非量測數(shù)碼相機(jī)三種檢校方法的適用性評價
2020-07-31 03:10:26谷晴晴李浩丁影宋美杰胡齡心
遙感信息 2020年3期
關(guān)鍵詞:方法
谷晴晴,李浩,丁影,宋美杰,胡齡心
(河海大學(xué) 地球科學(xué)與工程學(xué)院,南京 211100)
0 引言
近年來,隨著無人機(jī)的快速發(fā)展和日漸成熟,無人機(jī)測繪技術(shù)在地形圖繪制和城市三維建模等方面得到了廣泛應(yīng)用。然而,由于無人機(jī)自身體積小、載荷輕的特點,大多搭載的是非量測數(shù)碼相機(jī)來完成拍攝工作。非量測數(shù)碼相機(jī)憑借其成本低、重量輕、使用靈活方便等優(yōu)勢被廣泛使用,但同時也存在著內(nèi)方位元素未知、光學(xué)畸變差較大等缺陷,嚴(yán)重影響了攝影測量工作的精度[1-4]。相機(jī)檢校技術(shù)可得到相機(jī)的內(nèi)方位元素和畸變系數(shù),恢復(fù)正確的光束形狀,進(jìn)而提高地形圖測繪和實景三維建模的精度[5-7]。目前,相機(jī)檢校的方法有很多,但通常在實用性和精度2方面很難兼得,在實際應(yīng)用中應(yīng)綜合考慮工作條件、成本高低、精度需求等因素來選擇一個合適的檢校方法。常用的相機(jī)檢校方法大體上可以分為2類:基于控制場的相機(jī)檢校和無需控制場的相機(jī)檢校。本文對3種基于控制場的典型檢校方法展開研究,它們分別是基于三維控制場的光線束相機(jī)檢校方法、基于二/三維控制場的聯(lián)合運(yùn)用透視變換和空間后方交會的相機(jī)檢校方法(calibration method based on perspective transform and resection,PTR),以及基于二維控制場的張正友標(biāo)定方法。本文首先對3種方法的檢校計算穩(wěn)定性展開實驗;然后對它們進(jìn)行了量測應(yīng)用精度的比較;最后對這3種檢校方法從檢校穩(wěn)定性、量測應(yīng)用精度和控制場布設(shè)難易方面進(jìn)行了適用性評價分析,為以后相機(jī)檢校方法在實際應(yīng)用中的合理選擇及保障無人機(jī)測繪質(zhì)量提供參考和幫助。
1 3種檢校方法的原理
1.1 三維光線束檢校方法
光線束檢校方法以共線條件方程式為基本數(shù)學(xué)模型,將像點坐標(biāo)作為觀測值,把內(nèi)外方位元素、畸變參數(shù)、控制點的物方坐標(biāo)等都作為未知參數(shù)進(jìn)行整體平差。當(dāng)考慮構(gòu)像畸變差[8]時,其通常包括鏡頭的徑向畸變和切向畸變。
另外,在平差過程中,對于控制點物方坐標(biāo)還需添加一組虛擬觀測方程,其有助于算法的收斂[9],保證算法的有效進(jìn)行。建立誤差方程式后,采用最小二乘方法即可求解。
1.2 PTR檢校方法
PTR是聯(lián)合運(yùn)用透視變換和空間后方交會進(jìn)行相機(jī)檢校的一種方法,將普通數(shù)碼相機(jī)的畸變系數(shù)和內(nèi)方位元素分別在二維、三維控制場中進(jìn)行檢校,以減弱2類參數(shù)之間相關(guān)性的影響,獲得良好的檢校效果[10-11]。該方法將畸變系數(shù)和內(nèi)方位元素的計算置于一個處理系統(tǒng)中,二者進(jìn)行交替解算,最終求得內(nèi)方位元素與畸變系數(shù)的檢校結(jié)果。
與光束法相機(jī)檢校相比,PTR中的交替解算有利于消除諸多未知參數(shù)間相關(guān)性的影響,并且平面間的透視變換有利于表達(dá)構(gòu)像畸變差影響。
1.3 張正友相機(jī)標(biāo)定方法
1998年,張正友[12]提出了一種介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間的基于平面模板的相機(jī)標(biāo)定方法。該方法利用相機(jī)線性成像模型求解相機(jī)參數(shù)的初值,然后利用目標(biāo)函數(shù)的非線性模型得到最優(yōu)的相機(jī)參數(shù)[13]。該方法標(biāo)定過程簡單,避免了傳統(tǒng)方法需要大型高精度控制場的要求,因此被廣泛使用。其具體內(nèi)容和操作參考文獻(xiàn)[12]。
2 實驗條件
本文實驗使用的相機(jī)型號為FUJIFILMX-T10數(shù)碼相機(jī),分辨率為4 896像素×3 264像素。在拍攝照片時,將攝影方式設(shè)置為手動曝光方式,物鏡對焦在無窮遠(yuǎn)處,從而鎖定主距,即鎖定了內(nèi)方位元素值和物鏡畸變系數(shù)。本文中利用的室內(nèi)精密三維控制場、二維平面格網(wǎng)控制場以及二維棋盤格微型控制場如圖1所示。
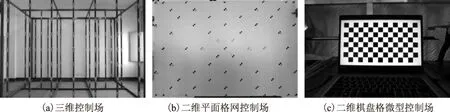
圖1 控制場
室內(nèi)精密三維控制場尺寸為3 600 mm×2 400 mm×2 000 mm,沿攝影方向分為前中后3個層面,最前面一層的控制點個數(shù)為49 個,后面兩層均為35 個控制點,均勻?qū)ΨQ分布在整個三維控制場中。二維平面格網(wǎng)控制場通過在特殊加工的硬質(zhì)平板上繪制方格網(wǎng)而生成,格網(wǎng)數(shù)目為12 格×18 格,每格100 mm×100 mm,在格網(wǎng)線交叉點中選擇47 個點,作為二維格網(wǎng)控制場的控制點。采用電腦程序生成7×14的黑白棋盤格,大小為20 mm×20 mm,角點數(shù)量共98 個,使其布滿整個屏幕,作為二維棋盤格微型控制場。
3 檢校計算穩(wěn)定性分析
檢校計算穩(wěn)定性指的是當(dāng)控制條件正常變動時,解算出來的參數(shù)應(yīng)該穩(wěn)定[14],它是一種評價相機(jī)檢校方法適用性的重要指標(biāo)。
3.1 光束法
實驗以室內(nèi)三維控制場為攝影對象。首先,在其正前方架設(shè)中間攝站;然后,在距此攝站左邊0.2 m處架設(shè)一個攝站;同樣地,在距中間攝站右邊0.2 m、0.4 m處分別架設(shè)另外2個攝站,總基線長度為0.6 m左右。4 個攝站距離控制場第一層約2.9 m,總共拍攝4張像片,使控制場影像均勻充滿整個畫幅,邊緣不可留出太多的空白,保證所攝像片中控制點均清晰可見,盡量無遮擋,然后分別利用2張、3張和4張像片進(jìn)行光束法解算。實驗給出了4種控制點組合:組合一屬于控制點共面的情況,利用了控制場第一層上的23 個控制點,它們基本處于同一平面,并且均勻分布;組合二和組合三屬于控制點較少和較多的情況,分別利用了控制場3個層面上的23 個控制點和54 個控制點,它們均位于控制場的邊角位置,在不同深度上數(shù)量相當(dāng),在同一平面上的分布均勻?qū)ΨQ;組合四屬于控制點稠密的情況,利用了控制場中的98 個控制點。用以上4種控制點組合進(jìn)行實驗,得到的內(nèi)方位元素如表1所示。
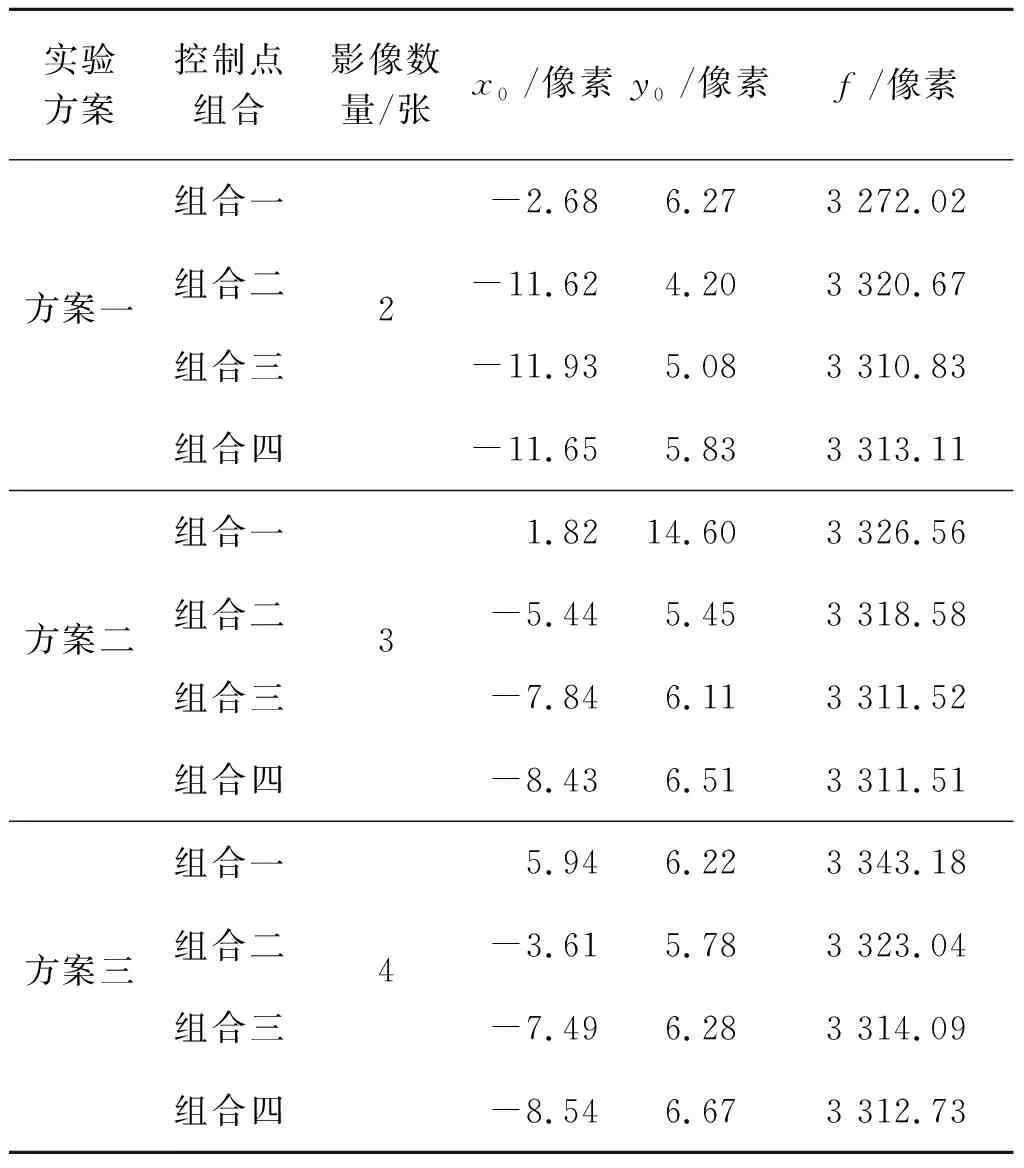
表1 3種方案下的內(nèi)方位元素
由表1可以看出,組合一和組合二之間f的偏差在3種方案下分別達(dá)到了48 個像素、8 個像素和20 個像素左右,雖然2種組合的控制點數(shù)量相同,但存在著是否共面的區(qū)別,內(nèi)方位元素之間有較大的偏差。由此可見,光束法對控制條件的要求較高。對于控制點不共面的組合二和組合三,方案二和方案三的f的偏差分別約為7個像素和9 個像素,方案一中的偏差約為10 個像素。由此可見,控制點的數(shù)量和分布對檢校結(jié)果也產(chǎn)生了較明顯的影響。而對于控制條件良好的組合三和組合四,方案一的檢校結(jié)果的最大偏差為2個像素,方案三的檢校結(jié)果的最大偏差為1 個像素,而方案二的檢校結(jié)果偏差更小,約為0.5 個像素,說明在控制條件良好的情況下,光束法的檢校結(jié)果較為穩(wěn)定。隨著控制點個數(shù)的增加,3種方案解算出來的相機(jī)參數(shù)都逐漸達(dá)到穩(wěn)定,但從整體上來看,方案二達(dá)到穩(wěn)定的速度更快一些。
可以看出,光束法檢校并不適合平面控制場,因此下節(jié)對有同樣性質(zhì)的PTR的后方交會不再測試控制點共面情況。
3.2 PTR方法
實驗以二維平面格網(wǎng)控制場和室內(nèi)三維控制場為攝影對象,攝站盡量設(shè)在2個控制場的正前方中軸線上,各拍攝一張像片,使控制場影像成對稱分布,并使拍攝的像片中二維格網(wǎng)可以充滿整個像幅,且各格網(wǎng)控制點清晰可見,便于量測,利用這2張像片便可以進(jìn)行PTR的解算。為了比較PTR方法的穩(wěn)定性,以不同的攝影距離對三維控制場拍攝了2張像片,從而使三維控制場上的控制點位置在這2張像片中發(fā)生了變化。其攝影距離分別為2.6 m和3.1 m,以這2種不同的攝影距離為根據(jù)得到2種實驗方案,并對每種實驗方案使用上述控制點組合當(dāng)中的3種組合進(jìn)行解算,得到的內(nèi)方位元素如表2所示。

表2 2種方案下的內(nèi)方位元素
由表2可以看出,2種方案下的組合二、組合三和組合四得到的相機(jī)參數(shù)最大偏差分別為4.5 個像素、3 個像素和2.5 個像素,表明在不同的攝影距離下PTR得出的檢校結(jié)果是比較穩(wěn)定的,并且隨著控制點數(shù)量的增加,檢校穩(wěn)定性也隨之提高。方案一下的組合二和組合三得到的相機(jī)參數(shù)最大偏差表現(xiàn)在像主點坐標(biāo)y方向上,約為2.5 個像素,而方案二表現(xiàn)在像主距f方向上,約為5 個像素,與方案一相比穩(wěn)定性較低,可能是由于控制場在影像中成像范圍較小造成的。而對于組合三和組合四,方案一和二下得到的相機(jī)參數(shù)最大偏差均表現(xiàn)在像主距f方向上,分別約為3 個像素和2 個像素,說明在控制條件良好的情況下,PTR的檢校結(jié)果是比較穩(wěn)定的。總體上來看,在不同的控制條件下,PTR方法的檢校計算穩(wěn)定性表現(xiàn)較好。
3.3 張正友相機(jī)標(biāo)定法
實驗以電腦顯示屏上的棋盤格影像為拍攝對象,對二維棋盤格的拍攝需保證整個顯示器的成像在像片中不可太小,通過調(diào)整屏幕或相機(jī)的方向,拍攝一組不同位置和角度的像片,總共拍攝了32張像片。為了驗證張正友標(biāo)定法的穩(wěn)定性,實驗給出了2種方案。方案一利用這組像片中的少量、中量和大量像片來進(jìn)行檢校計算,其中少量像片是7張,中量像片是17張,大量像片是32張;方案二給出這組像片中2組數(shù)量相同但拍攝位置不同的15張像片來進(jìn)行檢校計算,得到的內(nèi)方位元素如表3所示。
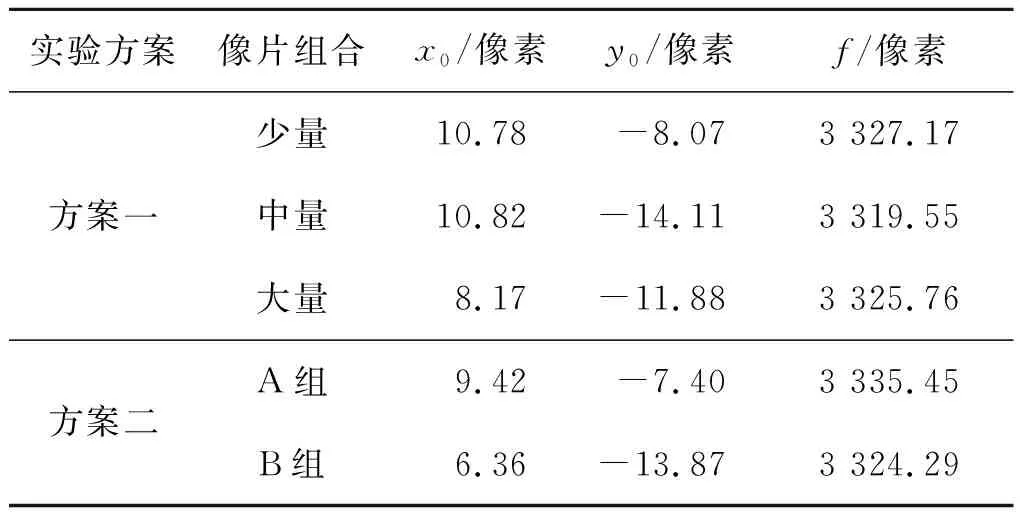
表3 2種方案下的內(nèi)方位元素
由表3可以看出,方案一的像主距f的最大偏差在7.5 個像素,而像主點坐標(biāo)x和y方向上的最大偏差分別為3 個像素和6 個像素。方案二的內(nèi)方位元素的最大偏差表現(xiàn)在像主距f方向上,達(dá)到了11 個像素,另外,像主點坐標(biāo)x和y方向上的偏差分別為3 個像素和6.5 個像素。由此可見,張正友標(biāo)定法的檢校計算穩(wěn)定性受像片數(shù)量和姿態(tài)的影響較大。
4 量測應(yīng)用精度的比較
在實際的測繪應(yīng)用中,往往將相機(jī)預(yù)先檢校得到內(nèi)方位元素和畸變系數(shù),然后作為量測型相機(jī)使用,利用檢校獲得的相機(jī)參數(shù)校正像點坐標(biāo),最后計算得到物方點位精度,即量測應(yīng)用精度,它是衡量檢校參數(shù)解算精度的實用標(biāo)準(zhǔn)。
實驗以室內(nèi)精密三維控制場為攝影對象,拍攝一個立體像對,利用3種檢校方法得到的最佳相機(jī)參數(shù),對像點坐標(biāo)進(jìn)行校正,然后使用攝影測量后方交會-前方交會量測算法,反算物方點位,得到檢校參數(shù)的量測應(yīng)用精度。選擇控制場中的8 個點作為控制點,它們分布在3個層面上的邊角位置,而其余的99 個點均作為檢查點。應(yīng)用后方交會-前方交會量測算法進(jìn)行解算并求出坐標(biāo)精度,物方坐標(biāo)采用近景攝影測量坐標(biāo)系,其X和Z方向分別沿水平和鉛垂方向,Y方向與拍攝方向相同。為了避免量測結(jié)果的偶然性,對每一種方法得到的校正影像各量算2次,結(jié)果如表4所示。

表4 3種方法的量測應(yīng)用精度比較
由表4可以看出,整體上來看,3種檢校方法得到的中誤差分布規(guī)律一致,均在Y方向較大,X方向最小,每種方法的2次計算結(jié)果基本上保持一致,解算較為穩(wěn)定。通過表中的平均點位中誤差可知,光束法與PTR方法的量測應(yīng)用精度相當(dāng),均表現(xiàn)良好,而張正友標(biāo)定法得到的精度比前二者略低些,但也可以滿足中低精度的應(yīng)用需求。
5 結(jié)束語
由于把所有的參數(shù)納入到一個平差模型中進(jìn)行解算,基于三維控制場的光線束相機(jī)檢校方法會受到參數(shù)間相關(guān)性的影響,導(dǎo)致解算精度降低和不穩(wěn)定,其穩(wěn)定性在控制條件良好的情況下較好,否則欠佳。應(yīng)用起伏不大的小型自動編碼控制場,檢校精度會受到限制,而布設(shè)高精度的三維控制場成本較高,靈活性較差。基于二維和三維控制場的PTR方法的量測應(yīng)用精度跟光束法相當(dāng),且由于它分別在二維和三維控制場中解算相機(jī)畸變系數(shù)和內(nèi)方位元素,采用分步檢校逐次趨近的方法進(jìn)行解算,可以有效地減弱解算參數(shù)之間的相關(guān)性,穩(wěn)定性較好。與光束法和PTR相比,基于二維控制場的張正友相機(jī)標(biāo)定方法精度略低,且穩(wěn)定性受像片數(shù)量和姿態(tài)的影響較大。但此方法整個標(biāo)定過程僅需要電腦上顯示的棋盤格圖像作為標(biāo)定板,操作簡單,攜帶方便,可做到靈活標(biāo)定,大部分用戶都可以利用此方法完成相機(jī)的檢校,且可以滿足中低精度要求的測繪應(yīng)用需求。總之,在實際應(yīng)用中,還需結(jié)合不同的工作環(huán)境、成本和精度需求等因素來合理選擇相機(jī)檢校方法。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56