影響REDUCT慣性定位系統的測量精度因素分析
2020-07-31 09:31:55孫冬進
現代信息科技 2020年4期


摘 ?要:地下管線三維軌跡慣性定位是一種抗干擾能力強、定位精度高的地下管線定位技術。該文通過對REDUCT公司的兩款慣性定位系統進行實驗,定量分析了里程儀的誤差及慣性定位系統的運動速度對其測量精度的影響,為今后工程實踐提供了寶貴經驗,為持續改善和提高地下管線三維軌跡慣性定位系統精度理清了思路。
關鍵詞:慣性定位;一組測量;輪組修正比;彌散度
中圖分類號:TU990.3;TN96 ? ? 文獻標識碼:A 文章編號:2096-4706(2020)04-0057-05
Abstract:The three-dimensional trajectory inertial positioning of underground pipelines is a kind of positioning technology with strong anti-interference ability and high positioning accuracy. Based on the experiments of two inertial positioning systems of REDUCT Company,this paper quantitatively analyses the error of odometer and the influence of the motion speed of inertial positioning system on its measurement accuracy,provides valuable experience for future engineering practice,and clears up the train of thought for continuously improving and improving the accuracy of three-dimensional inertial positioning system for underground pipelines.
Keywords:inertial positioning;a set of measurements;wheel set correction ratio;dispersion
0 ?引 ?言
隨著城市規模的不斷擴大,城市地下管線日趨復雜。近年來,城市化的進程的加快,道路的管線不斷敷設,主干道路的地下空間日趨飽和。非開挖施工方式(尤其是水平定向鉆HDD施工技術)的引進,對階段性緩解城市地下管線敷設難有一定的幫助。此種技術敷設的管道一般埋深較深(3~30 m),很大程度上拓展了城市地下管線敷設的空間,但是同時帶來了敷設管道位置探測難的問題。傳統的探測手段受到地磁干擾、地面限制、埋深過深等諸多因素的影響,無法提供敷設管道精確的三維軌跡,給日后的地下空間的規劃與利用帶來不少麻煩。2009年國網上海電力公司引進比利時REDUCT公司慣性定位儀進行非開挖施工的電力管道的三維軌跡探測,取得了一定的成效,近年來逐步推廣至燃氣、自來水、航油等長輸管道中。然而REDUCT慣性定位系統的誤差究竟如何呢?近年來,也有不少用戶進行了相關的驗證,然而對影響REDUCT慣性定位系統的誤差的因素分析甚少,本文從慣性定位儀的基本原理入手,通過一定的實驗來分析測量時間與里程儀的精度對REDUCT慣性定位儀精度的影響。
1 ?REDUCT慣性定位系統工作原理
如圖1、圖2所示,REDUCT慣性定位系統主要由數據處理單元、慣性測量單元(加速度計、陀螺儀)、外部控制器、供電系統、輪組等部分組成。
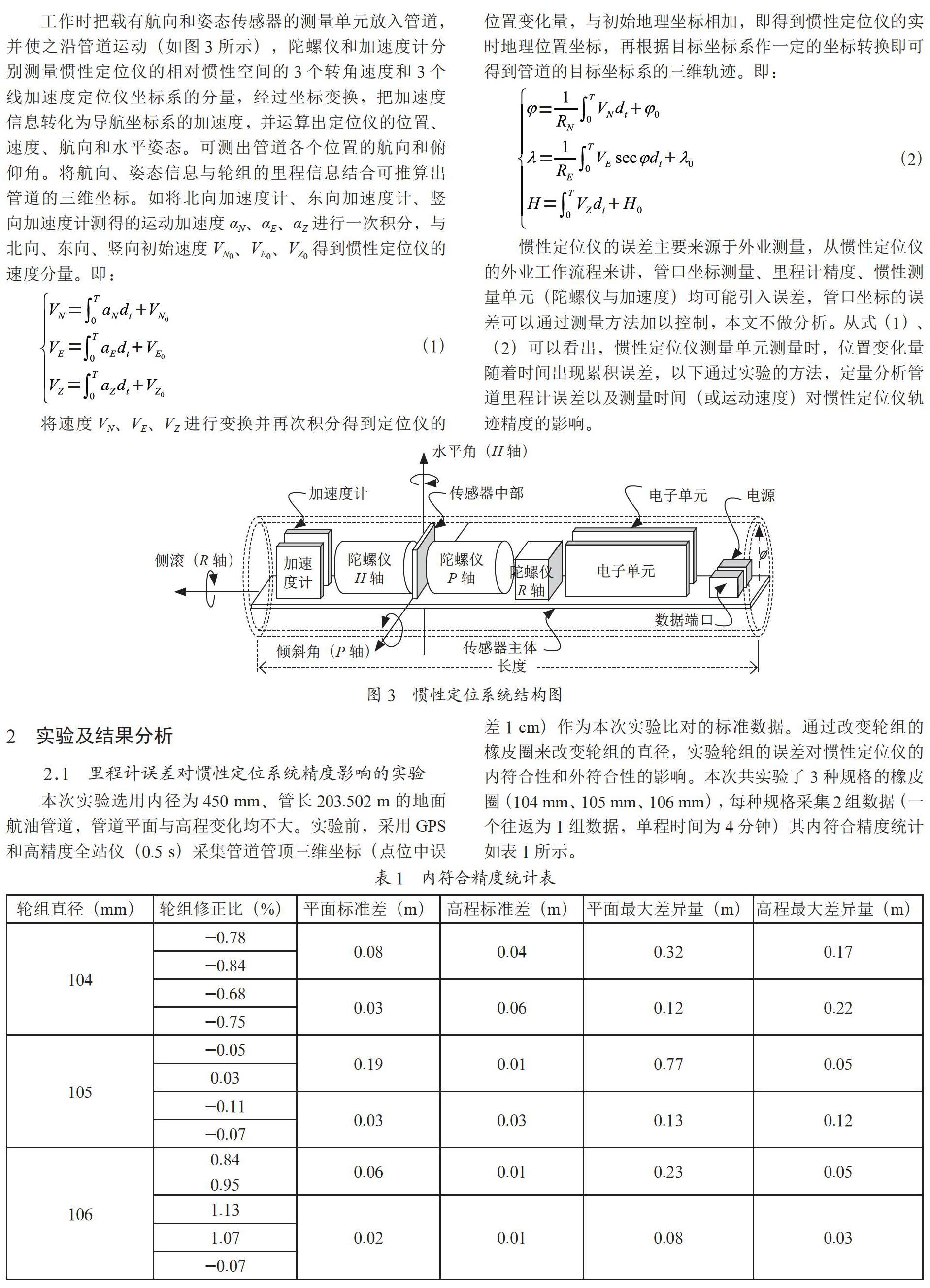
工作時把載有航向和姿態傳感器的測量單元放入管道,并使之沿管道運動(如圖3所示),陀螺儀和加速度計分別測量慣性定位儀的相對慣性空間的3個轉角速度和3個線加速度定位儀坐標系的分量,經過坐標變換,把加速度信息轉化為導航坐標系的加速度,并運算出定位儀的位置、速度、航向和水平姿態。可測出管道各個位置的航向和俯仰角。將航向、姿態信息與輪組的里程信息結合可推算出管道的三維坐標。如將北向加速度計、東向加速度計、豎向加速度計測得的運動加速度αN、αE、αZ進行一次積分,與北向、東向、豎向初始速度VN0、VE0、VZ0得到慣性定位儀的速度分量。即:
慣性定位儀的誤差主要來源于外業測量,從慣性定位儀的外業工作流程來講,管口坐標測量、里程計精度、慣性測量單元(陀螺儀與加速度)均可能引入誤差,管口坐標的誤差可以通過測量方法加以控制,本文不做分析。從式(1)、(2)可以看出,慣性定位儀測量單元測量時,位置變化量隨著時間出現累積誤差,以下通過實驗的方法,定量分析管道里程計誤差以及測量時間(或運動速度)對慣性定位儀軌跡精度的影響。
2 ?實驗及結果分析
2.1 ?里程計誤差對慣性定位系統精度影響的實驗
本次實驗選用內徑為450 mm、管長203.502 m的地面航油管道,管道平面與高程變化均不大。實驗前,采用GPS和高精度全站儀(0.5 s)采集管道管頂三維坐標(點位中誤差1 cm)作為本次實驗比對的標準數據。通過改變輪組的橡皮圈來改變輪組的直徑,實驗輪組的誤差對慣性定位儀的內符合性和外符合性的影響。本次共實驗了3種規格的橡皮圈(104 mm、105 mm、106 mm),每種規格采集2組數據(一個往返為1組數據,單程時間為4分鐘)其內符合精度統計如表1所示。
REDUCT慣性定位系統通常用輪組修正比、平面標準差(軟件稱平面彌散度,在標準差后加%)、高程標準差(軟件稱高程彌散度,在標準差后加%)、平面最大差異量、高程最大差異量來表示其內符合性精度,關于以上指標的公式和定義如下:
從表1可以看出,105 mm是該輪組在系統內標準值,在不考慮其他因素影響的情況下,輪組半徑小于標準值,長度修正比為負,且越小,長度修正比的絕對值越大,并呈現出線性關系,但對其他參數沒有明顯的影響。將三組數據分別以1 m采用間隔輸出,跟全站儀測得管道的軌跡進行比對,得到其外符合精度,具體精度指標如表2所示。
從表2中可以看出,輪組直徑的改變對平面中誤差、高程中誤差、平面最大差異量影響沒有規律性,但對高程最大差異量影響較大。輪組直徑為105 mm時,高程中誤差與最大差異量均比較接近標準值。三種輪組直徑高程曲線圖如圖4所示,從圖中可以看出,在改變輪組的直徑時,其高程的變化比較明顯,104~106雖然輪組僅僅變化2 mm,但實際高程影響約0.15 m,根據實際項目驗證,其影響跟管線的埋設深度和管長成正比。由于定向鉆施工時,平面的曲線變化一般要小于高程曲線變化,所以輪組修正比對平面的影響相對較小。對于非開挖施工的長輸管線(埋深較深,長度較長),要特別注意輪組直徑,建議輪組的直徑與標準值誤差小0.5 mm,否則需更換輪圈或者對輪組直徑值進行修正,減少輪組本身誤差對測量精度的影響。
2.2 ?運動速度對慣性定位系統精度影響的實驗
本次實驗用DR-HDD-4.2在實驗管道內分別以2 min、4 min、8 min、12 min的測量時間測量管道的軌跡,另外一套ADM-90以2 min、4 min、8 min的速度采集數據,共計采集了12組數據。以上數據采集均采用卷揚機進行牽引,速度較為勻速,實驗數據的內符合精度統計如表3所示。
從表3可以看出,速度對高程的內符合性精度基本沒有影響(從高程的標準差和最大差異量來看),對平面的影響還是比較顯著的。2分鐘、4分鐘的數據達到儀器標稱的內符合性精度(平面標準差0.25 m,高程標準差0.1m),8分鐘、12分鐘的數據僅有ADM-90有一組數據達到儀器的標稱的內符合性精度,可以基本得出速度越快(即時間越短),內符合性的概率越大。將以上數據按照1 m采用間隔輸出數據,得到其外符合性精度,具體精度統計如表4所示。
從表4、圖5、圖6可以看出,速度越快,其外符合性精度越好,其結果在儀器標稱精度范圍內,速度越慢精度越差,雖然ADM-90有一組8分鐘數據內符合性精度滿足限差,但是其外符合性精度較差(平面標準差0.333 m、平面最大偏差1.08 7 m超出儀器限差);綜合以上多組數據可以得出,速度越快,內符合性概率越大,外符合性精度達到標稱精度,但速度過快,儀器在管道中的振動加劇,同樣會影響慣性定位儀的精度;速度低于0.5 m/s,儀器數據會有異常,內符合性精度的置信度降低,外符合精度超限;速度大于0.5 m/s,內符合精度滿足要求的情況,其內外符合精度在標稱精度范圍內;同時可以發現DR-HDD-4.2數據質量明顯好ADM-90(限制300 m),這說明儀器本身的關鍵部件的精度對其內外符合精度還是有較大的影響。這在平時項目實施過程中也已經得到驗證,在此不展開。
3 ?結 ?論
本文通過一系列的實驗,從里程儀的誤差和慣性定位系統運動速度兩方面詳細分析對REDUCT慣性定位系統的精度影響,為今后慣性定位系統在管線中應用(尤其非開挖長輸管線)提供寶貴經驗,為提高慣性定位系統測量精度理清了思路。
通過實驗得出如下結論:(1)輪組的精度對管道長度有直接影響,根據輪組的大小不同,輪組直徑與標準直徑每差1 mm,每100 m影響管道長度1~2 m,建議將輪組的直徑與標準直徑值誤差控制在0.5 mm之內;(2)輪組直徑對慣性定位儀的內符合精度基本沒有影響,對平面曲線較小的管道的平面精度影響較小,但對高程的影響是直接的,其影響程度隨管道的埋度和長度呈比例放大;(3)排除輪組在管道內空轉或者打滑的情況,輪組直徑小于標準值時,其修正比為負數,反之為正數;(4)慣性定位儀在管道中的運動速度越快,其內符合性精度和外符合精度均越高(儀器限定最大速度范圍內),運動速度慢(小于0.5 m/s),內符合精度符合的概率與置信度均降低,即便內符合性精度符合標準,其外符合性精度也較差,建議慣性定位儀在管道中的運行速度不低于0.5 m/s,最好控制在0.7~1.5 m/s之間。
目前地下管線三維軌跡慣性定位系統均是基于約束兩端管口坐標的方式,缺少外符合性精度檢測與評估,只能通過內符合性精度來代替外符性精度,存在一定的缺陷。隨著慣導技術的發展,未來一定會有基于單點實時導航的地下管線三維軌跡定位系統出現,管線的另外一端可以作為外符合精度檢核。
參考文獻:
[1] 吳廬山.基于地下管線軌跡測量系統的光纖陀螺振動特性研究 [D].上海:上海工程技術大學,2015.
[2] 甄兆聰.REDUCT慣性定位系統在地下管線測量中的應用 [J].勘察科學技術,2018(2):47-50+64.
[3] 陳亮.慣性陀螺定位技術與可視化驗管工藝在管線探測中的應用 [J].中國煤炭地質,2017,29(7):75-79.
作者簡介:孫冬進(1979.07-),男,漢族,江蘇泰州人,本科,畢業于江蘇海洋大學(淮海工學院),工程師,注冊測繪師,研究方向:工程測量。