異構無人系統協同作戰關鍵技術綜述
2020-07-28 01:23:48郭繼峰鄭紅星
宇航學報 2020年6期
郭繼峰,鄭紅星,賈 濤,顏 鵬
(1. 哈爾濱工業大學航天學院,哈爾濱150001;2. 中國空氣動力研究與發展中心,綿陽621000)
0 引 言
近年來隨著以人工智能、芯片等技術為代表的科技革新與技術進步,無人系統在遠程、限制性環境中的自主行動能力得到了較大的提升[1]。無人系統的自主性提升直接降低了無人系統協同的整體系統復雜度與作戰人員操作負擔,因此無人系統協同受到了廣泛的關注,無人系統的應用向“自主化、協同化”發展的趨勢突出。
異構無人系統通常在功能或性能上可互相補充,從而高效的完成任務[2-3]。例如無人水面航行器與多個小型無人機進行協同信息采集任務[4],無人水面航行器為小型無人機提供了遠距離的航程,同時也作為通信基站與信息收集終端,為異構系統提供了遠距離、分布式的通信支持以及信息存儲空間。小型無人機則使異構無人系統具備了快速、靈活的信息收集方式。異構無人系統因其在執行復雜任務中的突出優勢,目前已受到廣泛關注。
2017年1月,美國國防高級研究計劃局(Defense advanced research projects agency,DARPA)提出了進攻性蜂群使能戰術(Offensive swarm-enabled tactics,OFFSET)項目[5],項目計劃實現一個步兵部隊控制250多個無人機與無人地面系統組成的異構無人系統在存在著高大建筑、機動、通信受限的城市作戰環境中進行協同作戰。
2017年12月DARPA發布了地下挑戰賽(Subterranean Challenge)[6],又被稱為“Sub-T”挑戰賽,挑戰賽設置了隧道、地下設施與網絡化洞穴三條賽道,參賽團隊需要在賽道內執行搜索、檢測等一系列任務。參賽隊伍大多通過異構無人系統的協同作為比賽的解決方案。內華達大學、加州大學伯克利分校構建的CERBERUS系統[7]由四足無人系統、輪式無人系統與多架微小型無人機組成,該系統配備了多模態感知系統、以及自組織網絡通信,能夠在地下環境中實現可靠的導航、地圖繪制和目標搜索。CoSTAR團隊的成員包括美國宇航局噴氣推進實驗室、麻省理工學院等機構,團隊提出的“異構協作式彈性地下自主無人系統”[8]涵蓋飛行、滾動、彈跳的多模態移動方式,用于極端復雜地形下的有效機動。其同樣在分布式協同規劃、抗干擾網狀通信、魯棒定位等方面進行了重點探索。
我國目前也在積極開展無人系統自主協同技術的相關研究工作,空軍裝備部主辦的“無人爭鋒”挑戰賽以無人機集群的智能自主協同為考察重點,包括據止環境下的編隊穿越、無人系統協同感知與分布式融合等科目,目的是牽引該領域的發展方向與成果轉化應用。中國電子科技集團完成了200架固定翼無人機的編隊飛行試驗,成功測試包括無人機編隊密集起飛、空中編隊等多種關鍵技術。現目前關于無人系統自主協同的研究大多針對同構無人系統,對于異構系統協同的研究較少。
本文首先將基于異構無人系統的規模與異構性強弱對異構無人系統進行分類,并以異構無人系統班組在城市環境中的作戰任務為牽引,梳理異構無人系統協同作戰中面臨的挑戰,隨后將從異構無人系統協同控制架構設計、異構無人系統協同任務規劃與決策等方面闡述異構無人系統協同作戰中的主要關鍵技術,最后總結異構無人系統協同作戰的進展與挑戰。
1 異構無人系統協同作戰問題的牽引與分析
1.1 異構無人系統的分類
異構無人系統協同的難度與其數量以及種類密切相關,異構無人系統協同按照規模可以分為大規模異構無人系統與中小規模異構無人系統。
大規模異構無人系統中異構無人系統的數量范圍在數十乃至成百上千之間,大規模異構無人系統中,異構無人系統種類的提升將造成系統的指揮操作、控制、通信的難度呈現指數級別的上升,因此其系統內的無人系統種類較少,其本質上更趨向于同構的無人系統。中小規模異構無人系統中的無人系統數量較少,數量上的降低使更多種類的異構無人系統協同成為可能。在戰場環境中可以通過較多種類異構無人系統組成班組、聯隊等形態出現,側重能力上的互補以執行高度復雜的任務,其異構性較強。鑒于大規模異構無人系統在本質上更趨近于同構無人系統協同,因此從中小規模異構無人系統的協同角度進行問題的牽引與分析。
1.2 異構無人系統班組與協同作戰關鍵問題分析
1.2.1異構無人系統班組的概念與城市作戰應用設想
異構無人系統班組是由多種異構無人系統組成的中小規模協同編組,系統通過異構資源的互補應對復雜不確定環境,實現對抗環境下的靈活戰術運用。城市作戰是異構無人系統協同作戰的一個重要的典型場景[9],城市地形復雜存在高大建筑、地下管網、隧道等特殊環境,常規裝備應用困難,遠距離、大規模火力會造成非戰斗人員大量傷亡,不適合在城市地區使用,大范圍偵察系統受到對抗性環境、建筑物遮擋等不利因素影響,功能及效用不易發揮。通過異構無人系統班組進行城市作戰是解決上述問題的有效手段。以城市作戰環境中的異構無人系統班組為例,其可由若干個操作人員、四足無人系統、小型旋翼機、小型爬行無人系統以及微小型無人系統組成。其中
1)四足無人系統:具備較大的負載,裝備有視覺、激光雷達、聲音等傳感器,具備較為完備的感知系統,可搭載其他無人系統在復雜地形快速移動,并且通信能力強,可作為通信網絡的維持節點;
2)小型爬行無人系統裝備有紅外熱成像儀、超聲波傳感器,具備一定距離的通信與中繼能力,可以用于管道等狹小區域的探測以及潛入偵察;
3)小型旋翼機裝載有視覺、激光雷達、超聲波傳感器,具備一定距離的通信與中繼能力,用于環境的感知、快速偵察與監視;
4)微小型無人系統不具備移動能力,搭載振動與聲音傳感器,可以擔任通信中繼節點并對環境中的異常信號進行監測,執行固定區域的值守任務。
如圖1所示樓宇搜索與值守任務是異構無人系統班組在城市作戰中的典型應用場景,小型旋翼無人機負責建筑外部環境的監視,微小型爬行無人系統執行上樓與目標檢測任務,四足無人系統提供近距離的火力支持,在確認樓宇安全后,在隱蔽位置布置微小型無人系統實現對樓宇環境的值守監視。

圖1 樓宇搜索與值守任務Fig.1 Building search and duty tasks
1.2.2城市環境中異構無人系統協同作戰面臨的挑戰及解決思路
城市環境中異構無人系統協同作戰同樣面臨許多挑戰,異構無人系統異構性在帶來系統能力提升的同時同樣對異構無人系統協同控制架構設計、異構協同規劃決策等技術上帶來了挑戰,異構無人系統關鍵技術與問題的關聯矩陣如圖2所示,作為典型作戰場景的城市作戰因其環境因素、對抗條件對異構無人系統的設計提出了具有實際意義的約束。因此,在解決異構無人系統協同作戰問題時應充分考慮其對于技術層面的影響,針對異構無人系統協同作戰的主要技術問題,提出如下解決思路:
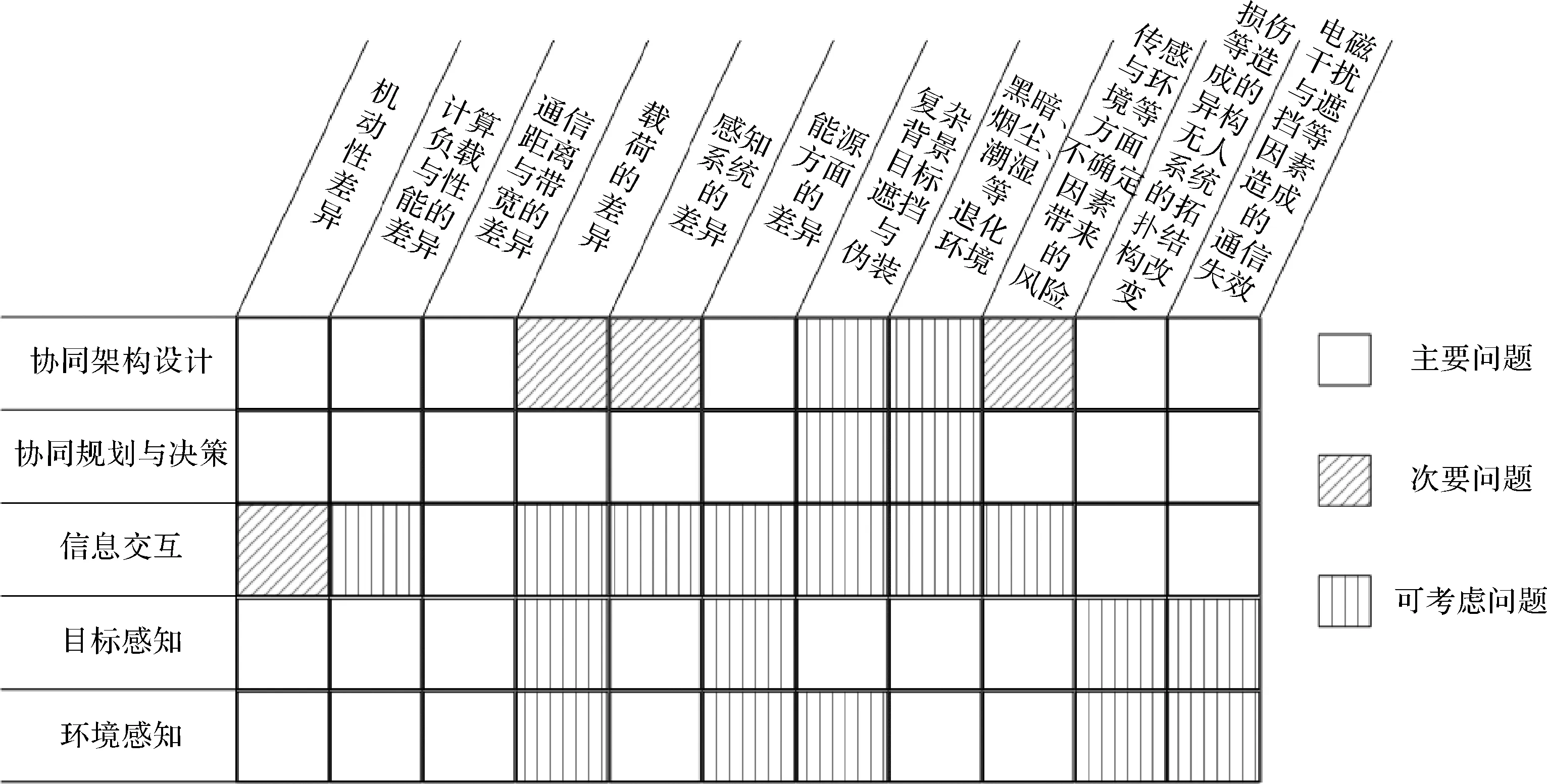
圖2 異構無人系統關鍵技術與問題的關聯矩陣Fig.2 Correlation matrix of key technologies and problems in heterogeneous unmanned system
1)構建以兼顧“異構性、對抗性、自組織性”為中心的異構無人系統協同控制架構。異構無人系統的能力差異,以及對對抗環境的適應性與自組織性直接影響整體系統的穩定性與有效性,因此,架構設計以異構性、對抗性以及動態自組織性為中心;
2)攻關以異構資源協調以及不確定環境推理為重點的協同規劃與決策技術。異構無人系統間的計算負載不均衡、計算速度差異性較大,使得系統一致性行為獲取難度增大。同時戰場環境中的不確定因素較多,導致異構無人系統對于環境的判斷可能存在較大差異,不利于一致行為的達成。應合理協調人與無人系統之間的協同關系。因此應以異構資源協調以及不確定環境推理為重點;
3)重點研究以自組織通信鏈路與無鏈路的自然交互手段相結合的智能交互技術。異構無人系統受到高大建筑、封閉室內環境的遮擋以及電磁干擾等方面的影響,通信鏈路的穩定性容易受到影響,在提高通信鏈路帶寬、距離、穩定性、自組織性的同時,應考慮通過特殊動作、行為等間接的自然交互方式,實現無人系統之間以及人與無人系統之間的高效通信交互;
4)聚焦適應復雜背景、欺騙式偽裝、遮擋等不利因素的目標感知技術。城市戰場環境中存在大量、多樣的復雜背景、光學特征以及遮擋造成的特征缺失,使得無人系統對目標的檢測與穩定跟蹤比較困難,應針對遮擋、復雜背景分割、動態目標跟蹤等難點問題進行重點考慮;
5)著眼于黑暗、煙塵等傳感退化環境下的魯棒感知技術。城市戰場環境,尤其是地下環境中存在著黑暗、煙塵、潮濕等諸多不利因素,容易造成傳感器的失效與傳感器的退化,導致無人系統喪失有效的環境感知能力,因此應考慮多模傳感器協同的復合感知手段,提升退化環境下的感知魯棒性。
2 關鍵技術
2.1 異構無人系統的協同控制架構設計
異構無人系統的協同控制架構是設計異構無人系統的最基本問題,集中式控制架構、分布式控制架構、有限集中式控制架構是三種最為典型的架構[10]。設計合理的協同控制架構是解決異構無人系統中計算負載分配不均衡[11]、通信鏈路穩定以及無人系統行為控制等問題的關鍵。
集中式控制架構中存在中央控制單元,異構無人系統的感知、狀態等信息向上匯集到中央控制單元,中央控制單元依據全局化的信息進行統一的行為規劃[12]。集中式控制架構的優點在于:1)協同控制依據的信息完整;2)行為完全預測與受控。其缺點也較為明顯:1)對中央控制單元的狀態敏感;2)節點數量的增加會造成整體系統協調的性能下降;3)對通信的依賴性強;4)中央控制單元的計算負擔較重;5)節點對于環境變化的反應速度較慢。
分布式控制架構采用分散的通信與控制形式,系統中并不存在中央控制單元,節點依據相互間的信息交互進行行為的控制[13]。分布式控制架構的優點在于:1)其降低了系統對于某一單個節點存續的依賴;2)充分地利用了各節點計算能力;3)對通信的依賴性較弱;4)節點對于環境的反應速度較快;5)節點數量的增加不會造成整體系統性能的明顯下降。分布式控制架構的缺點在于:1)難以獲得周圍環境的完整信息;2)異構無人系統的個體行為受控性弱、難以預測;3)可能由于信息的不一致造成節點沖突。
有限集中式控制架構并不是一種嚴格的集中式或者分布式協同控制架構[14],系統中央控制單元可能存在多個,異構無人系統節點并不將所有信息反饋給中央控制節點,而是反饋重要的或者中央控制單元訂制的有限信息。中央控制單元更多的作用是監督與協調,而非全局式的控制,其是集中式控制架構與分布式控制架構的一種平衡,意圖在較為全面的協調無人系統的同時,來降低通信、計算等負擔。
2.2 異構無人系統協同任務規劃與決策
異構無人系統的協同任務規劃與決策問題要在優化總體目標、滿足任務相關約束與異構無人系統能力以及功能等方面約束的前提下,實現人與異構無人系統間任務的合理分配以及異構無人系統的行為規劃,獲得高效可靠實現任務的解決方案。其本質上可以視作最優決策或動態決策問題。對應于異構無人系統的協同控制架構其也可以分為集中式與分布式協同任務規劃與決策兩種類型。
2.2.1集中式任務規劃與決策
最優的集中式解決方案很難獲得,因為它們需要評估大量候選解決方案以保證最優化。目前解決集中式任務規劃問題的主要方法集中在精確式與啟發式方法[15]。精確式方法在處理較小規模問題時可以獲得最優的解,但是其計算復雜度受問題規模的影響較為嚴重。啟發式方法目的是在可接受的計算時間內獲得問題的次優解。
1)精確式求解方法
文獻[16]提出一種有界的最優規劃方法以解決存在優先級、同步等時序約束情況下的多無人系統任務規劃問題。文獻[17]提出了一種同時選擇異構無人機裝載的傳感器與路線的問題模型,并通過列生成方法有效的解決了此問題。文獻[18]針對團隊定向問題提出了一種分支定界算法,算法允許解決100個任務目標的實例。文獻[19]提出一種分支-定價-切割算法用于解決具有時間窗約束的異構車輛路線規劃問題。文獻[20]提出了一種基于凸優化理論的有人/無人機協同系統的航跡規劃方法,分別基于有人機與無人機的任務特點設計了航跡規劃器與編隊規劃器,對兩規劃器模型進行近似與凸化,并利用凸優化算法進行求解。
2)啟發式方法
啟發式方法不能提供理論上的保證,但是通過大量的實驗證明了其有效性。文獻[21]通過對異構無人機協同任務規劃問題的分析,將權重策略與多目標進化算法相結合,引導初始解的分布以解決大規模問題難以收斂的問題。文獻[22]利用遺傳算法對異構無人機的偵察、打擊、驗證一體化任務問題進行了算法設計,并基于兩階段隨機規劃模型解決了隨機速度擾動時解的穩定性問題。文獻[23]提出了一種啟發式任務分配與全排列序列規劃方法,實驗結果表明,該算法能有效地解決規模較大的問題。文獻[24]重點研究了城市環境下異構無人系統協同運輸的任務調度與路徑規劃問題。
2.2.2分布式任務規劃與決策
分布式規劃方法通過分別部署于各異構無人系統中,團隊中的節點全部參與計算,通過信息的交互,實現一個統一的目標。分布式規劃方法中分布式約束優化和基于市場協商的方法是兩種主流方法。
1)基于分布式約束的方法
異構無人系統的協同任務規劃問題可以被建模為分布式約束優化問題[25],精確求解分布式約束優化問題是NP-hard的[26],因此max-sum等近似求解方法得到了廣泛的關注。文獻[27]將無人機分隊協同收集災難現場實時航空圖像問題構建成分布式約束優化問題,并使用完全異步和分散的max-sum算法進行求解。文獻[28]重點關注在重大災害時,來自多個機構的多個異構人系統組成團隊來協同處理災害任務問題,其將它作為分布式約束最優化問題來進行建模并通過max-sum算法來解決。文獻[29]針對任務及無人系統存續狀態動態變化的問題,提出了一種結合分支定界的快速max-sum方法以加快規劃的速度。
2)基于市場協商的方法
在分布式任務規劃算法中,基于市場協商的方法相較于其他方法更為受到關注。基于市場協商的方法需要通信來共享出價和結果,一致性捆綁算法可有效減少通信需求。文獻[30]基于擴展的一致性捆綁算法(CBBA)來求解動態環境中異構無人系統協同問題,擴展算法在保持原算法魯棒收斂性的同時,對任務的有效時間窗、燃料成本和無人系統能力的異質性都做出了適當的處理。文獻[31]提出了一種集群自組織的方法,該方法既不依賴于全局知識,甚至它不需要無人系統進行通信。
2.3 智能交互技術
2.3.1無人系統之間的交互技術
異構無人系統之間的團隊成員可以基于兩種方式進行交互。一種是通過通信鏈路進行直接的信息交互[32],第二種則是通過線索來進行間接的信息交互[33]。也就是說一個無人系統通過觀察另一個無人系統的線索來進行交互,線索可以通過約定特殊的動作、標記或者推斷而獲得。在無法保持穩定、頻繁的通信時,基于線索的交互方式是一種有效的補充方式,可提升交互的魯棒性。
文獻[34]在無先驗的環境信息以及通信鏈路的條件下,通過基于線索的交互方式實現了多無人系統的區域覆蓋任務,并驗證了算法的魯棒性。文獻[35]提出了一種基于生物的協同策略,無人系統可以通過在重要位置上進行標記以縮短路徑長度。文獻[36]研究了類似于飛行動作、蜜蜂的搖擺等運動信號作為傳遞信息的手段,在確定性協議框架下,實現了無人系統間的高效交互。文獻[37]研究了由兩個子群組成的異構無人系統群在室內環境下自組織協同導航的問題,實現僅基于線索的指令交互與導航。文獻[38]研究了基于線索的交互方式在極端簡單化的無人系統中的應用,其使用多個ePuck機器人以及一個帶有1500個嵌入式射頻識別標簽的地板作為線索介質,成功的完成了全局最優的導航地圖的建立。
2.3.2人與異構無人系統之間的交互技術
人在與異構無人系統之間的交互中承擔著監督與控制的任務,并扮演著不同的角色,主要包括:任務計劃、教學、監控、干預和學習。文獻[39]將這些角色按順序描述為:1)在任務開始之前對任務計劃的制定;2)以特定的方式指導計算機執行特定的任務;3)監視無人系統以確保任務的正確執行;4)必要時干預調整無人系統的自主運行;5)從觀察與交互中學習,以改善交互手段或計劃的制定。
文獻[40]考慮了在軍事行動中人與無人車輛之間的接口類型與交互方案,以增強操作員監督多個無人車輛的能力。文獻[41]提出一種稱作“Flying Frustum”的三維空間接口,它可以在地形的物理模型上使用筆交互來控制半自主無人飛行器,并將信息流定位到物理模型上。文獻[42]在無人機飛行路徑生成中使用手勢與語音兩種自然語言交互接口,并與鼠標等傳統交互方式進行了對比,分析表明自然語言接口是傳統接口的良好替代品。文獻[43]利用加速度計和陀螺儀對手勢指令進行感知,然后利用logistic回歸模型對手勢指令進行分類。結果表明,該系統可以作為一個自然界面,幫助操作者指導無人飛行器的行為。
2.4 目標感知技術
目標感知技術是異構無人系統協同作戰的關鍵環節,是異構無人系統理解環境并對目標進行控制與影響的前提,目標感知技術涵蓋目標檢測、目標跟蹤、目標識別、目標行為理解與分析等內容,其中目標檢測與跟蹤是進行識別、行為理解與分析的基礎,并且在有人參與且計算資源限制的情況下,異構無人系統可以通過數據的壓縮傳輸將目標識別、行為理解與分析等中高層任務交由人來完成。因此重點從目標檢測與目標跟蹤兩部分進行展開。
2.4.1目標檢測
目標檢測的目標是將復雜背景進行分割,去除無關的信息,提取任務相關的前景目標,實現準確的目標分類與定位,按照處理手段的不同其可以被分為基于背景建模與前景建模的目標檢測方法。
1)基于背景建模的目標檢測方法
基于背景建模的目標檢測方法通過同一無人系統采集的不同時間的背景信息或來自其他無人系統采集的同一時間段的背景信息,通過對比差分,提取前景信息。文獻[44]針對復雜環境下前景目標檢測的背景建模問題。提出了一種結合光譜、空間和時間特征來描述背景外觀的貝葉斯框架與基于學習的方法來適應漸變和突變的背景變化。文獻[45]針對動態背景、光照變化、偽裝等復雜場景中的運動目標檢測問題,提出了一種具備魯棒性的背景減法技術,減少了動態背景、光照變化以及偽裝等因素對結果的影響。
2)基于前景目標建模的目標檢測方法
基于前景目標建模的目標檢測方法,其可以分為兩個階段,即離線訓練與在線檢測。相較于基于背景建模的目標檢測方法對環境的適應能力更強,通過合理的特征選取以及分類器設計,可以取得較好的目標檢測效果。文獻[46]提出了空間失配核方法,使其可以捕獲圖像中視覺關鍵字之間的空間依賴關系。文獻[47]提出了一種基于卷積神經網絡的三維點云目標檢測方法,其在KITTI基準上證明了方法的有效性,并且表明在基于激光和視覺的方法中,三層以下的Vote3Deep模型的性能突出。文獻[48]提出了一種基于域適應Faster RCNN的復雜背景目標檢測方法,實驗結果表明與經典的Faster RCNN相比,模型的檢測精度得到整體性的提升,并且提升了對小樣本數據集與低質量圖像的檢測精度。
2.4.2目標跟蹤
目標跟蹤是基于初始時間序列中的目標的大小、顏色、紋理、位置、速度等信息,對后續時間序列中該目標的特征進行匹配,實現目標大小、位置等特征的預測。其主要難點在于解決環境的變化、遮擋、快速運動、尺度變化等因素對于目標跟蹤的影響。按照處理過程的不同,可以分為生成式跟蹤方法與判別式跟蹤方法兩種。
1)生成式目標跟蹤方法
生成式目標跟蹤方法基于當前圖像與目標的相似度匹配劃定跟蹤區域,不對背景信息與目標信息進行分類,在目標被遮擋或發生變化的情況或目標運動較快的情況中容易產生目標的丟失。文獻[49]提出了一種結合紋理和顏色特征的自適應mean shift算法,克服被跟蹤對象對雜波干擾、光照變化以及背景的影響敏感的問題。文獻[50]在跟蹤算法中加入加權背景信息以增強方法的魯棒性。
2)判別式目標跟蹤方法
判別式目標跟蹤方法將目標跟蹤視作一個二分類問題,基于目標與背景環境的特征對圖像進行分類,以深度學習等方法進行分類器的訓練,由于其同時考慮了背景與目標的雙重信息,其效果一般較好。文獻[51]提出了一種適合于有效地進行廣義Hough變換的隨機森林方法,提高了廣義Hough變換在目標檢測中的跟蹤性能。文獻[52]等通過使用完全概率相關向量機生成滿足高斯分布的觀測值來直接估計目標區域的位移。文獻[53]提出了一種用于飛機跟蹤的快速深度學習跟蹤網絡,并通過遷移學習來彌補飛機目標跟蹤中的樣本量較小的問題。
2.5 環境感知技術
環境感知技術是無人系統與外界環境進行自主交互的關鍵,其內涵是指無人系統依靠自身裝載的傳感器實現對周圍環境與自身狀態的感知。重點討論地形感知、語義建圖兩個關鍵環節。
2.5.1地形感知
無人系統基于視覺、激光雷達、超聲波等外部傳感單元提取周圍環境的特征信息,可以為無人系統提供環境中障礙距離、角度、尺度等直觀感知信息,同時可基于IMU、氣壓計等內部傳感單元實現對自身狀態的感知,進而獲取較為全面的直觀環境信息。然而在城市、地外行星等復雜環境中僅僅依靠障礙距離、角度、尺度等直觀信息無法保證無人系統的安全導航,例如外觀平整的地面,可能由于松軟、泥濘等因素導致無人系統無法通信,因此有必要對地形進行精確的感知,地形感知可主要分為地形分類與地形重構兩方面。
1)地形分類
哈爾濱工業大學航天學院針對基于視覺或激光雷達的環境感知技術無法完全的預測地形的可穿越性及缺少對地形的軟硬程度等物理特性的判斷的問題,提出了一種基于輪地相互作用引起的車輛結構三維振動的地形分類方法[54]:首先通過無人車的慣性測量單元獲取不同地形下無人車測得的加速度信息。然后,學習已知地形的振動特征,移動實驗平臺與傳感器布置方式如圖3所示,利用快速傅里葉變換將標記的三軸振動矢量變換為頻域,然后通過歸一化得到訓練特征向量,采用改進的BP神經網絡,得到振動與地形類型之間的映射關系。最后,對混凝土、草地、砂、礫石和混合料五種環境進行了分類試驗。經過20次隨機測試實驗,分類精度在88.99%~100%范圍內,實現了無人車行進過程中對地形的分類及軟硬程度的判斷。
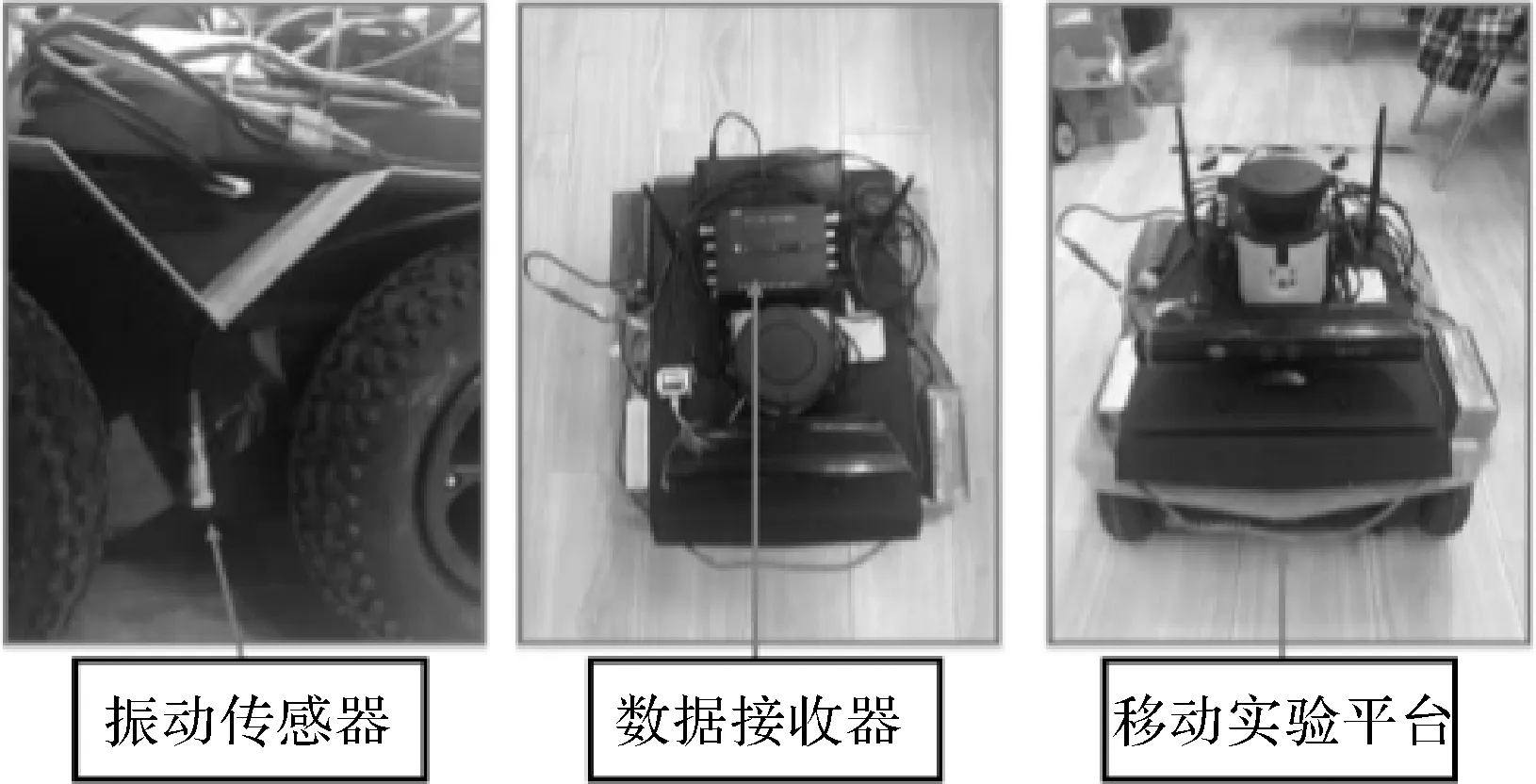
圖3 Jackal移動實驗平臺與傳感器布置Fig.3 Jackal mobile experiment platform and sensor layout
2)地形重構
地形重構問題在無人系統領域被廣泛關注。文獻[55]提出了一種利用低空立體視覺圖像序列建立高分辨率地形高程圖的方法。文獻[56]針對行星漫游器地形相關導航中的地形匹配問題,提出一套三維地形特征提取匹配方法,仿真結果表明,對于激光雷達獲取的三維地形數據,方法在特征重復檢出率和正確匹配率方面性能較好。文獻[57]提出了一種利用移動機器人和激光測距儀生成城市環境緊湊三維地圖的方法。
哈爾濱工業大學航天學院針對基于視覺和激光雷達的地形測量受到強烈光照和沙塵暴等環境影響的問題,提出了一種振動/陀螺耦合地形估計方法[58],通過對測量不確定度和運動不確定度的分析,推導出地形更新模型,并進行了仿真與實物測試,室外地形重構結果如圖4所示,表明基于振動/陀螺耦合的地形估計方法可以有效的重構地形紋理。
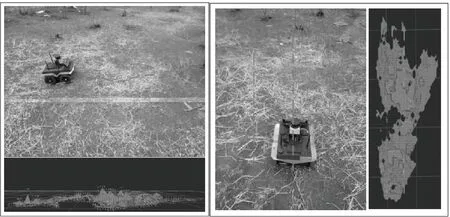
圖4 室外地形重構結果Fig.4 Results of outdoor terrain construction
2.5.2語義建圖
同步定位與建圖技術也被稱為SLAM技術,實現了傳感信息向物理環境空間模型的轉換,并通過環境特征實現了自身位姿的同步估計,語義建圖是在幾何與外形地圖的基礎上進行語義的分割,獲得環境中障礙類別等更為高層的環境信息,實現更為豐富的環境理解。
文獻[59]提出了一種新的基于區域的目標檢測器設計方案,它能有效地整合來自掃描窗口局部模型和全局外觀提供的信息,對人或其他具備關節動物的語義分割中獲得了很好的性能。哈爾濱工業大學航天學院針對退化環境中視覺傳感器可能受到功能限制的問題,提出了基于視覺/觸覺融合的語義地圖構建方法,語義融合實現框架如圖5所示,主要由三部分來實現語義的融合,分別為基于視覺的語義建圖、基于振動觸覺的地形分類以及兩者的融合,該方法使無人系統即使在視覺失效的情況下,通過振動觸覺依然可以提供有限范圍內的地形認知精度。
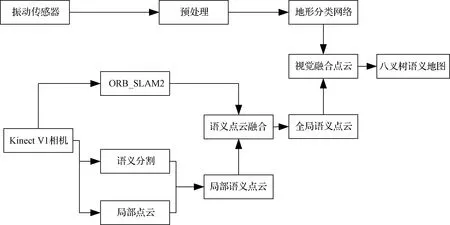
圖5 語義融合實現框架Fig.5 The framework of semantic fusion
3 進展與挑戰
異構無人系統通過系統間功能、性能的差異互補,可以執行由單一或同構無人系統難以執行的復雜任務。協同控制架構設計、協同任務規劃與決策技術、智能交互技術、目標感知技術、環境感知技術作為異構無人系統協同作戰的關鍵技術,在自主無人系統、多機器人系統、無人機蜂群系統等多個相關技術領域受到了廣泛的研究與關注。在此基礎之上,異構無人系統協同作戰對其提出了新的技術需求。結合異構無人系統協同作戰的技術需求與相關關鍵技術的研究現狀,對異構無人系統的相關技術進展與面臨的挑戰進行如下總結:
1)協同控制架構設計方面,協同控制架構設計是多機器人系統、無人機蜂群系統、異構無人系統等存在多平臺協同的復雜系統需要解決的共性問題。雖然集中式控制架構、分布式控制架構、有限集中式控制架構等典型架構已被提出,但研究偏重理論層面,實際應用中涉及的相關問題并未深入結合。異構無人系統協同控制架構的設計在其基礎上更應關注系統魯棒性、計算效率與負載均衡、整體性能優化等更為具體的實際問題。
2)協同任務規劃與決策方面,對于異構無人系統協同作戰,其面臨的環境存在高度的不確定性,傳感器噪聲、硬件損傷、通信干擾等因素都會對系統的整體性能造成影響,目前相關研究對于不確定、對抗環境下的協同任務規劃與決策研究有待深入,通過不確定性推理、智能學習等手段使異構無人系統具備不確定條件下的高度自主性與靈活性將是一個具有挑戰性的問題。
3)智能交互方面,人與無人系統以及無人系統之間的交互方式有直接交互與間接交互兩種。通過通信設備直接進行系統交互已經得到了諸多學者的廣泛的研究與關注。通過約定動作、標記等基于線索推斷的間接交互目前研究相對薄弱,目前缺乏基本理論的支撐。間接交互在遠距離交互、通信干擾等直接交互受限環境下可以作為系統交互的有效支撐,其基本理論、系統設計等方面存在廣闊的研究前景與技術挑戰。
4)目標感知方面,目標檢測與跟蹤是異構無人系統實施對環境與目標干預的前提,目前相關研究往往針對特定場景下、特定目標的檢測與跟蹤,對于開放式、自然環境下的普適性目標檢測與跟蹤研究較為薄弱,開展開放式、自然環境下的非特定目標檢測與跟蹤具有較為突出的實際意義。
5)環境感知方面,基于視覺、激光雷達、GPS等傳感器的無人系統環境感知是目前的研究熱點,其相關理論與技術受關注度較高。考慮異構無人系統協同作戰所處的復雜環境存在煙塵、黑暗、潮濕等退化條件,將嚴重影響傳感器的性能,開展結合非常規傳感器的退化環境感知問題研究,可以作為環境感知的有效支撐,有助于提升復雜環境下的感知魯棒性。
總體來說,異構無人系統協同作戰相關技術在取得一定成果的同時也存在著許多問題,需要進一步的研究完善。
4 結 論
本文以異構無人系統班組城市作戰為牽引,提出了異構無人系統架構設計、異構無人系統協同規劃與決策、通信交互、目標感知、環境感知等關鍵技術,同時指出應重點考慮異構無人系統的機動方式、機動性能、通信能力、計算能力等異構性,以及其作戰環境中的目標遮擋、黑暗、煙塵、通信間斷等不確定性、對抗性對異構無人系統的影響。針對上述關鍵技術的研究現狀與特點進行了闡述,最后明確了異構無人系統協同作戰的進展與挑戰。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34