仿生導航技術綜述
2020-07-29 01:45:38胡小平張禮廉何曉峰韓國良
導航定位與授時 2020年4期
胡小平,毛 軍,范 晨,張禮廉,何曉峰,韓國良,范 穎
(國防科技大學智能科學學院,長沙 410073)
0 引言
以衛星導航系統為核心的導航定位與授時體系在國防和國民經濟發展中發揮著不可或缺的支撐作用。眾所周知,衛星導航信號易受干擾,過分地依賴衛星導航在戰時將面臨巨大的風險。因此,如何提升各類運動體在衛星導航信號拒止環境下的自主導航能力,是目前導航領域面臨的重大挑戰。近年來,仿生導航、視覺/慣性組合導航、全源導航等多種新型自主導航技術逐漸成為研究熱點,以期為解決目前導航領域面臨的相關難題提供新的技術途徑。
仿生導航是一項多學科交叉融合的新型自主導航技術。動物行為學和生理學的研究成果以及人工智能、微納米制造、高性能芯片、計算機視覺等相關技術的發展為研究仿生導航技術提供了有力支撐。本文從仿生導航的內涵、仿生導航傳感器技術、仿生導航方法等方面簡要介紹了國內外研究現狀和發展趨勢。
1 仿生導航的內涵
大自然中許多動物具有驚人的導航本領,例如:北極燕鷗每年往返于南、北兩極地區,旅程達5×104~6×104km,從不迷航;信鴿能夠在距離飼養巢穴數百km遠的陌生地方,順利返回巢穴;美洲的黑脈金斑蝶每年秋季從加拿大飛到墨西哥,行程約4800km,卻從不迷路。
在19世紀40年代,Tolman發現在迷宮實驗中的老鼠能夠迅速地找到通往食物的捷徑,并且當熟悉路徑被阻擋后能夠找到新的路徑[1]。據此,Tolman提出了認知地圖的概念,認為認知地圖中包含有產生復雜導航行為的經驗知識[2]。從目前生物學的研究成果可知,動物導航經驗知識的信息源主要包括視覺、運動感知、地磁、天空偏振光以及聲覺和嗅覺等。神經學領域的研究還發現了多種與動物導航行為密切相關的功能性神經細胞,包括位置細胞[3-4]、網格細胞[5-6]、頭朝向細胞[7-8]等。最新研究還表明,多個位置細胞的聯合激活機制與動物認知運動環境的拓撲結構以及拓撲空間中的路徑規劃有關[9-10]。雖然現有研究還沒有完全解釋大腦神經活動與動物導航行為之間的相互作用機制,但相關研究成果仍然開闊了人類對動物導航方式的理解。
對昆蟲[11]和鳥類[12-13]等動物導航行為的研究成果也為仿生導航技術提供了豐富的參考。對信鴿返巢行為的研究發現:將同一信鴿在同一地點多次釋放后,雖然它們每次的返巢路線都各不相同,但都經過某些相同的地標節點(如圖1所示)[12];并且,這些地標節點往往具有明顯的地理特征信息[13]。信鴿的返巢路線可以看成是將這些地標節點按某種方式連通的拓撲導航路線圖。國內有的學者將信鴿與候鳥的這種導航行為抽象為“航向約束+環境感知+學習推斷”的導航模式[14-15],他們認為“航向約束+環境感知”是靠器官與大腦的聯動來實現的,學習推斷結果的正確與否是靠導航經驗知識與導航決策機制的共同作用來保證的。

圖1 信鴿回巢路線示意圖(圖片來源于文獻[12])Fig.1 The homing trajectories of a pigeon(Reproduced from [12])
仿生導航,顧名思義是一種“模仿+借鑒”動物導航本領的新的導航技術。傳統導航技術大多數情況是在幾何空間內研究導航問題,關注于對導航參數的精確測量。然而,自然界中大多數動物往往不具備對導航參數精確測量的能力,但它們仍然能夠完成各種復雜的導航任務。
與常用的導航技術相比,除了導航傳感器層面的差別外,仿生導航技術最大的特點是可以綜合利用幾何空間內的導航信息與拓撲空間內的導航經驗知識、導航拓撲空間關鍵節點的引導指令等,從而得到面向任務的導航指令集,然后按照某種導航模式(例如,“航向約束+環境感知+學習推斷”的節點遞推導航模式)引導載體運動。根據需要,可以將多個不同類型的仿生導航傳感器進行組合,也可以將仿生導航傳感器與其他導航傳感器(例如,慣性傳感器)組合,構成混合式仿生導航系統。
2 仿生導航傳感器技術
仿生導航傳感器包括仿生光羅盤、仿生磁羅盤、仿生復眼等,這些導航傳感器借鑒了動物器官感知自然環境形成導航信息的機理和大腦內導航細胞處理信息的機制,可以將自然界的光、磁和場景特征等信息源轉化為載體運動的航向、位置、速度、姿態等導航信息,具有全自主、抗干擾、測量誤差不隨時間積累等特點。
2.1 仿生光羅盤技術
仿生光羅盤是一種通過借鑒動物視覺器官感知太陽偏振光信息(包括月光)的機理,以獲得載體航向信息的傳感器。其基本工作原理是:通過偏振光傳感器測量天空的偏振信息,根據天空觀測點處偏振光的最大E矢量振動方向垂直于由觀測者、天空觀測點以及太陽所構成的觀測平面的特殊幾何關系,結合時間、觀測位置和太陽星歷,解算出載體的航向角。
2000年,Lambrinos等采用光電二極管,研制了一種模仿昆蟲偏振光敏感單元的點測量式仿生光羅盤[16]。此后,大連理工大學褚金奎教授課題組對這種結構的偏振光羅盤進行了改進,并提出了一種新的定向算法[17-18]。中北大學劉俊教授團隊分別研制了四通道和六通道的點測量式偏振光羅盤,并對傳感器標定方法進行了深入分析[19-20]。國防科技大學胡小平教授團隊研制了六通道點測量式仿生光羅盤[21]和基于相機的面測量式仿生光羅盤[22-23],并對光羅盤定向算法[24-25]和光羅盤/多傳感器組合導航方法進行了深入研究[26-29]。仿生光羅盤的國內外發展概況如圖2所示。
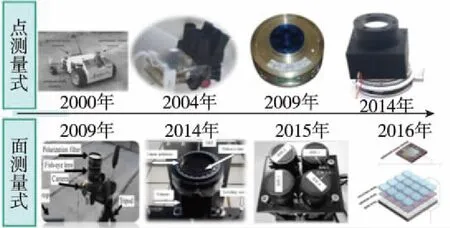
圖2 國內外仿生光羅盤技術發展概況Fig.2 The development of the polarization compass
仿生光羅盤與傳統的航向傳感器相比,具有抗干擾性強、誤差不隨時間積累、易于微小型化等優點,主要缺點是定向精度受天空能見度影響較大。目前,對仿生光羅盤技術的研究主要集中在大氣偏振模式建模[30]、傳感器誤差機理分析與補償方法[31-32]、偏振光定向算法[24-25, 32]、像素化偏振成像專用芯片技術、微小型化集成技術、全天候復雜天空背景自適應技術[26]等方面。其中,像素化偏振成像專用芯片和微小型化集成技術是研究的熱點和難點。
從原理上考慮,偏振光相機既可以用于偏振成像[24],也可以作為偏振光羅盤使用[33]。但應該指出的是,采用偏振光相機作為航向傳感器,有些大材小用,也不利于偏振光羅盤的微小型化和低成本。從已查到的文獻資料來看,目前還沒有一款微小型化的偏振光羅盤樣機問世。
2.2 仿生磁羅盤技術
信鴿視網膜上的光敏分子易受光的激發,形成單重態和三重態的自由基對。當外界磁場介入后,會影響單重態和三重態分子的轉換速率,這樣就建立了磁場和光信息轉換的關系[34](如圖3所示);此外,信鴿上喙及內耳結構中喇叭狀的非晶鐵質層能夠對微弱的地磁信號進行集聚放大,從而實現對微弱地磁信號的感知[35]。現有仿生磁羅盤的基本工作原理也有兩類:一類是基于自由基對磁敏感機理,設計制造自由基對磁電敏感單元,實現高靈敏地磁場檢測;另一類是基于非晶鐵質涂層和鏈狀磁片的磁敏感效應,利用高磁導率材料加工磁性集聚結構進行增敏,實現大量程高精度地磁場測量。仿生磁羅盤具有靈敏度高、全天候全區域、易于微小型化等優點,主要缺點是易受電磁干擾。

圖3 自由基對磁敏感原理示意圖Fig.3 Illustration of the radical-pair-based magnetoreceptor
目前,對仿生磁羅盤技術的研究主要集中在自由基對及鐵磁顆粒團簇地磁敏感機理[36-37]、量子磁光效應敏感材料制備工藝、磁矢量測量技術、傳感器誤差機理分析與補償方法、微小型化集成技術等方面。
需要指出的是,如果將仿生光羅盤與仿生磁羅盤以及微慣性測量單元(Micro Inertial Measure-ment Unit,MIMU)組合[29],進行小型化、一體化集成設計,構成仿生復合羅盤,可以實現優勢互補,顯著增強仿生航向傳感器的整體性能,并且還可以增加概略定位功能(定位精度在幾十km量級)[38]。
2.3 仿生復眼技術
研究發現,昆蟲復眼是由成千上萬個結構和功能相同的子眼構成的一種特殊成像系統。以曲面陣列方式排列的子眼視場角度能夠達到全視場,使得復眼在環境感知方面有著獨特的優勢。仿生復眼是借鑒昆蟲的視覺器官感知光流和環境特征信息的機理,測量載體姿態、速度和位置等導航參數的傳感器,其基本工作原理是:通過多個面向不同方向的孔徑,對大視場內的場景進行成像,然后集成到同一探測器上進行圖像輸出。在此基礎上,通過仿生光流和場景識別等算法,獲得載體的運動速度和在環境中的相對位置等信息。仿生復眼系統具有體積小、視場大、畸變小、孔徑多、靈敏度高、動態范圍高等優點。
目前,國內外已經提出了多種仿生復眼設計方案。2007年,Radtke等提出了一種球面仿生復眼結構[39];Julia等則實現了一種可在晶圓上進行加工構建的復眼系統,有效降低了復眼尺寸[40];受節肢動物復眼結構的啟發,Song等在2013年研發出了一款近半球面形的仿生復眼[41];Voillet等在圓柱面上集成了630個小眼,實現了大視場成像效果[42];Xiao采用了可伸展的硅基光電探測器,成功集成了包含 180個小眼的半球面狀復眼傳感器[43];Hao結合了昆蟲復眼結構和人類視覺器官結構,研制了一種混合型的仿生復眼系統[44]。仿生復眼傳感器的發展概況如圖4所示。當前,仿生復眼傳感器已進入實用階段,例如美國的新一代無人機“蜂鳥”上就配備了一部18億像素的高分辨率復眼相機。

圖4 國內外復眼傳感器技術發展概況Fig.4 The development of the artificial compound eye
目前,對仿生復眼技術的研究主要集中在仿生復眼結構設計與實現[45]、微光學耦合成像工藝[46]、圖像校正和高動態/超分辨方法[47]等;仿生復眼未來的發展趨勢有快速/高精度運動測量、仿生復眼系統微小型化設計與集成制造技術等方面。
3 仿生導航方法
仿生導航方法主要涉及導航經驗知識的表達與機器學習、多源異質導航信息柔性融合和面向任務的仿生路徑規劃與導航等方面。
3.1 導航經驗知識的表達與機器學習方法
經驗知識是動物完成各項復雜導航任務的重要基礎。例如,在迷宮實驗中的老鼠隨著導航經驗知識的積累,能夠迅速找到最佳覓食路徑[1]。信息源是提煉經驗知識的基礎,離線或在線獲取的經驗數據已廣泛地應用于現有導航系統中。例如,離線構建的街景圖[48]、道路網絡圖[49]、衛星地圖[50]等可以為無人車、無人機的自主定位與導航提供豐富的先驗參考信息。在未知環境中,則可以通過存儲在線獲取的環境感知數據作為導航經驗知識[51]。然而,現有導航方法在經驗知識的表達、組織和應用方面都與動物相差甚遠。
動物對導航經驗知識的表達方法具有較好的魯棒性,它們能夠在復雜環境下使用視覺地標和天空偏振態等進行導航。在基于視覺的導航經驗知識表達方面,雖然研究者們采用了多種基于手工設計的視覺特征表達方法[52],但這些表達方法仍易受到光照、視角和季節變化等因素的影響。近年來,有研究者采用機器學習的方法,例如支持向量機[53]和卷積神經網絡[15]等技術,對視覺經驗的表達方法進行了學習,并展現出了良好的特征表達魯棒性。除視覺信息以外,天空偏振光、地磁等也是動物導航經驗知識的重要來源。但當前對地磁和偏振光的研究大多集中于仿生傳感器方面,對基于地磁和偏振光的經驗知識表達與學習研究則相對缺乏。
動物能夠對經驗知識之間的相互關系進行學習和表達,形成可供自主導航使用的經驗知識圖譜。Cummins等采用無監督學習方法,構建了視覺特征之間的概率依賴樹,并根據特征之間共同出現的概率來判斷載體位置[76]。認知科學研究表明,動物的認知地圖中采用了拓撲圖的形式對經驗知識進行組織和表達[9, 54]。利用拓撲圖表達經驗知識之間的空間關系不僅符合高等動物的認知,還可以有效降低路徑規劃中的搜索空間,提升路徑規劃算法的實時性。然而,現有導航拓撲圖大多是基于環境中天然的拓撲結構進行構建的,例如,道路網絡圖[49]、室內平面圖[55]等。基于位置細胞、網格細胞等構建的類腦導航模型也可以構建出二維平面環境的導航拓撲圖,但相關研究僅處于仿真驗證階段[56]。當前,對面向無人機等在三維開放空間中運動的導航拓撲圖研究則相對較少。
此外,有學者認為導航經驗知識還包括知識推理機制,這種推理機制能夠迅速找到通往目標點的捷徑或安全路線[15, 57]。值得關注的是,關于圖網絡方面的研究為導航經驗知識表達與知識推理提供了新的思路。圖神經網絡不僅能夠學習各知識節點和節點連通邊的表達方法,還能夠解決最短路徑規劃等推理問題[57]。最近,Chen等首次實現了基于圖神經網絡的自主導航與定位[58]。
3.2 仿生多源異質導航信息融合方法
無論是動物還是移動載體,在導航過程中都需要對自身的運動狀態進行估計,魯棒、準確的導航狀態估計往往需要對多種導航信息進行融合。在傳統導航系統中廣泛使用的信息融合方法有卡爾曼濾波器、粒子濾波器等。這些方法具有較好的導航參數估計精度,但需要建立準確的數學模型,且對融合信息的時間同步關系、空間標定關系、噪聲特性等有一定要求。與此相比,許多動物雖然不具備精確估計導航參數的能力,但卻展現出驚人的自主導航能力,這與它們優秀的多源異質導航信息融合能力緊密相關。
神經科學領域的研究成果部分揭示了動物的多源異質導航信息融合機制。Milford等基于吸引子網絡模型,構建了包含位置細胞和方向細胞模型的RatSLAM算法,實現了對路徑積分信息和視覺重定位信息的有效融合[59]。雖然該方法采用了精度較低的路徑積分模塊和低維度的視覺特征模板,但仍然在室外大范圍實驗中展現出了優異的建圖與定位性能。網格細胞是位置細胞的主要輸入,據此研究者們將多尺度的網格細胞通過競爭學習[60-61]或干涉模型[14]激活位置細胞,形成對位置的魯棒估計。此外,通過構建三維吸引子網絡和多層級方向細胞,可以實現在三維空間中對路徑積分和視覺重定位信息的有效融合[62]。
人工神經網絡具有與生物神經元類似的連接結構,因此也被認為是一種仿生信息處理方式。深度神經網絡通過大量的神經元和復雜的連接關系,可以實現復雜的信息處理功能。2017年,Ronald提出了VINet深度網絡結構,首次實現了視覺/慣性組合里程計功能[63]。后續,研究者們提出了多種改進神經網絡結構,對視覺/慣性[64]、雷達/視覺/慣性[65]等多源異質信息進行了有效融合,并展現出了與基于傳統卡爾曼濾波的組合方法相近的導航參數估計精度。在復雜環境和傳感器噪聲模型未知等條件下,基于神經網絡的信息融合方法比傳統組合方法展現出了更為優異的魯棒性。然而,神經網絡高度依賴于訓練數據,當傳感器特性或測量數據與訓練數據有較大差異時,基于神經網絡的組合導航精度也會隨之下降。如何有效結合神經網絡在信息融合魯棒性方面的優勢以及模型類方法在精度和模型解釋性等方面的優勢成為了當前的研究熱點之一。近年來,有研究者提出了多種與卡爾曼濾波器相似的信息融合神經網絡結構,以發揮兩類方法在多源異質信息融合中的優勢[66]。
3.3 面向任務的仿生路徑規劃與導航方法
路徑規劃是在一定的約束條件下,根據載體當前狀態和目標狀態,尋找最優路徑的過程。傳統導航方法中,常用的路徑搜索方法有A*搜索算法[67]和Dijkstra搜索算法[68]等。在大范圍路徑規劃中,由于搜索空間維度較高,傳統路徑搜索方法所需的計算資源和時間成本較高。與此相比,動物的導航行為具有明顯的目標導向(goal-directed)特點,即能夠根據特定導航任務快速規劃出運動路徑。
偏振光導航是在自然界中發現的一種典型的面向任務的導航方式。研究發現,沙漠螞蟻在覓得食物后,可以從距離巢穴數百米的地方幾乎沿直線準確返回。目前,研究者們認為螞蟻融合了從偏振光獲取的航向信息和計步/光流中提取的距離信息進行路徑積分;然后根據路徑積分結果估計指向蟻穴的返回向量,當到達蟻穴附近時則依靠熟悉的地標特征引導。Lambrions等首次在輪式移動平臺上實現了這種仿沙漠螞蟻的偏振光導航方式[16];禇金奎等基于自研的偏振光羅盤,在兩輪移動平臺上實現了仿生偏振光自主導航[69];Julien等利用多足機器人的計步信息和2個由14個像素組成的偏振光羅盤進行了自主導航實驗,結果表明該多足機器人具有與沙漠螞蟻相似的導航行為[70]。當前,已有的仿生偏振光導航案例都應用于地面移動平臺。而蜜蜂、蜻蜓等飛行昆蟲也利用偏振光進行導航,研究適用于小型無人機的仿生偏振光導航具有重要的應用前景。
信鴿等動物能夠認知導航環境的拓撲結構,并根據拓撲地圖進行面向任務的節點遞推導航(如圖1所示)。節點遞推導航具有重要的應用價值,當導航系統的精度不足以直接將載體從起始點引導至終點時,載體可以按順序經過多個節點,并利用節點中的經驗知識(如已知的地標特征等)校正導航誤差,提升到達目標點的置信度。位置細胞的聯合激活特性被認為與動物的節點遞推導航方式密切相關[9-10]。基于位置細胞特性,Erdem構造了類腦細胞計算模型,并在仿真環境下實現了節點遞推路徑規劃,然而該模型僅停留在仿真驗證階段[56, 71]。視覺信息是影響位置細胞充放電活動的主要因素之一[72],因此有研究者將離散分布的地標特征構建為拓撲節點,并采用人為設計的連接規則構建節點之間的連通邊,然后采用圖搜索的方法進行自主導航[73]。在動物的認知地圖中,不同節點中的經驗知識是如何進行關聯的這一機理還沒有被人類揭示,但信鴿的返巢路線表明幾何空間中相隔較遠的節點區域在拓撲空間中也存在連通邊。分析認為,這是因為信鴿能夠借助偏振光、地磁等提供的航向約束信息飛越幾何空間中不相鄰的節點區域。據此,有研究者提出了根據導航系統的航向保持精度指標構建拓撲節點之間的連通邊;在節點遞推導航過程中,則依靠航向約束飛越拓撲空間中的相鄰節點[15]。
面向任務的導航方法也可以描述為一個學習推斷過程。動物能夠在日常的導航任務中不斷地積累經驗知識,當環境發生變化或導航任務發生變化時,它們仍然能夠根據經驗知識采取靈活的導航策略到達目標點。采用機器學習技術對面向任務的運動策略進行學習已成為當前的研究熱點之一。唐華錦等構建了一種循環脈沖神經網絡,用于模擬大腦學習導航經驗的過程,并成功運用于實際移動平臺小范圍的自主導航中[74]。DeepMind的研究人員通過深度學習技術,使神經網絡中的神經元具有與導航細胞類似的激活特性;據此,他們還采用了強化學習方法對面向任務的自主導航策略進行學習(如圖5所示)[75],在仿真環境中,通過學習得到的導航策略能夠迅速找到高效通往目標點的路徑。最新研究還表明,大腦中也存在強化學習機制,并且動物進行導航推斷的知識圖譜結構與其他任務的經驗知識圖譜(例如,推斷人際關系的知識圖譜)可能是同一知識圖譜,只是應用實體有所不同[54]。

圖5 面向任務的仿生導航方法示意圖(圖片來源于文獻[75])Fig.5 Schematic of vector-based bio-inspired navigation(Reproduced from [75])
4 總結與展望
仿生導航技術是導航領域未來發展的新方向,也是當前的研究熱點之一。各種仿生導航傳感器的研制豐富了導航系統的感知能力;仿生導航方法的發展則為解決當前所面臨的導航難題提供了新的技術途徑。目前,國內外仿生導航技術研究方興未艾。2019年,美國波士頓大學、澳大利亞墨爾本大學等聯合研究的Neuro-Autonomy項目獲得了美國海軍研究院750萬美元的資助,以期在動物導航神經活動、導航知識表示、自主導航與控制等方面進行突破,構建可在非結構化環境和未知環境中自主移動的無人平臺;美國能源部資助斯坦福研究中心的BrainSLAM項目關注于構建仿類腦模型的同時建圖與定位技術;DeepMind公司則聚焦于基于機器學習技術的仿生導航系統,以期實現靈活自主的導航功能。
展望未來,仿生導航技術需要在導航傳感器與導航方法2個方面進行突破:
1)現有仿生導航傳感器雖然實現了對相應感知信息的測量,但在信噪特性、功耗體積等方面都與動物器官存在較大差距,還需進一步對動物器官的感知機理、傳感器結構設計、傳感器加工工藝等方面進行深入研究。此外,基于仿生傳感器的導航信息提取算法也是研究重點之一,研究魯棒性好、自適應性強、精度高的仿生光羅盤定向算法、仿生光流運動估計算法、光磁復合定向算法等可為仿生導航系統提供可靠的導航信息。
2)目前,動物的導航機理還沒有完全被人類所理解。研究認為,大腦中位置細胞、網格細胞等導航細胞的充放電活動與動物的視覺、嗅覺和路徑積分等信息密切相關。然而,器官感知信息驅動導航細胞活動的具體機制還沒有被完全揭示;大腦中各種不同的導航細胞是如何相互作用、協同工作,進而產生各種靈活高效的導航行為的過程也還有待進一步探究。為解決上述問題還需要在認知學、動物行為學、機器學習等領域開展交叉研究。近年來,將動物導航機理與機器學習技術相結合,研究智能化的仿生導航技術逐漸成為新的發展趨勢。深度神經網絡中復雜的神經元連接關系,可用于模擬大腦導航細胞的空間編碼、知識學習、信息融合和導航推斷等機制。深度學習技術為構建智能的仿生導航系統提供了新的技術手段;同時,動物導航過程中的神經活動和認知機理則為孕育出新的機器學習方法提供了基礎。例如,最新研究表明,與導航密切相關的大腦前額皮層中的學習推斷過程可以用元強化學習進行描述[77]。
猜你喜歡
黨課參考(2021年20期)2021-11-04 09:39:46
小哥白尼(軍事科學)(2019年6期)2019-03-14 05:49:56
黨課參考(2018年20期)2018-11-09 08:52:36
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
都市麗人(2015年4期)2015-03-20 13:33:22
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32