看出,在重量處于較小值的條件下,動態滑翔能力基本不受影響;隨著重量的增大,動態滑翔所需的風場代表速度逐漸增大,且增大速度大于線性增長。在模型CLmax=1.5的約束下,常規巡航能夠支持的最大重量為17.8 kg,而在圖中當重量超過這一最大重量時,所需的風場強度急劇增長。在飛行器升力不足以維持巡航飛行的條件下,飛行器須要需要通過動態滑翔機動維持飛行高度,對外界能量獲取有更大需求,造成了所需的風場代表速度急劇增大的現象。
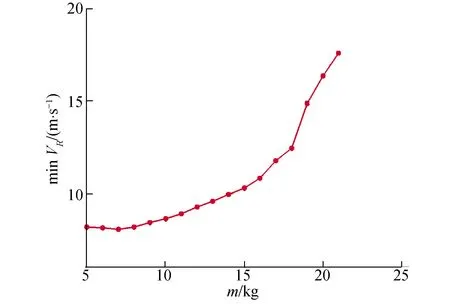
圖7 飛行器重量對動態滑翔能力的影響Fig.7 Influence of UAV mass on dynamic soaring results
更進一步探討翼載對行器動態滑翔性能的影響。翼載是單位機翼面積上的飛行器重量,在動態滑翔飛行動力學模型中主要體現為飛行器質量與機翼面積2個常量的比值,因此本文從飛行器重量變化與機翼面積變化2方面對比分析翼載對動態滑翔能力的影響。
表4中反映了通過改變飛行器重量(m0.8,m1.2,m1.4構型)、飛行器機翼面積(假設氣動參數不改變,S0.8,S1.2,S1.4構型)及同時改變重量和機翼面積(mS0.8,mS1.2,mS1.4構型)等方式改變翼載進而對動態滑翔能力產生的影響,并在圖8中對3種不同方式(分別對應Δm、ΔS、ΔmS,橫坐標為翼載的倍數N)進行了對比。
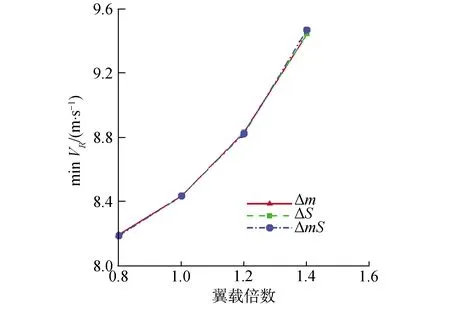
圖8 翼載對動態滑翔能力的影響Fig.8 Influence of wing load on dynamic soaring results
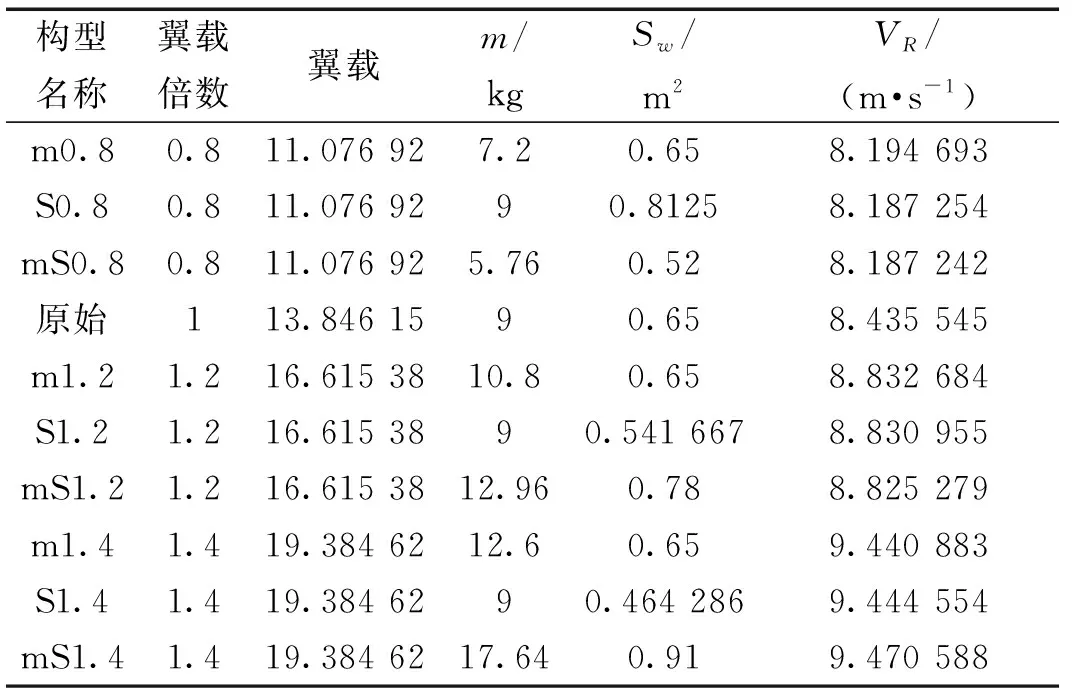
表4 翼載對動態滑翔能力的影響Table 4 Influence of wing load on dynamic soaring ability
通過對比可以發現,大翼載需要更大的最小代表風速,即較小的翼載動態滑翔能力較強;相同翼載條件下飛行器具有相同的動態滑翔能力。翼載較小的飛行器機動性能較好,而機動性能較強的飛行器在逆風爬升、順風俯沖及側風機動中更有優勢,因此小翼載飛行器動態滑翔能力更強。對于重量較大的飛行器,可以通過增大機翼面積的方式減小翼載,從而使得其動態滑翔能力獲得一定提升。
3.2 最大升力系數
最大升力系數CLmax關系到飛行器能夠提供的最大升力,是和飛行性能密切相關的總體參數。在動態滑翔飛行動力學模型中,最大升力系數是關鍵控制變量CL的主要約束,對動態滑翔過程影響較大。通過調整控制變量中最大升力系數的限制,分析其對動態滑翔能力的影響。
圖9表現了最大升力系數對動態滑翔所需最小代表風速的影響。可以看到,當最大升力系數約束大于1.4時,最小代表風速未發生明顯變化,隨著最大升力系數逐漸下降,飛行器能夠提供的最大升力也隨之下降,所需風場代表速度急劇增長,該現象與飛行器重量超過最大升力時表現一致,是由于飛行器須要通過動態滑翔維持飛行,對動態滑翔能力提出了更大要求。可見,足夠大的最大升力系數是維持飛行器動態滑翔能力的必要條件。

圖9 最大升力系數對動態滑翔能力的影響Fig.9 Influence of CLmax on dynamic soaring results
3.3 展弦比
展弦比在動態滑翔飛行動力學模型中的主要影響可以歸結為2個:
1)影響阻力系數中誘導阻力因子KD的大小:
誘導阻力因子與展弦比大小呈反比。為保證控制變量,假設展弦比的變化對其他氣動變量無明顯影響。
2)為保證飛行器與地面高度的約束不變,飛行器翼展固定的條件下,機翼面積隨展弦比變化。按照公式,有:
通過對飛行動力學模型中相關量的調整,對展弦比對動態滑翔能力的影響進行研究。
圖10中橫坐標為相對于原始模型展弦比變化的倍數,縱坐標為動態滑翔最小代表風場速度。隨著展弦比的增大,誘導阻力因子和機翼面積均會減小,阻力特性得到優化的同時全機翼載出現上升,因此會出現動態滑翔最小代表風場速度先下降在升高的趨勢,即動態滑翔能力先提高后降低。所以展弦比變化中能夠找到最適點,如圖10中1.2倍AR值處,在此展弦比下飛行器動態滑翔能力最強。
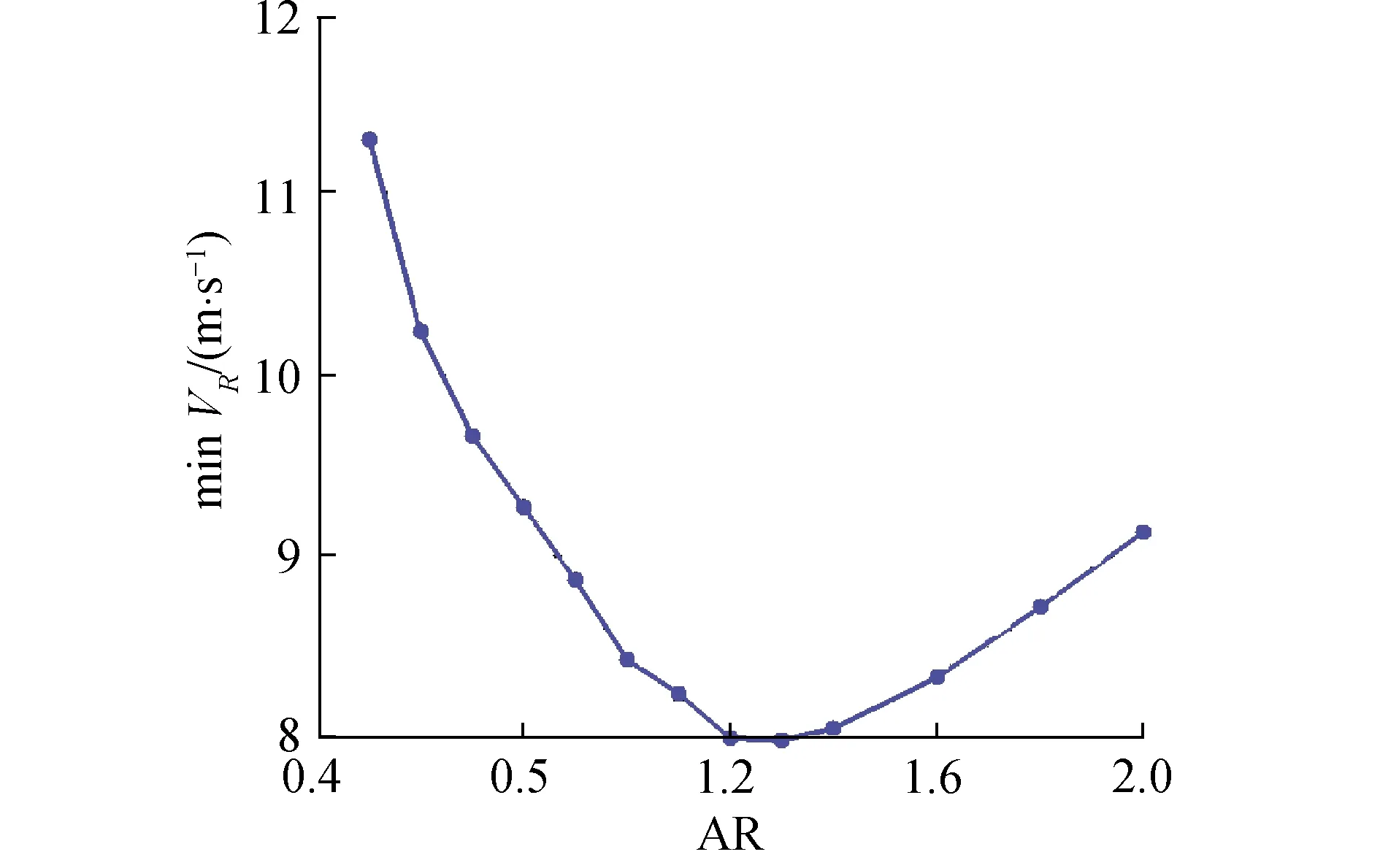
圖10 展弦比對動態滑翔能力的影響Fig.10 Influence of aspect ratio on dynamic soaring results
3.4 風場強度變化指數
除去飛行器自身總體參數,風場的形態對動態滑翔能力也有影響,風場強度變化指數p表征了不同地域環境條件下地表梯度風場的差異,主要由地面環境決定,其對動態滑翔能力的影響也應被納入研究之中。研究中的無人機總體參數和表1一致。
從圖11中可以看到,較大的風場強度變化指數p會使需求的最小風場代表速度降低,這主要是由于p的增大使得3~20 m的dVW/dh增大,有利于飛行器從風場中獲取能量,進而得到更強的動態滑翔能力。
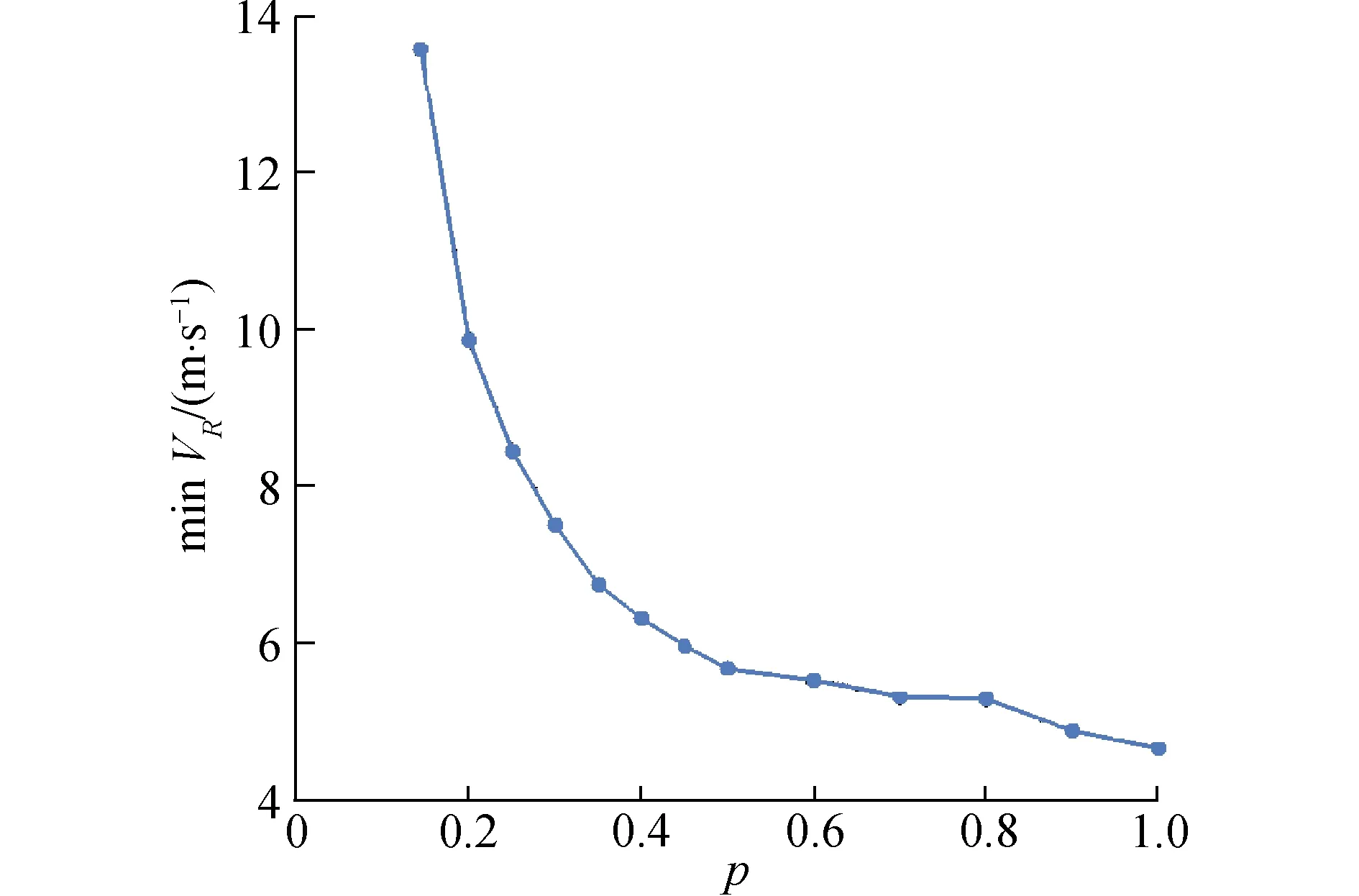
圖11 風場強度變化指數對動態滑翔能力的影響Fig.11 Influence of wind power law exponent on dynamic soaring results
4 結論
1) 基于信天翁三自由度動力學模型,改進了Runge-Kutta積分方法構建了動態滑翔航跡優化方法模型,并結合軌跡的遞推求解特點對該方法進行了進一步簡化,有效減少了所需考慮的變量及約束個數。對該方法進行了驗證,證明動態滑翔方法能夠有效減少飛行器機械能損失,同時該優化模型能夠為進一步研究飛行器的動態滑翔能力提供數據和方法的支持。
2) 利用改進型Runge-Kutta積分優化模型對飛行器部分總體參數對動態滑翔能力的影響進行了探究。通過對比不同總體參數下所需的最小風場代表速度來評估其對動態滑翔能力的影響。擁有較小重量、小翼載、足夠大的最大升力系數、合適的展弦比的飛行器具有更好的機動能力,而機動性能較強的飛行器在逆風爬升、順風俯沖及側風機動中更有優勢。這樣的飛行器具有更好的動態滑翔能力。同時,風場強度變化指數更大的風場能夠提供更大的側風梯度,對動態滑翔相對更加有利。
由于整個飛行過程中的能量變化較為復雜,而瞬時的能量變化公式不能反映整體情況,因此利用能量變化公式對總體參數與動態滑翔能力之間關系進行定性定量分析暫時較為困難,但可以作為今后的研究方向之一進行探索。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
發明與創新(2022年30期)2022-10-03 08:40:56
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
