港口碼頭前沿基床沖刷檢測方法分析與防護
2020-08-04 07:04:12史青法李富會
港工技術 2020年4期
史青法,李富會
(天津市陸海測繪有限公司,天津 300304)
引 言
港口的生產發展與泊位碼頭的建設密不可分。碼頭是港口供輪船或渡船停泊、乘客上下、貨物裝卸而修建的建筑物[1]。一些企業只為了追求效益而忽略了碼頭本身的安全性,不注重防護,最終釀成碼頭因年久失修而坍塌的安全事故。因此,水下建筑物的安全對港口企業的發展生產至關重要。
沖刷是水流對海底地形的一種侵蝕過程,泥沙隨著水流的移動而移動。沖刷的方式主要分為三類:自然演變沖刷、一般沖刷、局部沖刷[2]。碼頭前沿沖刷主要是由水流受阻而形成的水流漩渦劇烈淘涮碼頭根部泥沙,最終形成局部的沖刷坑。碼頭前沿強勁水流的形成主要有兩方面原因,一是自然的潮流形成;二是貨輪、拖輪離靠泊時大功率螺旋槳的攪動而形成。為了防止碼頭結構因沖刷而穩定性受損、結構強度降低,給港口安全生產帶來隱患,研究港口碼頭沖刷檢測具有重大意義。本文以唐山港京唐港區碼頭基床檢測工程為例,通過多年多波束檢測數據的積累說明碼頭基床檢測、防護的必要性和迫切性。
1 檢測方法分析
1.1 檢測方法
水工建筑物、構筑物的檢測方法多種多樣,常用的主要有潛水員檢測法、ROV檢測法、水下激光掃描法和聲波檢測法等,其中聲波檢測法又包括單波束檢測、多波束檢測、側掃聲吶檢測等。下面就以上檢測方法的原理、優劣性以及適用性進行簡單分析探討。
1)潛水員檢測法,又稱人工檢測,需要潛水員攜帶潛水設備和水下定位信標以及照明和攝像設備潛入待檢測區域,對檢測范圍內的海底地貌情況、礙航物位置及大小、海底構筑物或建筑物的異常區域等進行定位描述和攝像取證,全過程以目測為主,檢測結果相對較為切實準確。但該方法也存在一定的局限性,檢測效率不高,對檢測水質、水深、海況要求較高,且每次潛水時間不能太久,且不能得出檢測點的絕對深度和準確位置。
2)ROV檢測法,ROV又稱水下機器人,可搭載多種聲學檢測設備以及定位設備等,可以獲取水下地形地貌的情況、礙航物或可疑物的準確位置、大小等信息,并完成各種水下施工作業任務。ROV檢測技術日趨成熟,對海況要求不算太高,局部作業效率高,可搭載多種作業設備。而它的局限性則是不能準確獲取絕對深度,大面積作業效率低,對水的能見度要求較高。
3)水下激光掃描法,是利用水的后向散射光強相對中心軸迅速減小的原理從而獲取水下點云數據的方法進行水下成像,它可搭載在 ROV上,進行水下航行掃描,目前該方法已經被應用于多種工程中,然而該方法對水質要求較高,渾濁的水體激光傳播的距離會受到較大的影響,檢測效率較低,僅適合小范圍局部檢測。
4)聲波檢測法是利用聲波在體水中的傳播對待檢測物體進行檢測一種方法,該方法受水體環境影響較小,作業效率和檢測精度較高。單波束和多波束檢測均可以獲取絕對深度和準確的位置。側掃聲納系統適合大面積的掃測,它的掃測精度相對較低,不適合用于碼頭測量檢測。
針對不同的檢測對象可選擇不同的檢測方法,采用先進的、科學的檢測手段能夠及時有效的掌握水下結構物的病害,從而提高檢測效率和質量,確保構筑物的安全。對于港口碼頭前沿基床的檢測,采用潛水員、ROV攝像檢測法和水下激光檢測法很顯然效率和絕對精度都無法得到有效的保障,但對于聲波檢測法無疑是高效的,且檢測質量也有足夠的保證。目前,業內使用的聲波檢測設備主要包括多波束測量設備和三維掃描聲吶設備等。在京唐港區碼頭前沿基床檢測中使用多波束測量設備對其進行檢測,其他方法不再贅述。
1.2 多波束檢測誤差來源
多波束測深系統主要包括測深換能器、GNSS定位儀、姿態傳感器、聲速儀、潮汐測量設備和其他設備[3]。由此可見,多波束測深系統是由多種傳感器集成的一個復雜系統,每一個設備對檢測精度都承擔著非常重要的作用,所以檢測數據誤差來源具有多源性的特點。
1)噪音的影響誤差
任何機械設備只要開機運轉都會存在一定的噪音,只是控制在一定范圍內而不影響結果,超出控制范圍的噪音會直接干擾數據結果,多波束測深設備自身噪音(電子噪音、機械噪音、流噪音)、海洋環境噪音(潮汐、水流、海浪、其他船只、海洋生物)以及測量船船舶噪音(船舶發動機、螺旋槳)均會對檢測結果造成一定的粗差,亦可稱之為假信號,如圖4。此外,這些假信號中也包含了由于軟件參數設置不合適而引起的異常數據,這些假信號將會在后期經過人工干預或軟件自動計算進行剔除。減小噪音的最實用方法就是選擇遠離船舶發動機并避開船底流氣泡的位置安裝換能器,系統自身噪音一般無法避免。

圖1 噪音對測深信號的影響示例
2)設備安裝校正誤差
多波束測深系統結構復雜,安裝時有著嚴格的要求。多波束的安裝方式可分為船舷安裝、船底安裝和豎井安裝。無論是哪種安裝方式各傳感器安裝時都無法達到理論設計的要求,均會存在一定的安裝偏差,如圖2所示。而這些偏差直接影響著測量結果的精度,因此需要對系統進行校正以消除或減小這些偏差,主要包括 GPS 時延(Latency)、橫搖(Roll)、縱搖(Pitch)和艏向(Yaw)的誤差校正。
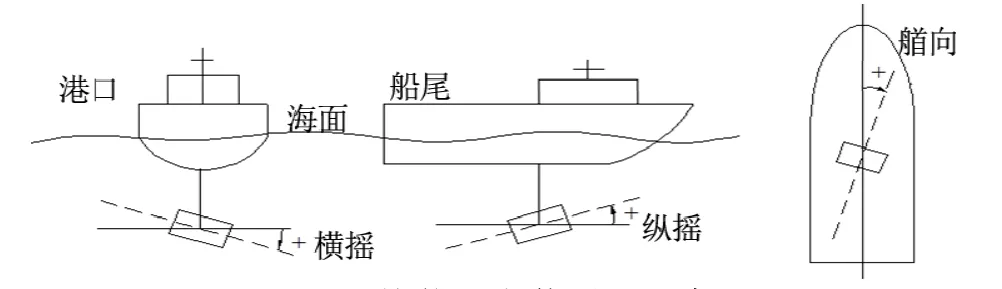
圖2 換能器安裝誤差示意
誤差校正方法:
①時延(Latency)校正,選取一海底特征物或特征地形布設一條測線,以正常測量速度往返通過特征物O,通過兩次測得的特征物位置A和A′以及船速v進行時延誤差t的測定,計算公式為t=L/2v。如圖 3所示。
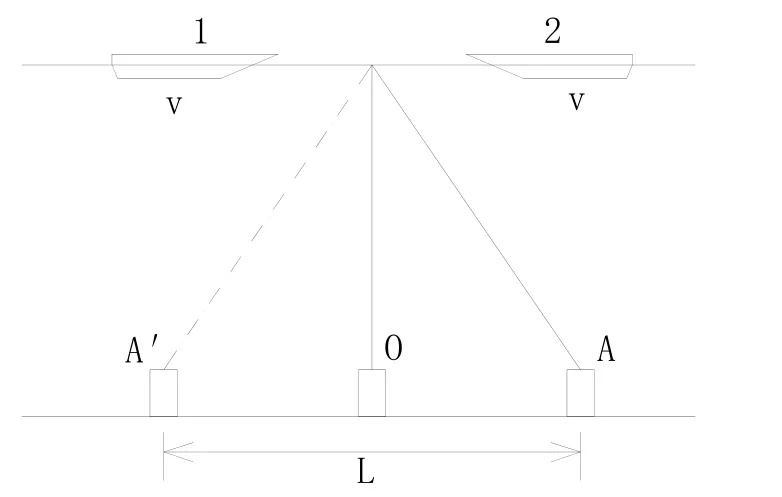
圖3 時延測定示意
②橫搖(Roll)誤差的校正,選取約20 m的平坦海底布設一條測線,測量船按照相同速度在測線上往返行駛,測量海底面的夾角θ等于2倍的換能器橫向安裝偏差,根據測線同一橫斷面上相同位置的水深差值進行比較,計算出橫搖安裝偏差,計算公式為θ= arctan(△h/l)。如圖4所示。
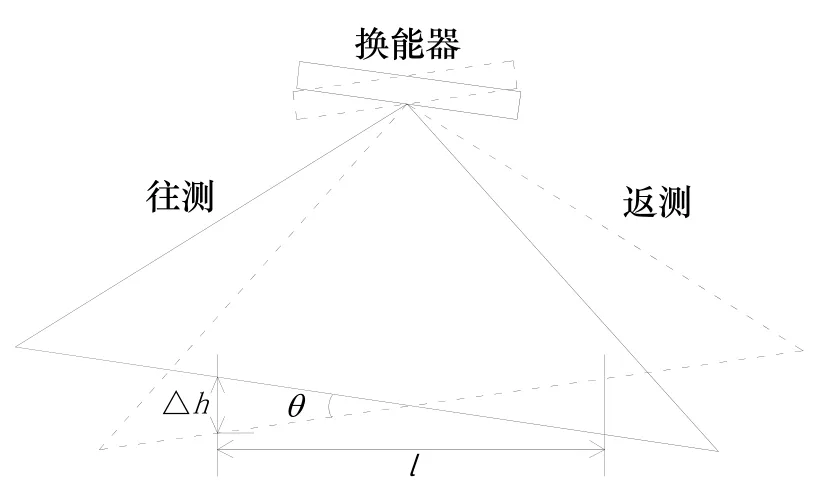
圖4 橫搖誤差測定示意
③縱搖(Pitch)誤差校正,選取一斜坡或特征物垂直等深線布設一條測線,正常測量速度往返行駛(1和2方向)獲取測量數據,H表示深度,O點位斜坡的真實位置,P和P′為兩次測量獲取的斜坡位置,△S為 P至 P′之間的距離,縱搖偏差α的計算公式為α= arctan(△S/2H)。如圖5所示。
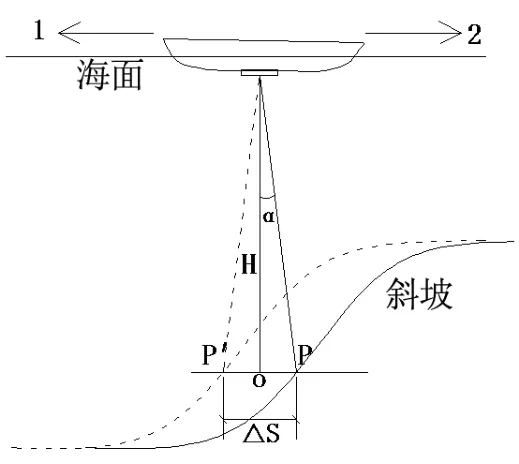
圖5 縱搖偏差測定示意
④艏搖(Yaw)誤差校正,選擇一處海底特征物為中心在兩側各布設一條測線,同速同向(反向)進行數據獲取,A、C位置均為測量獲取的特征物位移位置,B點為特征物真實的位置。l為兩位移位置之間測距離,d為測線寬度,艏搖偏差的計算公式為β=arctan(l/d)。
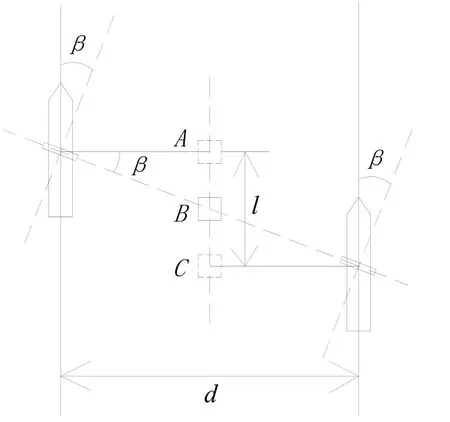
圖6 艏搖誤差測定示意
經過以上方法對換能器安裝偏差校正完成后,部分數據由于受到外因的影響而不能很好的擬合在一起,由于系統校正引起的條帶拼接誤差,將直接影響檢測精度,如圖7所示。
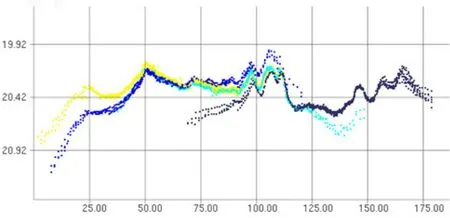
圖7 校準不完善引起的條帶拼接誤差
3)GNSS定位誤差
GNSS定位誤差主要來自三個方面:①衛星部分誤差;②傳播途徑誤差;③信號接收機誤差。衛星部分誤差主要包含星歷誤差、鐘誤差、相位不確定誤差等;傳播途徑誤差包括電離層、對流層的干擾誤差和多路徑誤差,如:在散貨碼頭上均有成排的塔吊機車,在其下方測量時GNSS信號部分將被遮擋,理解為環境導致的定位誤差(無塔吊機車的除外);信號接收機方面的誤差包含接收機噪音誤差以及其他誤差,如:定位天線的豎向投影并不在船體坐標系O點位置,需要對GNSS的安裝位置進行歸算至O點位置,在歸算過程量取偏差值時存在量取誤差。
4)姿態改正誤差
姿態改正誤差主要體現在以下三個方面:①由于姿態本身安裝不牢固,導致和測量平臺的姿態變化不同步,從而測量平臺得不到有效的補償。②由于換能器的安裝不牢固,或由風浪、海流的沖擊影響,導致與測量平臺之間產生顫動,換能器同樣得不到有效的姿態補償,且數據呈“抖動”現象。③由于1PPS的原因,導致換能器數據與姿態數據傳輸存在不規律的時延,從而無法使測量數據得到有效的姿態補償,造成“蝴蝶”效應[3]。
5)聲速改正誤差。
聲波是目前所知的最佳水下傳播形式,聲速測量的目的是為了對測深數據進行聲速改正,確定聲波在水中的傳播方向和路徑。聲速誤差直接影響多波束的測深精度影和波束點的平面位置,尤其對多波束邊緣波束影響更為嚴重,經常導致測深條帶兩邊向上彎曲或向下彎曲的現象。要減弱聲速改正誤差,就要了解測量區域的聲場變化規律,測量出適當時刻、適當密度、高精度的聲速剖面進行聲速改正。
2 工程實例分析
2.1 測區概況
唐山港京唐港區是國家《水運“十三五”發展規劃》重要港口,集綠色港口、智慧港口、多式聯運港口三個交通運輸部示范工程于一身。規劃面積90 km2,其中陸域65 km2,海域25 km2。規劃建設六個港池、五大功能區(集裝箱作業區、液體散貨作業區、干散貨作業區、雜貨作業區、綜合物流區);目前,京唐港區已建成第一、二港池全部和第三、四、五港池部分泊位[4]。本文重點從三港池的26#~27#泊位和工作船泊位進行分析。港區局部如圖8。
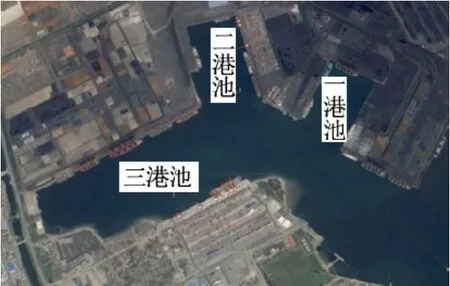
圖8 京唐港局部港池
2.2 GNSS定位誤差解決方案
中國沿海 RBN-DGPS差分臺發出的定位信號在開闊水域進行測繪工作的定位精度完全滿足規范要求。在碼頭基床檢測作業時,采用了RBN-DGPS差分定位技術,隨后發現在碼頭前沿測量時由于受到碼頭岸上集裝箱塔吊機車和散貨抓斗塔吊機車的遮擋影響,出現較大的定位偏差,這將對檢測精度造成很大的影響,直接違背了高精度檢測的初衷。為了減小因定位偏差引起的誤差,檢測作業時采用了高精度的GNSS慣性導航系統對定位偏差進行及時補償,有效的解決了由塔吊機車遮擋引起的定位偏差問題,提高了定位精度。圖9為檢測效果比較,圖9(a)采用普通的DGPS定位技術,受到GNSS信號遮擋后航跡跳變嚴重,定位偏差較大重復測量的碼頭壁時有交叉現象;圖9(b)采用GNSS慣性導航系統,定位信號得到有效的補償,重復檢測時碼頭壁疊加效果較好。
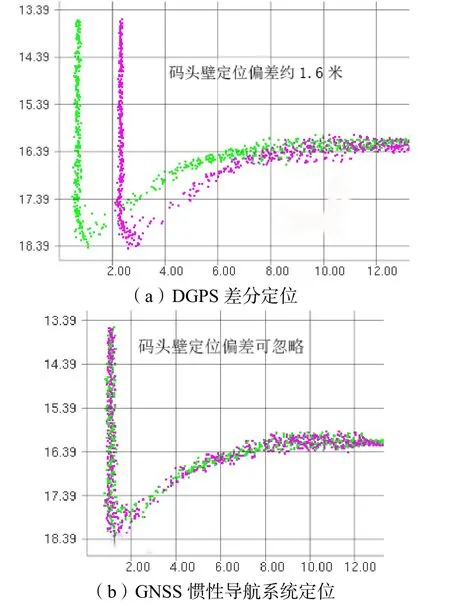
圖9 由塔吊機車遮擋引起的定位誤差比較
2.3 基床沖刷比較分析
本文檢測分析的沖刷碼頭均位于三港池內,26#~27#泊位位于南岸,設計深度15.5 m,為集裝箱碼頭,供集裝箱船舶停靠;工作船泊位位于西岸,設計深度為13.0 m,主要供大功率引水拖輪停靠。該碼頭均為地下連續墻結構,該結構在粘性土、沙土等軟土層地下工程中應用較多,且可承受很大的土壓力,很少發生坍塌事故,但也不是永固不朽。
三港池地處京唐港區內部,受海底流影響較小,不容易形成碼頭基床深坑。根據多年檢測數據分析,碼頭前沿形成深坑的原因主要是由局部強勁水流沖刷而成,這種強勁水流主要來源于船舶停靠或離泊時側推螺旋槳動力,水流受阻后形成側豎向或豎向回旋流,碼頭基床常年受該水流的沖刷而形成深坑,泥沙隨著水流上升并沉積于沖刷坑附近的海底面,隨著沖刷坑越深則碼頭的安全系數逐漸降低。
自2013年至2017年間對上述兩處碼頭前沿基床進行逐年檢測,發現前沿基床已沖刷嚴重,且有逐年加深加寬的跡象。三港池工作船泊位自2013年建成至2015年期間沖刷最為嚴重,沖刷深度約達3.5 m,距碼頭壁10~40 m之間回淤最為嚴重,最大回淤高度約0.9 m,明顯已不滿足設計深度要求,2015年至2017年檢測發現沖刷基本趨于穩定(見圖10),未見擴大跡象。26#~27#泊位于2014年建成,2015年檢測發現碼頭前沿基床深度已達17.7 m,沖刷坑深約2 m,造成基床大面積回淤接近0.5 m,主要回淤在坑上邊緣約10 m之內;2016年和2017年沖刷寬度有較大增加且有逐年增大趨勢,深度與2015年持平,前沿水深最前為15.2 m,也已不能滿足設計深度要求(見圖11)。
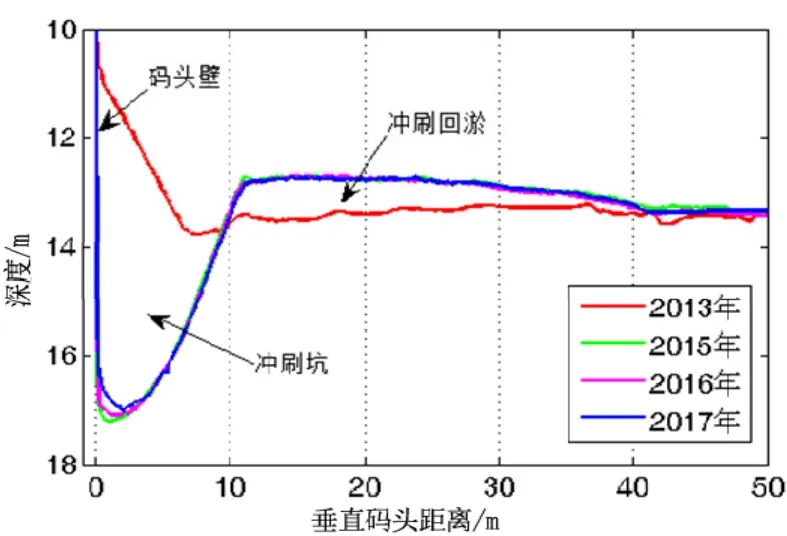
圖10 工作船碼頭基床局部沖刷斷面
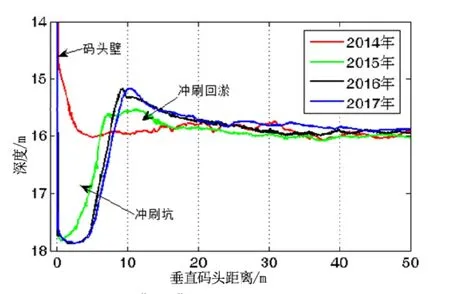
圖11 26#~27#碼頭基床局部沖刷斷面
通過以上數據分析,發現基床沖刷后的深度已遠遠超過了泊位設計的0.5 m的超深深度。建議對這種存在沖刷現象的碼頭基床做必要的防護,防止情況嚴重惡化出現事故而影響港口建設和生產。
3 沖刷防護
沖刷防護一般分為主動防護和被動防護。主動防護是由人為行為改變水流方向及其狀態,達到減弱水流沖刷的目的。被動防護是在其沖刷區域布設碎石塊及混凝土連鎖排等提高基床的抗侵蝕能力。這種被動防護法在很多的防護工程中已廣泛應用,如海底管道防護、橋墩防護等。其特點是取材方便、成本低廉、工藝簡單、操作靈活[5]。
基于碼頭基床現狀提出以下兩點防護建議,建議一:在碼頭基床沖刷坑內拋擲碎石,粗糙的石塊可以一定程度上減緩水流的流速,降低水流帶走泥沙的能力,可以有效的遏制水流對碼頭基床的沖刷。建議二:在碼頭基床沖刷坑內拋下粗砂袋,然后在其表層布設水泥連鎖排,連鎖排也可以有效的減緩水流沖刷力,對易被沖刷的基床起到一定的保護作用。另,注意防護層的高度不可淺于泊位的設計深度值,以防發生船舶擱淺或觸底事故。
4 結 語
通過多年數據積累分析,證實了對碼頭前沿基床進行年度沖刷檢測和防護的必要性,是對港口建設和安全生產的一種有力保障。建議對以上沖刷坑盡早進行防護處理,基于碼頭現狀文章給出了防護建議,不滿足于設計深度的區域及時采取疏浚措施,保證碼頭生產安全和通航安全。文章討論的內容以及檢測方法對港口碼頭建設以及港口安全生產具有重要意義。該檢測方法亦可用于海上風電樁基、石油平臺樁基、跨海橋梁橋墩、水庫淤積檢測等水下檢測項目。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12