基于邊緣計算的道路行程時間預測
2020-07-27 16:11:35黃相銘祝嘉輝祝富鍇高巖
軟件工程 2020年7期
黃相銘 祝嘉輝 祝富鍇 高巖
摘? 要:為了解決目前市面上的導航軟件無法針對用戶個性化預測的問題,本文提出了基于邊緣計算的道路行程時間預測的預測思想,并在之后就系統(tǒng)架構和預測過程進行了詳細論述。為了實現(xiàn)個性化預測,本文根據(jù)速度變化特征將用戶的行為模式分成了三類,并對每一類行為模式構建了對應的數(shù)據(jù)集。在基于用戶行為模式的預測算法方面,本文對每一類數(shù)據(jù)集分別應用了ELM模型和LSTM模型,通過對模型的預測表現(xiàn)進行對比確定了最優(yōu)模型,并將模型及其參數(shù)裝載到邊緣端。
最終,本文通過大量的實驗,將該研究所提供的時間預測和百度地圖提供的時間預測進行對比,驗證了本文研究內(nèi)容的可行性和準確性;以實例證明了本文設計并實現(xiàn)的道路行程時間預測原型系統(tǒng)的實用性和有效性。
關鍵詞:道路行程時間預測方法;邊緣計算;行為模式分類
中圖分類號:TP391? ? ?文獻標識碼:A
Abstract: This paper first proposes a framework of road travel time prediction based on edge computation, and then elaborates its system architecture and prediction process. The navigation software in current market does not make personalized prediction for users. In order to achieve personalized prediction, users' behavior patterns will be classified into three categories based on characteristics of driving speed changes. For each of these three categories, the corresponding data sets are collected. With regard to prediction algorithm based on users' behavior patterns, the optimal model is determined by comparing the prediction performance of ELM and LSTM models, which are trained with data sets separately. And then, the optimal model and its parameters are loaded to the ends of edge computing. Finally, a large number of experiments are conducted by comparing the time prediction presented in this research with that of Baidu Map so to verify the feasibility and accuracy of this framework. The prototype system of road travel time prediction designed and implemented in this paper is proved to be practical and effective with real cases.
Keywords: road travel time prediction method; edge computing; classification of behavior patterns
1? ?引言(Introduction)
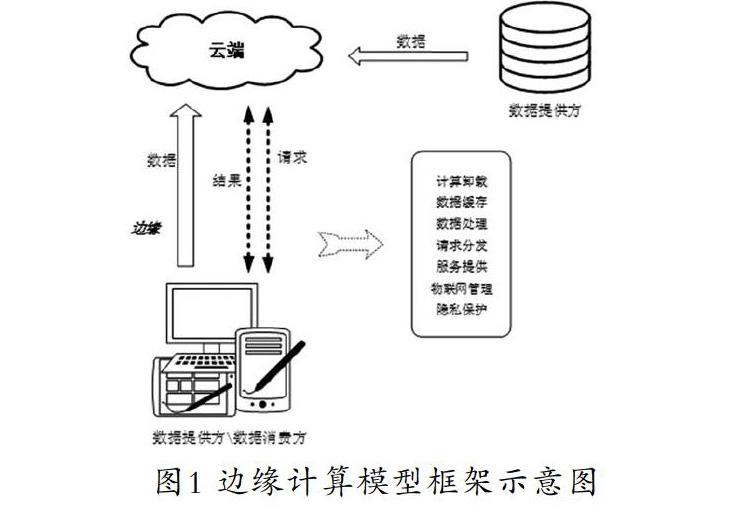
一直以來,城市道路交通所追求的是人、車、路的密切配合與和諧統(tǒng)一,因此盡可能地提高道路交通運行的效率、確保交通運行的安全度、提高能源的利用率并且改善環(huán)境成為人類的共同目標。一種能夠?qū)崿F(xiàn)準確、實時、高效率地對城市道路交通信息進行大范圍處理的智能交通系統(tǒng)便成了時代發(fā)展所需。邊緣計算指的是在網(wǎng)絡的邊緣來處理數(shù)據(jù),這樣能夠減少請求響應時間、提升電池續(xù)航能力、減少網(wǎng)絡帶寬同時保證數(shù)據(jù)的安全性和私密性[1-4]。邊緣計算模型框架示意圖如圖1所示。
相關研究表明,與云計算模型相比,邊緣計算的優(yōu)勢主要體現(xiàn)在幾個方面。
在文獻[5]的實驗中,研究人員將人臉識別的計算過程從云端移動到邊緣端,響應時間由900毫秒縮減到169毫秒。
在文獻[6]中,實驗人員在研究可穿戴的認知輔助設備時,將部分計算任務從云端卸載到邊緣端,整個系統(tǒng)對資源的消耗減少了30%—40%。
文獻[7]提出的Clone Cloud模型,將部分處理任務從云端轉(zhuǎn)移到邊緣端,使得數(shù)據(jù)在分區(qū)、遷移與合并等方面減少了20倍的時間。
綜上所述,邊緣計算模型更適合在移動邊緣端處理用戶所產(chǎn)生的數(shù)據(jù),低延遲和高效率更加契合了當今人們在快節(jié)奏時代的日常所需。對于本就強調(diào)實時性的“智慧交通”的分支——道路行程時間預測,邊緣計算無疑是一個與之最為匹配的計算模型。
2? 基于邊緣計算的道路行程時間預測框架(Framework of road travel time prediction based on edge computing)
2.1? ?預測過程及研究架構
預測過程主要分為兩大部分,即云端處理部分和邊緣端預測部分。本小節(jié)將分別闡述兩部分的運作過程。研究架構如圖2所示。
云端:我們將搜集到的不同行人的步行GPS數(shù)據(jù)在云端進行數(shù)據(jù)預處理,將經(jīng)緯度坐標值序列根據(jù)前述方法轉(zhuǎn)換為速度序列,去掉了無效數(shù)據(jù);其次基于用戶的速度變化情況,對不同行為模式進行了分析和分類,基于不同的速度變化方式來構建數(shù)據(jù)集;之后主要采用ELM模型和LSTM模型對不同的行為模式所對應的數(shù)據(jù)集進行訓練,通過調(diào)參和模型評判,得到了每種模式所對應的最優(yōu)速度預測模型,并保存下來,裝載到邊緣端。
邊緣端:用戶首先需要選定出發(fā)點和終點,一旦選定,路徑規(guī)劃將自動完成。用戶的初始道路總剩余時間將由冷啟動機制下的初始速度和路徑總長度計算得來。冷啟動過程中,邊緣端將實時接收用戶的GPS軌跡點,并根據(jù)前述方法計算用戶的實時速度。冷啟動結束后,邊緣端將基于之前搜集到的速度,判斷用戶的行為模式,調(diào)用預先訓練好的模型來預測下一階段的速度,再結合剩余路徑距離預測出剩余行程時間,從而實現(xiàn)基于邊緣計算的道路行程時間預測的實時周期更新。當發(fā)現(xiàn)用戶行為模式改變,邊緣端將調(diào)用與新模式對應的預測模型;當預測值和真實值有較大偏差時,邊緣端將做適當調(diào)整。
2.2? ?基于行為模式的速度預測方法
2.2.1? ?基于ELM模型的速度預測建模和預測過程
ELM預測模型整體需要輸入的數(shù)據(jù)為,
如果分段表示的話即為,其中表示整個訓練數(shù)據(jù)集的長度,表示步長。基于ELM模型的速度預測方法網(wǎng)絡圖如圖3所示,其中為輸入數(shù)據(jù),是輸入權重,為偏置,為輸出偏重,為要預測的速度,通過訓練得出輸入和輸出之間的關系,其中和可以隨機輸入。
根據(jù)圖3可知,基于ELM的速度預測方法的訓練過程包括以下幾個步驟:
輸入訓練集數(shù)據(jù)、選定激活函數(shù)和隱藏層節(jié)點個數(shù)。不同的激活函數(shù)可能會造成不同的預測結果,所以要選定激活函數(shù)。ELM模型中隱含層神經(jīng)元個數(shù)和預測步長均會影響ELM的預測效果,本文會通過大量的實驗來找到最優(yōu)的神經(jīng)元個數(shù)和預測步長。
隨機設置輸入權值和隱藏層節(jié)點偏置。在ELM模型的學習過程中,輸入權值矩陣和隱含層偏置矩陣是隨機生成的,這樣學習訓練的結果很快。
當ELM模型中所需要的預測步長、參數(shù)節(jié)點個數(shù)、輸入權值和均確定后即可根據(jù)訓練集進行訓練,首先計算出輸入矩陣的廣義逆矩陣。
計算ELM預測模型中隱含層到輸出層的輸出權值。將確定后,整個模型最終確定。因為輸入權值矩陣和隱含層偏置矩陣是隨機生成的,多試驗幾次,并且用測試集對其進行測試,計算預測誤差,選取最優(yōu)的預測模型。
將訓練模型用的輸入權值,隱藏節(jié)點偏置,隱藏層節(jié)點個數(shù),預測步長和隱藏層到輸出層的權值保存下來,以便以后進行預測使用。
2.2.2? ?基于LSTM模型的速度預測建模和預測過程
LSTM預測模型整體需要輸入的數(shù)據(jù)為,如果分段表示的話即為
,其中表示整個訓練數(shù)據(jù)集的長度,表示單詞輸入的數(shù)據(jù)維度。基于LSTM模型的速度預測方法網(wǎng)絡圖如圖4所示,其中為輸入數(shù)據(jù),為輸出結果,表示時序,代表輸入權重,代表輸出權重,代表上一個時刻的輸出值在下一次輸入之中的權重,是LSTM層與全連接層之間的權重。
根據(jù)圖4可知,基于LSTM的速度預測方法的訓練過程包括以下幾個步驟:
輸入訓練集數(shù)據(jù)、選定激活函數(shù)和隱藏層節(jié)點個數(shù)。不同的激活函數(shù)可能會造成不同的預測結果,LSTM模型中默認的激活函數(shù)是tanh函數(shù)。
LSTM模型中預測步長、層數(shù)、神經(jīng)元個數(shù)均會影響預測效果,本文會通過大量的實驗來找到最優(yōu)的參數(shù)選擇。
隨機設置權重值、、。在LSTM模型的學習過程中,權值矩陣、、的值均是隨機生成的,隱藏層神經(jīng)元的個數(shù)決定了初始化多少組參數(shù)矩陣,因此參數(shù)的設置至關重要。
當LSTM模型中所需要的預測步長,層數(shù),隱藏層神經(jīng)元個數(shù),輸入權重、、均確定后即可根據(jù)訓練集進行訓練,首先計算出輸入矩陣的廣義逆矩陣。
計算LSTM預測模型中全連接層到輸出層的輸出權值。將確定后,整個模型最終確定。因為權重值、、是隨機生成的,需進行多次實驗,選取最優(yōu)的預測模型。
將整個訓練模型及其權重參數(shù)以.h5的格式保存下來,以便將來進行預測和調(diào)整。
2.3? ?用戶行為模式的分類
我們的預測希望能夠為不同行人的不同行為模式提供更精確的個性化服務。因此,對行人的用戶行為模式規(guī)律性的挖掘具有必要性。本節(jié)將結合生活實際的經(jīng)驗,對用戶行為模式進行分類。由于在道路行程時間預測的問題中,對速度的預測是至關重要的一個環(huán)節(jié),因此我們對步行者的行為模式進行分類是基于用戶的速度特征。
根據(jù)我們收集到的用戶步行數(shù)據(jù)信息,我們發(fā)現(xiàn)均可以用三種基于速度變化特征的行為模式來描述用戶的整個步行過程。
2.3.1? ?用戶行為模式的分類
模式一:速度平穩(wěn)模式。
該步行模式下,行人的速度較為穩(wěn)定,其速度值并非完全與X軸水平,只是其Y軸上的波動較小。該種模式多出現(xiàn)在行人在某段路程的步行過程中途,因為行人已經(jīng)達到了由起步到加速,且對路況和目的地都有了一定的了解,因此會保持自己的一種最舒適的狀態(tài),不會輕易過分改變現(xiàn)有的速度。這一點與日常生活經(jīng)驗也是相吻合的。
模式二:速度勻變模式。
該步行模式下,行人的速度會改變,但是改變方式呈勻速變化,即其加速度穩(wěn)定在一定的區(qū)間內(nèi)。當時,步行者的速度呈勻速上升趨勢;當時,步行者的速度呈勻速下降趨勢,此兩種情況均可視為勻速變化模式。此種步行模式可能出現(xiàn)在行人跑步健身過程中,其速度在開始時由慢速逐漸加快,在臨近結束時又由快速勻速減慢;或者是行人在行走過程中心里想到了其他事務,速度會不自覺逐漸下降。這與日常生活經(jīng)驗也是相吻合的。
模式三:速度突變模式。
該步行模式下,行人的速度也會改變,但是改變方式并非呈勻速狀態(tài),而是劇烈突變,即其加速度并非穩(wěn)定在一定的區(qū)間內(nèi)。當時,步行者的速度會突然加快;當時,步行者的速度會突然減慢,此兩種情況均可視為速度突變模式。在生活中,這樣的速度變化方式是常見的,比如當一個行人在行進過程中突然發(fā)現(xiàn)前方有一位熟人,于是快速提速并趕上,之后和熟人談論,并一同慢速前行。在上述所描述的情境中,分別發(fā)生了速度突然變快和速度突然變慢的情況。這與生活實際經(jīng)驗相符,也同時印證了上一節(jié)所論述的行人步行過程的非均質(zhì)性和弱規(guī)則性。
上述的基于用戶速度變化的分類方式具有可行性和合理性,與實際生活經(jīng)驗相符,能夠合理刻畫出用戶的步行過程。
2.3.2? ?用戶行為模式的判別
在實際預測過程中,當用戶行為模式發(fā)生改變時,邊緣端需要更換對應的裝載好的模型去做預測。這就為我們判斷用戶行為模式的改變提出了要求。本文擬采用最小二乘法直線擬合方式來判斷用戶的行為模式。
在每次判斷用戶的行為模式是否發(fā)生改變之前,邊緣端會收集行人的個GPS軌跡數(shù)據(jù),并計算出速度值序列。簡便起見,不妨設此時得到個速度值分別為:,為了應用最小二乘法,我們將其轉(zhuǎn)換成坐標格式,即為:。
假設我們需要擬合的直線方程為,根據(jù)最小二乘法的原理,我們需要讓總的最小平方誤差盡可能小,的計算方法如公式(1)所示。
我們最終可以推導出直線方程的斜率的值如公式(2)所示。
在確定了直線公式后,我們再將帶入公式(1)計算出對應的,然后我們對和分別設置閾值和,并據(jù)此得出三類行為模式的判別方式。行為模式判別的流程圖如圖5所示。
在實際預測過程中,閾值和通過大量的實驗數(shù)據(jù)得來。本文研究中分別將上述兩個閾值設置為,。于是每當邊緣端收集到個GPS軌跡點計算出速度值序列之后,便依據(jù)上述方法判斷用戶所處的行為模式,之后調(diào)用對應的已裝載的模型對用戶接下來的速度做預測。
3? ?實驗與分析(Experiment and analysis)
3.1? ?實驗環(huán)境與數(shù)據(jù)
本文的實驗環(huán)境是安裝Windows 10操作系統(tǒng)的工作站,具體軟硬件配置如表1所示。
實驗數(shù)據(jù)是準確地驗證道路行程時間預測模型的關鍵,實驗數(shù)據(jù)對于實驗結果的客觀性、準確性、真實性的影響尤為重要。本文所使用的數(shù)據(jù)主要是通過發(fā)動周圍同學而得來,通過讓他們下載我們的APP,我們能夠收集到他們在校園內(nèi)步行時的GPS數(shù)據(jù)。當數(shù)據(jù)量不足時,我們使用數(shù)據(jù)擾動的方式圍繞已有數(shù)據(jù)上下波動生成足量數(shù)據(jù),以便后續(xù)實驗所需。單次的數(shù)據(jù)量大小約為8kB—38kB不等。GPS數(shù)據(jù)采集頻率,也即定位時間間隔為1秒。
在這些原始數(shù)據(jù)的基礎上,為了更好地實現(xiàn)用戶模式的個性化預測,本文根據(jù)用戶行為模式分類重新構建了新的數(shù)據(jù)集,用于對預測方法進行驗證。
3.2? ?評價標準
本文選取的評價指標有以下三種,這些客觀的統(tǒng)計學評價指標能夠較為準確地評價本文實驗的結果。
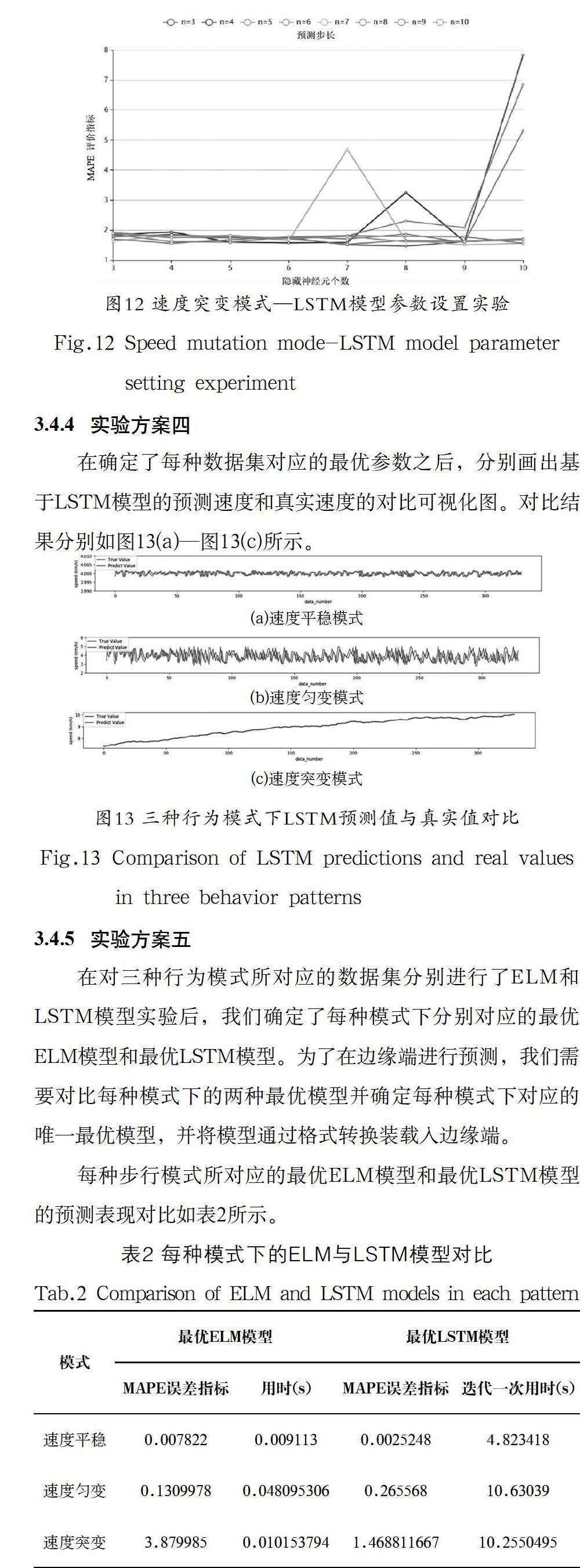
如表2所示,就速度平穩(wěn)模式而言,LSTM模型的預測MAPE誤差指標更小,表明其預測更為精確,但是其每次的迭代時間較長。雖然ELM模型的預測誤差MAPE較LSTM稍大,但仍在較好的可接受范圍內(nèi),因此對于速度平穩(wěn)模式,我們最終確定選用ELM模型。
就速度勻變模式而言,ELM模型無論是在MAPE誤差還是在用時方面都較LSTM模型更優(yōu),因此在該種模式下,我們選用ELM模型。
就速度變模式而言,雖然LSTM模型每迭代一次的時間較長,但是其MAPE誤差指標較ELM模型顯著更小,表明其預測值顯著更優(yōu)。因此在該種模式下,我們擬采用LSTM模型來做預測。
3.4.6? ?實驗方案六
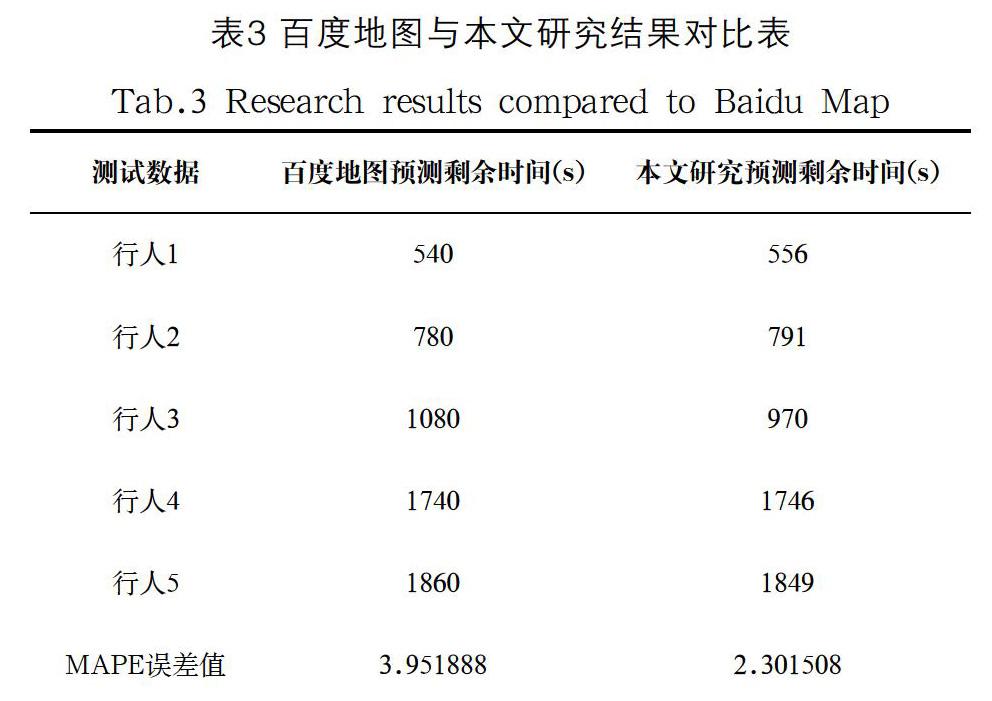
為了將本文研究模型與百度地圖預測模型進行對比,我們隨機選取了五位行人,記錄他們在行程的中間一半處時,百度地圖提供的道路剩余時間和本文模型預測的道路剩余時間;同時用秒表記錄下了他們實際行走后半程的用時。由于五位行人在行程中的行為模式不固定,因此作出的時間預測并不十分穩(wěn)定;此外,百度地圖的預測時間精度只能精確到分鐘,而本文研究內(nèi)容所提供的時間預測能夠精確到秒,這可能也是本文的預測結果更加精確的原因之一。具體的統(tǒng)計和對比結果如表3所示。
由表3可以看出,本文提出的基于邊緣計算的道路行程時間預測方法與百度地圖內(nèi)嵌的導航時間預測相比,本文提出的預測模型在實際行人道路行程中預測誤差更小,證明了該方法的可行性和準確性。
針對邊緣端APP的測試,首先對參數(shù)進行設置,然后對原始GPS軌跡數(shù)據(jù)進行處理,按照前文所述三種用戶行為模式類別分別構建數(shù)據(jù)集,處理結果保存在對應路徑下的文件內(nèi)。之后針對不同行為模式在云端對模型進行訓練,將選出的最優(yōu)模型利用tensorflow lite等工具轉(zhuǎn)換格式并裝載到邊緣端APP。
完成云端的數(shù)據(jù)和模型處理后,針對邊緣端Android APP進行測試,初始定位在東北大學渾南校區(qū)五舍,如圖14(a)所示;之后可以鍵盤輸入出發(fā)地點和目的地,也可在界面上觸屏點擊,如圖14(b)所示;系統(tǒng)以紅色標注提示目的地所在位置,如圖14(c)所示;路徑生成并顯示在APP上,然后界面下方會顯示當前路程剩余距離、當前路程剩余時間、當前速度和下一階段預測速度,如圖14(d)所示。
5? ?結論(Conclusion)
為了解決目前百度地圖的道路行程時間預測無法很好地針對步行用戶個性化的速度模式進行預測的問題,本文提出了一種基于邊緣計算的道路行程時間預測的框架,旨在根據(jù)用戶前一階段的速度值序列來預測該用戶在下一階段的速度,從而實現(xiàn)對于不同用戶的個性化預測。
在云端處理方面,明確了研究思路之后,本文首先對用戶的行為模式基于速度變化特征分成了三類,分別是:速度平穩(wěn)模式、速度勻變模式和速度突變模式;之后通過對GPS軌跡數(shù)據(jù)進行預處理,就每一類行為模式構建了對應的數(shù)據(jù)集。在具體的模型方面,本文對每一類數(shù)據(jù)集分別應用了ELM模型和LSTM模型,通過對模型的預測表現(xiàn)進行對比確定了最優(yōu)模型及其參數(shù)選擇。之后通過隨機選取的行人數(shù)據(jù),將本文研究所提供的時間預測和百度地圖所提供的時間預測進行對比,驗證了本文研究內(nèi)容的可行性和準確性。
在邊緣端部分,本文設計并實現(xiàn)了一個Android APP,在將云端預訓練好的模型裝載到APP中之后,系統(tǒng)會在判別用戶行為模式之后調(diào)用對應的模型對用戶速度進行預測。
此外,本文就用戶行為模式的判別和系統(tǒng)冷啟動處理等關鍵問題做了闡述,并給出了可行的解決方案。
參考文獻(References)
[1] Shi W, Fellow, IEEE, et al. Edge Computing: Vision and Challenges[J]. IEEE Internet of Things Journal, 2016, 3(5): 637-646.
[2] 施巍松,孫輝,曹杰,等.邊緣計算:萬物互聯(lián)時代新型計算模型[J].計算機研究與發(fā)展,2017,54(05):907-924.
[3] 李子姝,謝人超,孫禮,等.移動邊緣計算綜述[J].電信科學,2018,34(01):87-101.
[4] 施巍松,張星洲,王一帆,等.邊緣計算:現(xiàn)狀與展望[J].計算機研究與發(fā)展,2019,56(01):69-89.
[5] Yi S, Hao Z, Qin Z , et al. Fog computing: Platform and applications[C]. 2015 Third IEEE Workshop on Hot Topics in Web Systems and Technologies, 2015: 73-78.
[6] Ha K, Chen Z, Hu W, et al. Towards wearable cognitive assistance[C]. Proceedings of the 12th annual international conference on Mobile systems, applications, and services, 2014: 68-81.
[7] Chun B G, Ihm S, Maniatis P, et al. Clonecloud:elastic execution between mobile device and cloud[C]. Proceedings of the sixth conference on Computer systems, 2011: 301-314.