基于時間權(quán)函數(shù)的落角約束導(dǎo)引律中剩余時間的估計方法
2020-07-29 01:45:40張友安趙賀偉
導(dǎo)航定位與授時 2020年4期
梁 勇,張友安,趙賀偉
(1. 海軍航空大學(xué)岸防兵學(xué)院, 煙臺 264001; 2. 煙臺南山學(xué)院電氣與電子工程系, 煙臺 265713)
0 引言
隨著戰(zhàn)場目標(biāo)對抗手段日益多樣,對導(dǎo)彈的攻擊要求也逐步增多。導(dǎo)彈在命中目標(biāo)時,不僅希望獲得最小脫靶量,還往往希望命中目標(biāo)時導(dǎo)彈姿態(tài)最佳,以使戰(zhàn)斗部發(fā)揮最大效能,取得最佳毀傷效果。在末制導(dǎo)約束中,通過線性二次最優(yōu)控制理論可以得到滿足落角和脫靶量約束的最優(yōu)制導(dǎo)律[1-4]。針對這一問題,不少文獻(xiàn)開展了相關(guān)研究[5-7]。針對垂直平面內(nèi)的再入飛行器,文獻(xiàn)[1]提出了一種控制落角約束的最優(yōu)制導(dǎo)律;文獻(xiàn)[2]提出了一種帶落角約束的能量最優(yōu)制導(dǎo)律設(shè)計;文獻(xiàn)[3]提出了考慮終端速度約束的最優(yōu)制導(dǎo)律,并且可以將速度約束直接轉(zhuǎn)變成終端落角約束;文獻(xiàn)[4]針對以不同的速度打擊機(jī)動目標(biāo)的情況研究了帶落角控制的制導(dǎo)律,將該制導(dǎo)律與彈上預(yù)測目標(biāo)位置跟蹤器結(jié)合在一起;文獻(xiàn)[5]和文獻(xiàn)[6]針對任意階常速導(dǎo)彈系統(tǒng),得到了基于能量最優(yōu)、落角約束的最優(yōu)制導(dǎo)律的廣義形式;文獻(xiàn)[7]通過考慮與文獻(xiàn)[2]一樣的代價函數(shù)得到了一種最優(yōu)制導(dǎo)律,并假設(shè)當(dāng)前的加速度命令為剩余時間的線性形式,將零脫靶量和終端速度誤差作為狀態(tài)變量,通過將終端速度矯正到落角方向可以得到期望的終端落角;文獻(xiàn)[8]針對落角和終端速度約束提出了最優(yōu)制導(dǎo)律。上述制導(dǎo)律都是基于最優(yōu)控制理論得到的,而文獻(xiàn)[9]和文獻(xiàn)[10]在比例導(dǎo)引律的基礎(chǔ)上添加了控制落角約束的一個時變偏置項。對于靜止目標(biāo),文獻(xiàn)[11]的圓軌跡制導(dǎo)是偏置比例導(dǎo)引的另外一種形式,該制導(dǎo)律的主要思想是將導(dǎo)彈導(dǎo)引在導(dǎo)彈和目標(biāo)之間的橢圓軌道上。盡管當(dāng)N=3時比例導(dǎo)引律情況下能量是最優(yōu)的,但是考慮初始位置或者角度存在誤差、目標(biāo)機(jī)動等外界干擾和不確定性的情況,在實際中N>3的情況是被應(yīng)用于導(dǎo)彈系統(tǒng)中的[12]。注意到比例導(dǎo)引律的制導(dǎo)增益是和導(dǎo)彈和目標(biāo)的能量比例相關(guān)的[13]。其他關(guān)于制導(dǎo)增益的解釋可以參考文獻(xiàn)[14]。
對于上述最優(yōu)制導(dǎo)問題的閉環(huán)形式的解,需要知道準(zhǔn)確的剩余時間[15],但是剩余時間又不能通過任何的裝置來測量。最優(yōu)制導(dǎo)律的性能取決于剩余時間估計的準(zhǔn)確度,因此,需要一個比較可行的剩余時間估計算法。由于落角控制的彈道軌跡是比較彎曲的,所以傳統(tǒng)的估計剩余時間的方法(距離除以速度)會產(chǎn)生很大的誤差,尤其是導(dǎo)彈在末制導(dǎo)段的初始時刻。針對上述問題,本文通過建立導(dǎo)彈實際軌跡近似模型,提出了一種實用的剩余時間計算方法。
1 落角約束最優(yōu)制導(dǎo)律設(shè)計
針對靜止或者緩慢移動的目標(biāo),圖1所示為末制導(dǎo)段幾何關(guān)系。其中,Vm、θm和θmf分別表示導(dǎo)彈的速度、彈道傾角和期望的落角,am是垂直于導(dǎo)彈速度的法向加速度,通過控制輸入u(t)來實現(xiàn)。
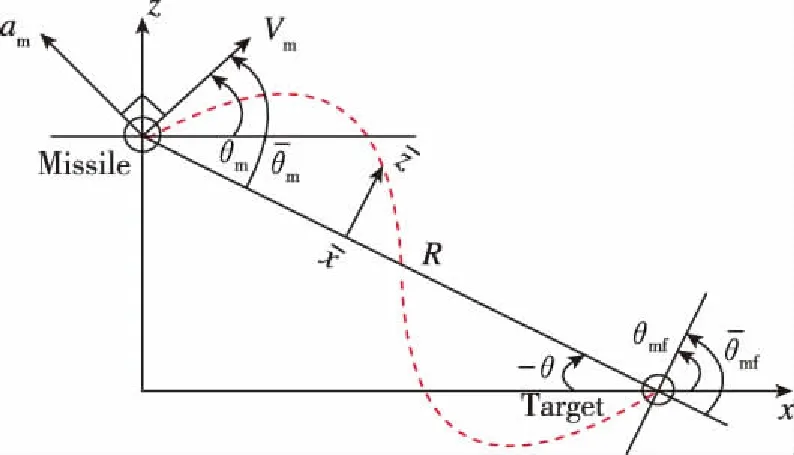
圖1 規(guī)劃航跡示意圖Fig.1 Planned trajectory of the missile
如圖1所示,導(dǎo)彈末制導(dǎo)階段運動方程為
(1)
在假定Vm是常量和θm小角度的情況下,可以線性化方程式(1)。
定義
v(t)=Vmθm(t)
(2)
系統(tǒng)狀態(tài)方程為
(3)
其中
(4)
(5)
最優(yōu)控制問題為,尋找控制變量u(t)使得以下性能函數(shù)值最小
(6)
并且滿足方程
Dx(tf)=E
(7)
其中
(8)
vf=Vmθmf,tf代表飛行時間,R是正的加權(quán)函數(shù)
(9)
剩余時間的定義為
tgo=tf-t0
(10)
當(dāng)N=0時,問題就變成了文獻(xiàn) [5]中的純能量最優(yōu)控制問題。使用式(9)中的剩余時間加權(quán)函數(shù),可以改變制導(dǎo)指令分布。對于N>0,當(dāng)t→tf時代價函數(shù)逐漸增大,所以當(dāng)t=tf時控制最后變成0。
通過對最優(yōu)控制問題求解可以得到狀態(tài)反饋解為
u*(t)=R-1BTFG-1(FTx(t)-E)
(11)
其中
(12)
將式(5)和式(8)式代入式(12),可得
(13)
對于一個非負(fù)整數(shù)N,可以得到
(14)
其中

(15)
(16)
(17)
把式(15)和式(17)代入式(11)中,用Vmθm代替v(t)。經(jīng)過簡化可以得到一階慣性環(huán)節(jié)系統(tǒng)的帶落角約束的最優(yōu)制導(dǎo)律為
A2)Vmθm(t)+(A1f31+A2f32)am(t)-
A1zf-A2Vmθmf]
(18)
其中
A1=f31g22-f32g21
A2=f32g11-f31g12
(19)
如果導(dǎo)彈控制系統(tǒng)的響應(yīng)時間較小或者飛行時間相對時間常數(shù)較大時,可忽略時間常數(shù)τ。在式 (18)中,令τ→0,zf=0,那么無慣性環(huán)節(jié)控制系統(tǒng)的帶落角約束的最優(yōu)制導(dǎo)律(Optimal Guidance Law with Impact Angle Constraint, OGL/IAC-0)為
(20)
其中
(21)
上述制導(dǎo)律需要已知z(t)和θm(t)的值。可以通過測量導(dǎo)彈和目標(biāo)的視線角信息θ(t)來計算z(t)的值。此時,θ(t)可以近似為
(22)
那么式(20)可以改寫為
(23)
實際中,對于N>0的情況,制導(dǎo)增益是可行的,因為當(dāng)接近目標(biāo)時制導(dǎo)指令是趨近于0的。這個特性很重要,因為它能保證抵抗外界干擾的不確定性、模型的不確定性和制導(dǎo)命令飽和限制。如果導(dǎo)彈的速度由于空氣阻力而減少,那么可以通過選擇一個較大的制導(dǎo)增益來避免性能的惡化。相反地,一個小的增益可以降低感應(yīng)噪聲的靈敏度。對于大多數(shù)的情況,理想的制導(dǎo)增益都是通過非線性仿真來選擇。
2 剩余時間估計方法
針對上述制導(dǎo)律,最常用的也是最簡單的剩余時間估計方法是用剩余距離除以導(dǎo)彈速度,即tgo=R/Vm。這種方法在彈道彎曲時會產(chǎn)生較大誤差。為此,本文考慮將OGL/IAC-0的軌跡通過剩余路程的N階多項式函數(shù)來近似。



(24)

(25)
為了求解式(24)和式(25)中的系數(shù),需要N+4個邊界條件。當(dāng)N=0時,由文獻(xiàn)[5]可知,存在4個邊界條件,包括t和tf時刻的位置和飛行路徑角
(26)
當(dāng)N>1時,需要N個額外條件,可以給定t=tf時刻的加速度條件為
(27)
由于Vm為常值,tgo可以通過路徑的長度除以導(dǎo)彈的速度得到
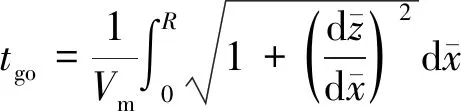
(28)
式(28)表示的剩余時間可以理解為距離除以速度再乘以由于路徑的彎曲而導(dǎo)致長度增加的一個補償項。在以下給定的近似條件下
(29)
對于每個N值可得到k的值為
(30)
3 仿真結(jié)果
仿真條件如下:導(dǎo)彈初始位置為(0,2000)m,目標(biāo)位置為(1200,0)m,導(dǎo)彈速度為VM=200m/s,初始彈道傾角θM(0)=0°,期望的落角θf分別取30°,60°,90°。
表1所示為采用傳統(tǒng)方法和本文方法對導(dǎo)彈剩余時間進(jìn)行估計的相對誤差。由表1中可知,相對于傳統(tǒng)的剩余時間計算方法tgo=R/Vm,本文提出的剩余時間估計方法對所有的N都有很高的精度。
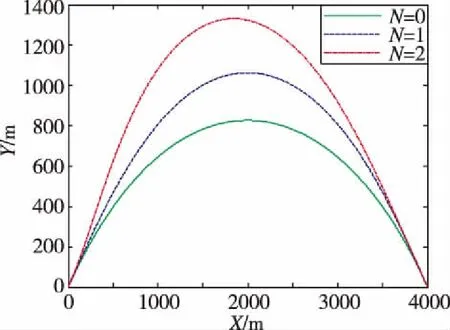
(a)彈道軌跡
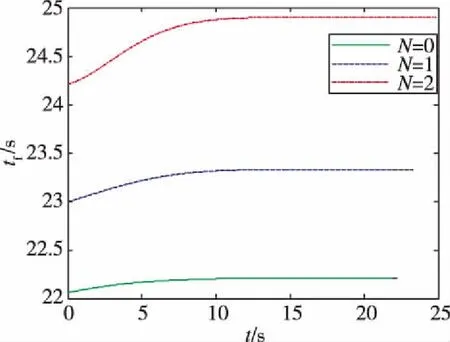
(b)剩余時間估計圖2 θm0=60°,θmf=-60°時仿真結(jié)果Fig.2 Simulation results under θm0=60°,θmf=-60°
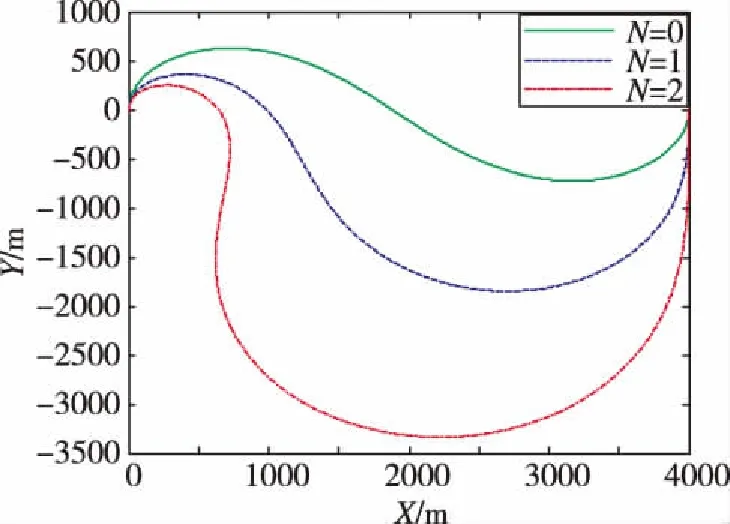
(a)彈道軌跡
表1 導(dǎo)彈剩余時間估計相對誤差Δtfmax/tf(%)Tab.1 Fractional error of time-to-go estimation
4 結(jié)論
本文采用最優(yōu)控制理論設(shè)計了考慮落角約束的閉環(huán)制導(dǎo)律,針對所需的剩余時間估計問題,基于導(dǎo)彈飛行近似軌跡,提出了一種實用的剩余時間估計算法。仿真結(jié)果表明,該方法相對于傳統(tǒng)的估計方法,在不同的落角約束和制導(dǎo)增益條件下,相對精度平均提高了13倍以上。