基于數據挖掘的交通監控信息融合技術研究
2020-08-07 05:50:31薛大暄劉金剛
現代電子技術 2020年13期
關鍵詞:數據挖掘
薛大暄 劉金剛

摘? 要: 為了降低交通監控系統中單一傳感器的誤報率和漏報率,提出基于數據挖掘的交通監控信息融合技術。在監控環境中安裝并配準視覺交通監控設備,通過對交通監控系統的視頻攝像等多視角傳感器的數據挖掘與集成,提取監控目標的信息特征。以提取的特征結果為基礎,通過目標匹配及相同目標數據融合兩個步驟得出交通監控的信息融合結果。經過對比實驗得出結論:與傳統信息融合技術相比,將設計的交通監控信息融合技術應用到監控系統中有效地降低了誤報率和漏報率。
關鍵詞: 數據挖掘; 交通監控; 監控信息; 信息融合; 信息處理技術; 監控精度
中圖分類號: TN948.64?34; TP277? ? ? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)13?0088?04
Research on traffic monitoring information fusion technology based on data mining
XUE Daxuan, LIU Jingang
(Information Engineering College, Capital Normal University, Beijing 100048, China)
Abstract: A traffic monitoring information fusion technology based on data mining is proposed to reduce the false alarm rate and missing alarm rate of the single sensor in the traffic monitoring system. The visual traffic monitoring equipment is installed and registered in the monitoring environment, and then the information features of monitored targets are extracted by data mining and integration of the multi?perspective sensors like video and camera shooting in the traffic monitoring system. On the basis of the extracted feature results, the information fusion results of traffic monitoring are obtained by the two steps of target matching and data fusion of the same targets. It can be concluded from the contrastive experiments that the application of the proposed traffic monitoring information fusion technology to the monitoring system can effectively reduce the false alarm rate and missing alarm rate in comparison with the traditional information fusion technology.
Keywords: data mining; traffic monitoring; monitoring information; information fusion; information processing technology; monitor accuracy
0? 引? 言
交通是從事旅客和貨物運輸及語言和圖文傳遞的行業,主要可以包括運輸和郵電兩個方面,在當下的國民經濟中可以當作第三產業。按照交通運輸的類型可以將交通分為鐵路、公路、水路、空路和管道五種方式,而當下交通主要指的是日常交通[1]。為了維持交通秩序,中國制定了相關的交通法律,并設置相關的監控系統約束道理交通安全。交通監控主要依賴相關的監控設備運行,設置的監控點主要分布在車流、人流相對集中的道理交叉口和重點路段上,監控設備將采集到的圖像傳輸到道路監控指揮中心,輔助相關的值班人員及時了解各個區域的路面運行狀態。通過對交通監控信息的分析,可以及時調整各路口的車輛流量,確保交通通暢。除此之外,當道路環境中出現交通事故或違章情況,也可以以交通監控的結果為依據,提高公安機關執法辦案的水平及效率。然而單一視角的交通監控設備會由于角度與視線的問題致使監控結果出現偏差,為此需要在交通監控系統中增加硬件設備,并利用相應的信息融合技術來提高監控信息的準確度和精度。
信息融合技術是將多傳感器信息源的數據和信息加以聯合、相關及組合,獲得更為精確的位置估計及身份估計,從而實現對交通環境及其重要程度的實時、完整評價的處理過程[2]。信息融合技術具有冗余性、互補性等特點,同時可以拓展監控的覆蓋范圍、增強交通監控系統的識別能力。傳統的信息融合技術包括加權平均融合技術、最優加權融合技術以及自適應信息融合技術,然而傳統信息融合技術中均存在融合效率低的問題,為此需要利用數據挖掘方法對其進行優化設計。數據挖掘是與計算機技術相關的方法,通常是指從大量的數據中通過特有的算法搜索出隱藏于其中信息的過程。將該方法應用到交通監控信息融合技術當中,可以提升對交通目標的快速搜索,從而提高信息融合技術的實現效率。
1? 交通監控信息融合技術設計
1.1? 安裝與配準視覺交通監控設備
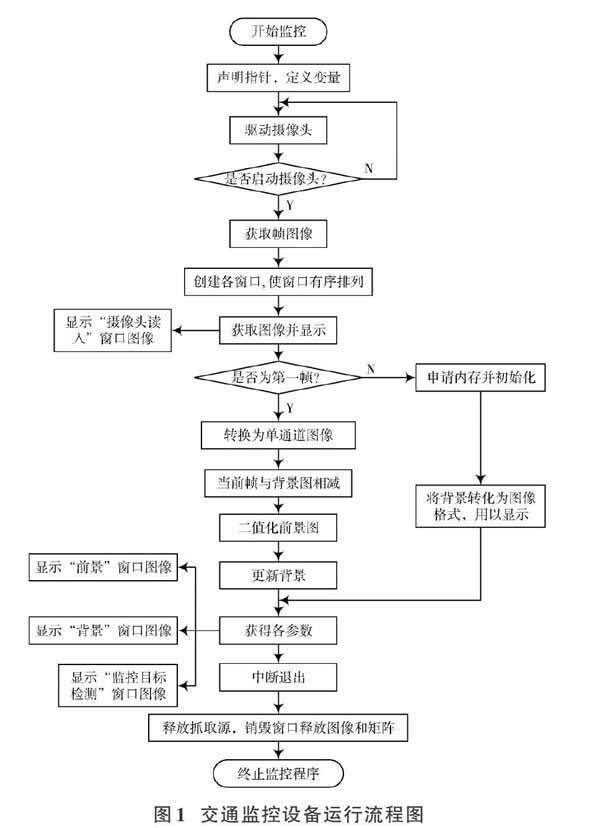
交通監控系統中需要安裝的硬件監控設備包括兩個方面:一個為高清網絡視覺圖像攝像機,主要用來采集交通路面上的實時道路信息[3]。該攝像機可以實現大范圍立體角度內的光譜信息收集、變換、傳輸、處理以及顯示;另一個硬件設備為數字高清網絡硬盤錄像機,除了可以實現小范圍的錄像之外,還可以存儲一定容量的數據。在監控系統中攝像機與傳感器的設置個數在2個以上,實現交通監控的多源數據采集,交通監控設備在實際工作過程中的運行流程如圖1所示。
監控設備安裝完畢后,需要對其進行配準處理,多監控設備的配準是為了獲得無誤差量測轉換信息所采用的數據處理過程,分別從時間和空間兩個方面實現對監控設備以及信息融合相關設備的配準[4]。將采集到的視頻數據與信息存儲到系統數據庫當中,作為信息融合的初始信息數據集。
1.2? 挖掘交通監控信息數據
按照數據挖掘的實現原理,可以將其步驟劃分為:定義問題、建立數據庫、分析數據、準備數據、建立挖掘規則和實施。在此次交通監控信息數據的挖掘中,以視覺交通監控設備采集到的監控圖像信息組成的數據集作為搭建的數據庫[5]。在此基礎上,分析監控數據并剔除掉數據庫中的無效數據。將處理完成的數據庫用[Ii]表示,在一個預先定義的規則[I1?I2]中,規則的前件用[?]前的事務[I1]表示,規則的后件用[?]后的事務[I2]表示。按照規定的關聯規則在交通監控數據庫中挖掘對應的待融合數據。
1.3? 提取監控信息數據特征
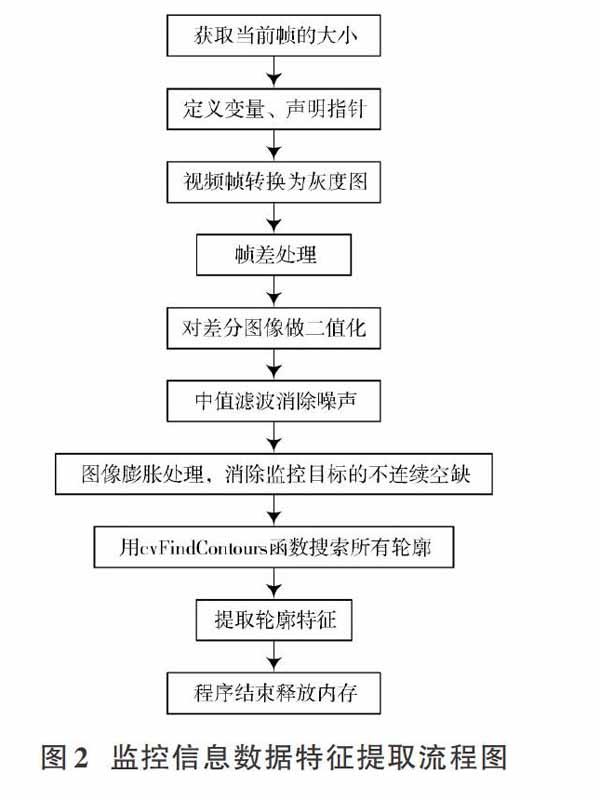
交通路面中無論是車輛還是行人都處于移動的狀態,因此需要將同一個目標的不同角度信息識別出來,再進而實現信息的融合[6]。若要識別交通監控視頻中的目標,首先需要將對應目標的數據特征提取出來,并以此作為標準識別其他角度上的畫面信息。監控信息數據特征的提取過程如圖2所示。
按照圖2中的提取流程實現對交通監控圖像中輪廓特征的提取,在此基礎上通過檢測圖像中的運動物體實現對目標車輛的特征提取[7]。使用的提取方法為運動分割方法,利用當前監控畫面與背景圖像的差分實現對運動目標的檢測。單一監控設備的背景圖像在短時間內固定不變,設當前運動目標的圖像為[G(x,y)],相應的背景圖像用[B(x,y)]表示。比較當前交通監控設備的采集圖像與背景圖像,確定實時監控圖像中各個像素的變化情況,并利用式(1)提取出交通監控圖像的基本運動特征。
式中:[t]為交通監控的時間;[Dt(x,y)]為固定監控設備對應的背景圖像;TH表示像素移動的門限值[8]。綜合輪廓特征與目標運動特征的提取結果,即可得出監控信息數據特征的綜合提取結果。
1.4? 融合多視角交通監控數據
多視角交通監控信息融合技術中,不同角度與位置上的監控設備設置的參數不同,導致采集到的數據可能是實時的或非實時的,同步或者異步的[9]。為此將交通監控數據信息抽象為數據層、特征層和決策層。多視角信息時數據融合的加工對象、協調優化與綜合處理是信息數據融合的核心,為此可以以提取的特征結果為基礎,分別從多個層次方面實現信息數據的融合。具體的數據融合過程如圖3所示。
1.4.1? 目標匹配
目標匹配的目的是識別不同交通監控設備中的同一目標,在當前監控圖像數據集中的圖像[Gt]中,存在特征向量的區域[R(p)]的前景像素定義為[p(x,y)],且另一個監控設備采集的任意一個監控圖像對應的像素定義為[px,y],兩者之間的相似度可以用式(2)計算:
式中參數[N]表示像素的鄰域半徑。除了特征匹配度之外,[T]為距離相似測度函數,表達式為:
式中:[ΔP],[ΔV]與[ΔC]分別表示圖像中的位置變化值、速度變化值以及顏色變化值[10];[α],[β]與[γ]為對應的經驗系數,且三者的參數之和為1。將式(3)的求解結果代入到式(2)中,即可求出不同交通監測設備采集圖像之間的相似度,若相似度高于80%,則判斷為同一目標,可以進行下一步的信息數據融合處理[11]。
1.4.2? 相同目標數據融合
相同目標的所有信息分別從像素層、特征層和決策層三個角度實現數據的融合。其中,像素層是最低層次的融合,直接在交通監控設備采集到的原始觀測信息層上進行融合;特征層融合采集到的信息進行特征分類與分析,并在一定很程度上進行信息壓縮,便于實時處理[12];決策層是在目標匹配的基礎上,建立對所觀察對象的初步結論,接著通過各個交通監控設備關聯進行局部決策層的融合處理,最終獲得交通監控信息融合結果。
2? 對比實驗分析
為了檢測設計的基于數據挖掘的交通監控信息融合技術的應用效果,設計對比實驗,并應用在實際的交通監控系統當中。選擇車流量大的交叉路作為此次對比實驗的研究對象,將具有較高性能的交通監控器按照圖4中的方式安裝在指定的位置上,并調整到工作模式。
在硬件設備安裝并調試完成的情況下,將其連接到交通監控環境中心的主機中,并通過對應的界面顯示出來,其結果如圖5所示。
在此次對比實驗中設置傳統的交通監控信息融合技術作為實驗的對比技術,兩個信息融合技術的實驗環境與相關數據參數相同,以此保證實驗變量的唯一性。分別將兩個交通監控信息融合技術應用到監控環境當中,手動控制交通車流的運行情況,并設置多個交通違規情況。通過監控系統的告警次數證明設計的信息融合技術的應用效果,為了避免實驗偶然性對實驗結果產生的影響,設置多次實驗,以得到準確的實驗結果。經過統計與計算得出實驗對比結果如表1所示。
將實驗檢測結果輸入到第三方統計軟件當中,統計出交通監控結果的漏報率與誤報率。通過計算,傳統交通監控信息融合技術的漏報率為18.3%,誤報率為11.7%;而基于數據挖掘的交通監控信息融合技術的漏報率與誤報率分別為3.3%和1.6%,相比之下分別降低了15%和10.1%。由此可以證明設計的基于數據挖掘的交通監控信息融合技術可以有效地提升交通監控系統的監控精度與準確性。
3? 結? 語
本文以多視角攝像機的交通監控為研究背景,基于數據挖掘的研究策略,提出對應的信息融合方法,即將單個攝像機的信息融合處理和多個攝像機的信息融合處理兩個過程相結合。通過實驗驗證了設計的信息融合技術的有效性,顯著提高了對交通監控目標的監控精度,也較好地對目標的完整狀態進行了描述。然而在實際的運行過程中,監控結果會由于環境的影響而導致信息融合結果產生誤差,因此需要在未來的工作中深入開展研究。
參考文獻
[1] 楊東紅.基于數據挖掘技術的交通事故關聯分析[J].數字技術與應用,2017,13(10):230.
[2] 任偉.基于云計算的物聯網數據挖掘模型研究[J].軟件,2017,38(12):229?232.
[3] 呂瑞,孫林夫.基于多源信息融合故障樹與模糊Petri網的復雜系統故障診斷方法[J].計算機集成制造系統,2017,23(8):1817?1831.
[4] 覃兵文.大數據的分類挖掘優化技術[J].現代電子技術,2017,40(24):34?36.
[5] 高忠文,牛孜飏.基于大數據的交通流量模式分析[J].哈爾濱理工大學學報,2018,23(6):124?127.
[6] 劉春,譚夢茜,邵雄凱,等.基于行車位置數據挖掘的拼車方法研究[J].計算機工程與應用,2017,53(8):76?80.
[7] 李賢鈺,郭忠印,王璐,等.基于D?S證據理論的災后公路交通生命線多源信息融合技術[J].華東交通大學學報,2017,34(3):88?94.
[8] 丁宏飛,秦政,劉博,等.基于AF?SVR的城市快速路多源交通信息融合研究[J].計算機工程與應用,2017,53(5):266?270.
[9] 曾嚴.信息與智能交通控制平臺融合技術分析[J].無線互聯科技,2017,33(9):118?119.
[10] 呂瑞,孫林夫.基于多源信息融合故障樹與模糊Petri網的復雜系統故障診斷方法[J].計算機集成制造系統,2017,23(8):1817?1831.
[11] 周永箏,邱恭安.車聯網中的交通安全信息證據理論融合算法[J].計算機工程與設計,2017,38(4):874?877.
[12] 陸曉,劉翌,齊敬先,等.基于大數據的電網設備監控信息自動分類方法[J].電子設計工程,2019,27(11):119?122.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:10:36
大眾投資指南(2021年35期)2021-02-16 01:06:26
中國交通信息化(2020年1期)2020-07-27 02:50:04
電力與能源(2017年6期)2017-05-14 06:19:37
中國中醫藥信息雜志(2016年7期)2016-12-01 06:07:55
信息通信技術(2015年6期)2015-12-26 01:16:46
西安工程大學學報(2014年2期)2014-02-28 18:03:05
河南科技(2014年23期)2014-02-27 14:18:43
電子設計工程(2014年18期)2014-02-27 12:00:13
電子設計工程(2014年18期)2014-02-27 12:00:12
