基于參考信號的TDOA 定位技術研究
2020-08-05 06:59:20高俊浩
數字通信世界 2020年7期
高俊浩,郭 敏,陳 奎,屠 丹
(國家無線電監測中心檢測中心,北京 100041)
0 引言
無線定位技術一直是通信領域的一個研究重點,常見的定位技術有TOA、TDOA、AOA 以及基于智能天線陣列的定位技術等。其中,TDOA定位技術以定位精度高、系統復雜度低等優點在很多監測系統中被采用。TDOA定位的核心算法之一就是計算時間差,常用的計算時間差的方法多以硬件為主,利用高精度的GPS 時鐘模塊對同步采樣的數據進行互相關計算[1]。該方案硬件成本高,定位結果容易受到GPS 信號的強弱以及晶振的穩定性等影響。所以,本文研究了基于參考信號計算時間差的算法,采用該方式的定位可有效降低硬件設計的成本與難度。
1 TDOA 定位模型
1.1 雙曲線模型
TDOA 定位方法中參與定位的設備至少需要3 臺,本文設計的實驗中使用了3臺設備進行定位。TDOA 定位的雙曲線模型[2]如圖1所示,記待定位的發射源為D,對應坐標為(XD,YD)。記參與定位的三臺設備為C1,C2,C3,對應的 坐 標 分別 為(XC1,XC1),(XC2,XC2),(XC3,XC3)。記D 到C1、C2與C3的距 離 分 別dD1、dD2、dD3。由兩點距離公式可得式(1)、(2)、(3)。


記D 與C1、C2的距離差為D12,D 與C1、C3的距離差為D13,D 與C2、C3的距離差為D23。根據雙曲線定義,可以得到一條以C1、C2為焦點,以D12為焦距的雙曲線,如圖1中虛線所示。同理可以得到以C1與C3、C2與C3為焦點的雙曲線,分別如圖1中點劃線與實線所示。通過確定多條雙曲線的交點,便可確定D 點的坐標。

圖1 TDOA雙曲線模型
1.2 算法模型
對于TDOA 的位置計算常用的算法有Fang 算法、Chan 算法以及泰勒級數展開,在文獻[2]中對于每種算法進行了詳細的公式推導與仿真分析。這三種算法各有優缺點:Fang 算法通過消元的方式得到特征方程的兩個根,通常需要根據基站的實際覆蓋半徑與定位位置去剔除一個虛解,該算法通常用在基站與終端的公網定位當中;Chan 算法與Fang 算法相似,也需要剔除虛解,并且該算法對測量誤差敏感,在建筑密集的城市間不能保證很好的定位精度;泰勒級數展開的算法主要是采用逐次迭代的方式完成定位,通過初值的選取,逐次迭代去逼近實際的位置,該方法定位在非視距的環境中也能保證相對較高的定位精度,試用場景也更廣。
2 TDOA 定位分析
TDOA 算法的核心模塊是時間差計算與位置計算,時間差的計算依賴于同步采樣的數據,所以同步是時間差計算的核心,同步誤差的大小將直接影響后續位置計算的精度。下面主要對時間差的計算方法進行介紹分析。
2.1 參考定位模型
采用參考信號進行定位的方法如圖2所示。三臺定位設備分別為C1、C2、C3,其中,S 為已知的參考信號,D 為需要定位的未知信號。一般采用硬件GPS 的定位模型是由圖中實線連接的設備組成,只包括三臺定位設備。定位流程是由定位設備直接對未知信號D 進行定位,該方式需要各定位設備具備高精度的時鐘,通過獲取GPS的時間完成指令同步,通過脈沖控制完成同步采樣,對硬件要求較高。采用參考信號的定位模型是在原有定位模型的基礎上添加參考源,如圖2中虛線連接的S 信號。與采用硬件GPS 的定位方式相比,最直觀的不同點是多了一個參考信號,但各定位設備的內部硬件設計更加簡單。采用參考信號進行定位時,定位的發起信號可以采用系統的時間,即在指定的同一時刻開始進行信號的采集。采用此時間觸發時首先需要對各定位設備的系統時間進行網絡同步,同步的目的是將各定位設備的時間誤差降低到最小,該誤差在可以補償的范圍之內。然后根據定位觸發信號完成對S 信號與D 信號的信息采集,最后通過兩次時間差計算完成對未知信號D 的定位。參考信號的主要作用就是根據其與各定位設備的已知位置關系完成對系統誤差的補償。
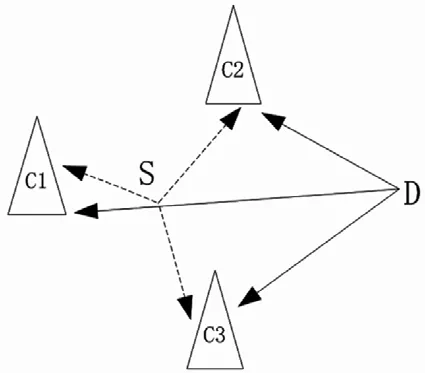
圖2 定位模式
2.2 軟件算法流程
TDOA 定位中對時間計算需要進行多次相關。時間計算的軟件算法流程如圖3所示,圖中只給出了一組定位客戶端對時間的計算關系。選取定位設備C1與C2進行射頻數據的采集,每臺客戶端采集的數據包括兩部分內容,一部分是參考信號S 的數據,另一部分是未知信號D 的數據。其中數據的采集是在同一射頻通路下順序完成的,即先獲取S 信號,緊接著獲取D 信號,然后將兩組數據分別存儲處理。為了減小時間計算的誤差需要對數據進行上采樣,對C1與C2同步采集的S 數據進行相關計算可以得到C1與C2對參考信號S 的時間差,記為Δs12。結合Δs12,C1與C2通過對上采樣的D 信號再次進行相關計算得到時間差,記為Δd12該時間差代表C1與C2對D 信號的到達時間差,至此完成了一組時間差的計算。同理可得到另兩組到達時間差。

圖3 軟件計算流程
2.3 時間差關系
采樣流程的時間關系如圖4所示,整個時間的處理可以劃分為兩個階段來分析。其中高幅值的正弦波代表第一階段采集的S 信號,低幅值的正弦波代表第二階段采集的D 信號。t0時刻觸發采集信號指令,從圖中可以看出三臺定位設備對S 信號的采集并不一定是同步開始的。原因是由兩部分引起的,一是S 到三臺設備的距離不一定相同,二是三臺設備的系統時間也并不一定相同。由于S 與各定位設備的實際距離已知,所以S 到各定位設備的到達時間差為已知,此處仍以C1與C2為例來說明,則該時間差記為Δat12。在2.2小節中通過第一次相關計算可以得到Δst12,該時間差中包含有不確定的系統誤差,記系統誤差為Δmt12。所以將絕對時間差Δat12與相關時間差Δst12相對比可以得到系統誤差。
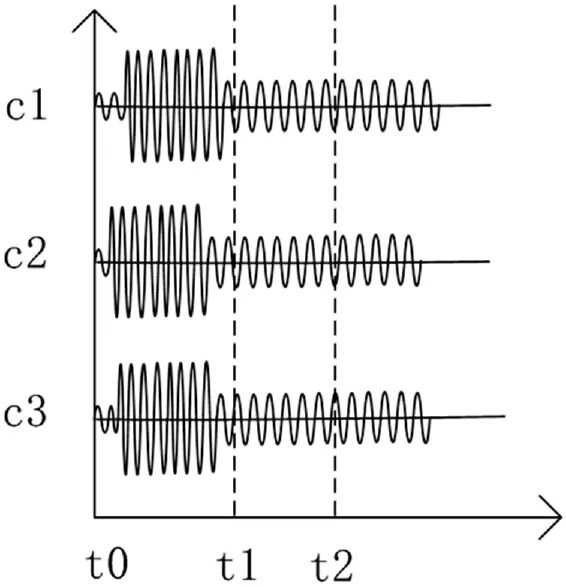
圖4 采樣時間關系
三臺定位設備在第一階段通過互相組合計算可以得到3個時間差,通過互相比較,可以得到最大的滯后時間點t1,時間點t1即D 信號的開始同步采集時刻,根據計算需求確定截止采樣時刻t2,時間點t1與t2截取的數據這樣即為同步采樣的D 信號。由2.2節中所描述,對兩路D 信號進行相關計算可以得到到達時間差Δdt12。該時間差中也包含了第一階段的Δat12與系統誤差Δmt12,所以D 到定位設備C1與C2的實際時間差為公式(4)。其中正號與負號分別代表超前與滯后,具體的符號值需要根據實際的情況確定。

3 定位測試
依據(4)式的時間差便可得到距離差,依據距離差進行位置計算。利用實際部署的設備進行定位測試,本次實驗設置坐標原點為萬壽路地鐵站,選取部署在順義機場、中加大廈以及通州北關的三臺設備進行定位。定位目標為中央電視塔發射的普通調頻廣播信號,定位效果如圖5所示。圖中星形所代表的位置為定位目標點,三條曲線相交的位置即為實際的定位點。其中圖(b)為圖(a)放大后的圖片,從圖中可以看到實際的定位點距離目標點存在著誤差,該誤差在可接受的范圍之內。

圖5 TDOA定位
圖6描述的是不同信噪比對定位精度的影響。橫軸代表信噪比,縱軸代表定位誤差。其中data1代表三臺定位設備的信噪比同時改變時其定位誤差的變化規律,可以看到當信噪比小于3 dB 的時候,定位誤差明顯增加,在情況較差的時候雙曲線無法完成交匯,定位結果也不再具有較大的參考價值。當信噪比在3 dB 到10 dB 之間的時候,雙曲線不能很好的匯聚到一個相對集中的位置,交匯的是一個大概的范圍,定位誤差在一定的范圍內波動。當信噪比大于10 dB 后,定位誤差在一個相對穩定的范圍內。data2代表其中一臺定位設備的信噪比一直大于10 dB、另兩臺定位設備信噪比同時改變時定位誤差的變化規律。data3代表兩臺定位設備信噪比固定,其中一臺變化的情形。從圖6中曲線可以看出,data2與data3的變化規律與data1基本一致。說明在TDOA 定位的時候,所有參與定位的設備采集的信號都應該有較高信噪比,否則會有較大的誤差。
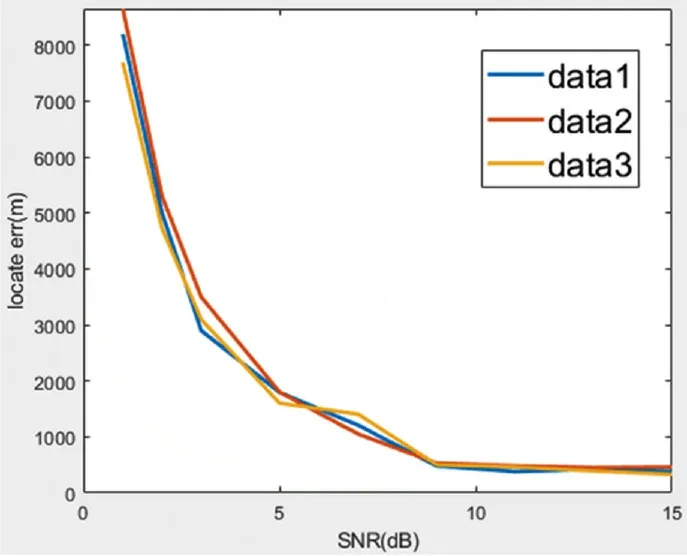
圖6 定位誤差
TDOA 定位的核心是時間同步,同步誤差會帶來定位誤差,而影響同步的因素主要來自兩個方面:一是系統誤差,硬件與軟件都會帶來系統誤差,并且該誤差不可避免,只能考慮將系統誤差的影響降到最低。在實驗的數據采集階段,參考信號與未知信號的采集在同一射頻通路中完成,所以在頻率切換與配置的時候會引入不確定的時間誤差。二是實際應用場景中電磁波的非直射傳播帶來的誤差[3]。在城市的環境中,發射點與接收點之間電磁波多以非直射傳播為主,由于多徑帶來的時延擴展以及衰落會影響相關估計,造成時間計算的誤差。本文實驗中關于時間的計算均假設信號直射傳播,并且進行了多次互相關計算,也增加了定位的誤差。
4 結束語
本文采用參考信號計算時間差的方法進行了TDOA定位,通過對參考信號的時間計算可有效補償系統誤差與完成同步采樣。最后通過實際測試驗證了該算法的可行性,同時對不同信噪比的情況進行了定性分析。該定位方式可有效降低硬件設計的成本與難度,并取得較好的定位效果。同時,本文的實驗中也存在一些不足,從實際的定位效果看,依舊存在明顯的誤差,實驗中沒有考慮信號非直射傳播的因素,在今后的工作中需要對該定位誤差繼續進行研究。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
