RESON Seabat T50-P 多波束系統在水下基坑測量中的應用
2020-08-08 06:48:06劉權
水科學與工程技術 2020年3期
劉 權
(上海浦海測繪有限公司,上海201399)
多波束測深系統是一種多傳感器的復雜組合系統,是現代信號處理技術、高性能計算機技術、高分辨顯示技術、高精度導航定位技術、數字化傳感器技術及其他相關高新技術等多種技術的高度集成。 不同于單波束測深系統, 多波束測深系統可在測量斷面內形成十幾個至上百個測深點, 幾百個甚至上千個回向散射強度數據, 從而保證了較寬的掃幅和較高的測點密度;另一方面,較窄的波束、先進的檢測技術和精密的聲線改正方法的采用, 也確保了測點船體坐標的歸位計算精度, 因而多波束測深具有全覆蓋、高精度、高密度和高效率的特點[1]。 可以說,多波束測深系統的出現, 極大地改良了傳統水深測量的作業方式,在海洋調查中的應用愈發廣泛。
本文以海底地形中的水下基坑為案例, 介紹RESON Seabat T50-P系統組成及特點, 并通過其在水下基坑中的具體實施及數據處理, 分析其精度及成果。
1 組成及特點
1.1 RESON Seabat T50-P系統組成
SeaBat T50-P是SeaBat T系列的新成員,是丹麥Reson公司研制的一種新型的高度集成化多頻率的水下三維成像聲納系統,由硬件和軟件部分組成。其中硬件部分主要包括: 聲速剖面儀、 表面聲速儀、DGPS、羅經、換能器及處理單元、一體化慣導(三維姿態儀)、主機配以網絡交換機、計算機組成;軟件部分主要是多波束數據采集及處理軟件,如圖1。
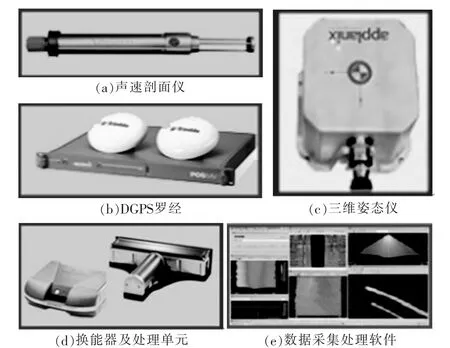
圖1 RESON Seabat T50-P系統組成
SeaBat T50-P多波束測深儀技術參數如表1。

表1 SeaBat T50-P多波束測深儀技術參數
1.2 RESON Seabat T50-P系統特點
(1)高度集成、安裝便捷,作業方便。 Teledyne Reson SeaBat T50-P多波束系統包含:便攜聲吶處理器(PSP)。PSP是一臺強大的聲吶處理器,簡化了線纜連接,便于設備快速安裝布置。 它可以用于聲吶、傳感器數據及準確時鐘同步的單點連接, 可以通過標準以太網連接到測繪使用的臺式機或筆記本電腦上。
(2)大掃寬角度,波束數量多。 等距模式下150°,等角模式下165°,且波束數量達到512條。
(3)工作頻率范圍大。 可以在19~420kHz之間自由調節,步長為10kHz。
(4)測深分辨率高。 測深分辨率達到6mm,可以有效分辨復雜的海底地形。
2 外業實施
本案例為上海某水域,臨近主航道,且來往船舶較多,為了解此區域的水下地形情況,對該區域進行多波束全覆蓋水深掃測,并對該區域地形做出分析。
2.1 設備安裝
主要對系統各部件包括換能器、GPS、羅經、三維姿態儀、顯示器等進行組裝并調試。
本次換能器安裝采用船舷方式安裝,如圖2。
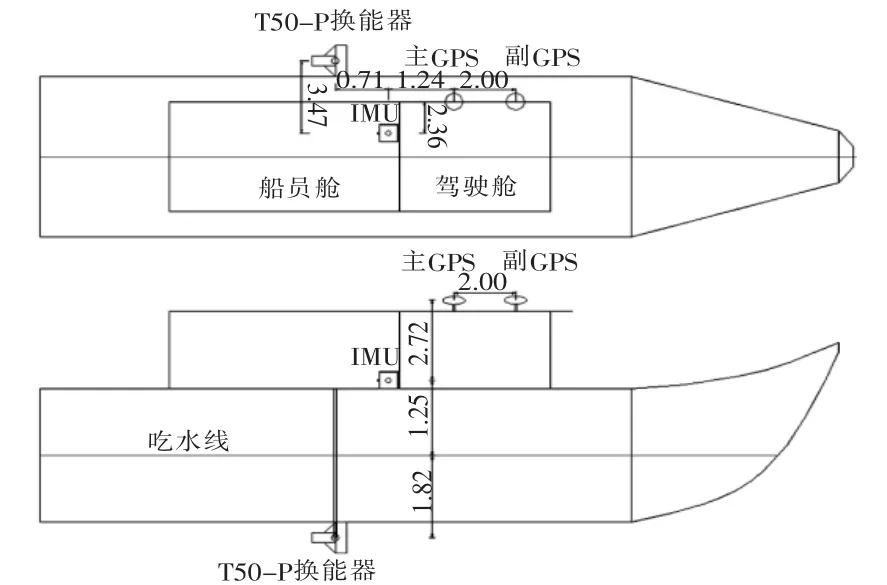
圖2 系統各設備安裝位置
2.2 安裝校準
多波束系統各設備安裝完畢,運行調試后,為了消除系統誤差,必須進行兩坐標系統之間的平移、旋轉校準, 將換能器基陣中心位置歸算到測量船重心位置處,以保證測量結果的客觀性[2]。 安裝校準在具有一定坡度和特征的區域進行。校準參數包括橫搖、縱搖、艏向。 GPS因采用PPS模式傳輸數據,故不需再進行時延校正。具體測試方法如下:橫搖-平坦區域、反向、同速、同一測線。 縱搖-斜坡區域、反向、同速、同一測線。 艏向-斜坡區域、同向、同速、不同測線。
經外業數據采集, 通過軟件校準計算求得各改正值,橫搖-0.63°,縱搖-2.95°,艏向-2.27°。
2.3 潮位觀測及聲速測量
潮位和聲速數據是多波束系統水深改正的重要部分,它直接影響最后的數據質量,因此潮位觀測及聲速測定必不可少。 本次潮位數據使用測區水文站觀測的潮位,時間間隔10min,以測前半小時及測后半小時為區間進行記錄。 聲速測量使用英產mini SVP聲速剖面儀,分別在測前、測中及測后對區域內聲速進行測定。
3 內業處理
本次多波束外業采集數據軟件使用PDS2000,內業處理軟件使用QINSY公司開發的QPS qimera軟件,qimera是一款易于使用且功能強大的聲納數據處理應用程序,兼容多種外業軟件數據采集格式,包括常用 的QINSY DB,Kongsberg ALL,RESON / Norbit S7K,Hypack HSX,GSF等。
Qimera包括的功能如下:
(1)支持多種原始數據格式及編輯后離散點數據導入。
(2)聲速改正、潮位編輯。
(3)安裝校準測試、擺動測試。
(4)多種濾波模式,如CUBE濾波、尖刺過濾等。
(5)強大的數據編輯模式,如swath編輯、三維編輯等。
(6)成果數據導出格式支持自定義編輯。
(7)引導性的工作流程,以最少的用戶輸入減少操作錯誤。
使用qimera進行多波束內業數據處理關鍵步驟包括:靜(動)吃水、潮位、聲速等改正值合并,建立動態曲面,尖刺濾波,CUBE濾波及三維編輯、swath編輯等。
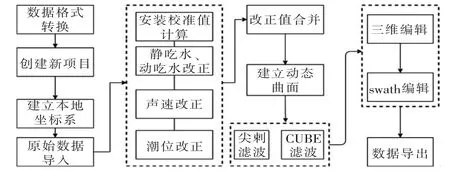
圖3 qimera多波束處理流程
4 成果分析
使用qimera軟件根據以上流程處理最后分別得到1m及5m格網建立的數字高程模型圖,如圖4,圖5。
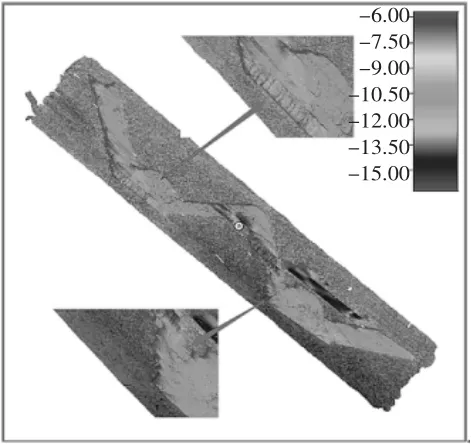
圖4 1m格網模型
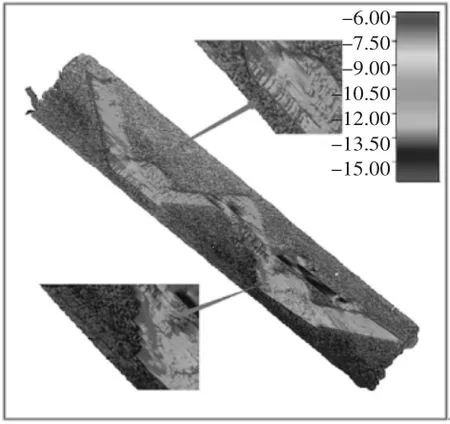
圖5 5m格網模型
根據數字高程模型顯示,該區域有兩處基坑,形態一大一小,大基坑形狀似“W”字母,總長度近5km,寬度約300m,最深處達13.5m,原泥面水深約8.5m,基坑與原泥面深度落差近5m, 基坑區域內地形表現平緩規整;小基坑長度約1km,最寬處約170m,水深可達15m,與原泥面落差近7m。 通過比對1m及5m格網模型, 可以看出1m格網模型呈現的地形細節精細程度明顯優于5m格網模型。
通過對大基坑特征位置附近地形進行剖面分析,如圖6,可以明確看到此區域的深度起伏變化,剖面地形呈梯次變化, 由8.5m水深在20m處陡深至10.5m附近,斜率約為1∶2,后至110m處出現急劇變深至13.5m附近,寬度達90m,斜率1∶4,深度剖面呈現“圓拱”形態,后梯次變淺至8m,寬度約40m。 結合模型圖可以看出此處地形在原有基坑基礎上再次加深。 該處基坑呈現8.5,10,13.5m三種水深梯次變化,在水深變化處斜率近似相等,水下基坑地形規整。
通過對小基坑特征位置附近地形進行剖面分析,如圖7,該剖面亦呈現梯次變化,由海底原泥面的8m,急劇變深至12.5m附近, 以緩坡地形式后逐漸變深至15m左右,寬度達160m,后急劇變淺至8m附近,斜率1∶2。

圖6 大基坑地形典型剖面圖
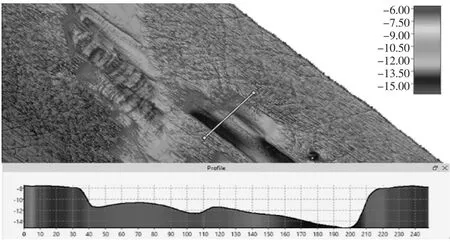
圖7 小基坑地形典型剖面圖
綜合大小基坑附近地形剖面及整個高程模型分析, 此區域內兩處基坑與周圍原泥面水深有明顯差異,基坑內水深變化平緩且地形規整,兩處基坑非自然形成,疑似采砂船在此采砂施工造成。
5 精度評定
多波束數據成果的精度包括內符合精度及外符合精度。 內符合精度可通過主測線和檢查線中央波束來計算,這樣可得到一個交叉點不符值的點數列[3]。外符合精度是以主測線或檢查線中央波束水深作為參考水深,與檢查線或主測線的扇面水深計算交叉點不符值[4]。
根據JTS 131—2012《水運工程測量規范》中深度比對互差要求: 水深H≤20m時, 深度比對互差≤0.4m,且超限點的比例≤20%[5],如表2,表3。 本次測量內、外符合精度均滿足規范要求,成果質量可靠。
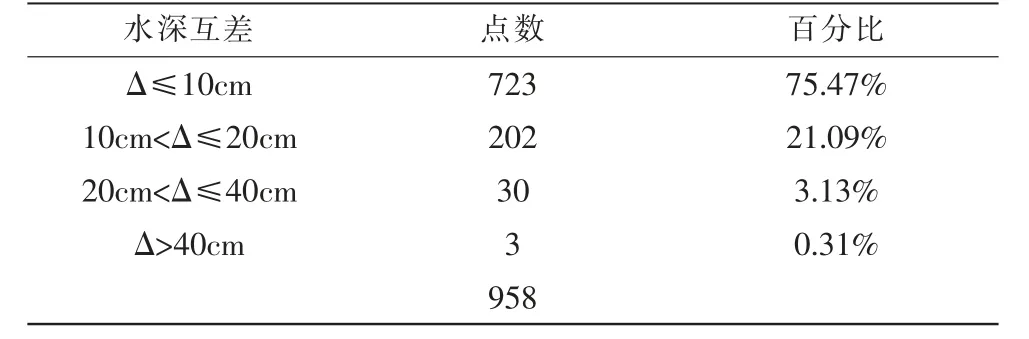
表2 內符合精度對比情況

表3 外符合精度對比情況
6 經驗總結
(1)多波束測深系統是多種精密設備集成后的產物, 每個設備都對最終的數據質量有著至關重要的作用,因此在測量實施前的準備環節,要對各設備的運行狀態須作重點關注, 正確量取各設備安裝時的相對位置,以及安裝校準值的計算。
(2)類似的海底基坑調查作業,要對調查區域有事前了解, 這樣可針對其區域特征選擇滿足調查需要的設備。 在外業施測時的規劃測線, 尤其在陡坡(水深急劇變化處)附近需適當加密,以保證多波束外業的全覆蓋掃測。
(3)建立的數字高程模型圖,格網越小,細節顯示越細致,但文件大小也成倍增長,因此最終的成果應根據實際需要選擇合適的格網大小。
7 結語
通過本次水下基坑掃測,RESON Seabat T50-P多波束測深系統在整個測量實施過程中, 系統各設備運行狀況穩定, 良好地完成了外業測量工作。 由qimera多波束處理軟件分析處理后建立的數字高程模型圖及剖面圖, 清楚呈現了水下基坑的具體形態(走向、長度、寬度、坡度等信息),直觀地表現了周圍地形的差異變化,且分辨率高,經分析軟件統計,外業采集數據精度高,質量可靠,對其他類似的水下地形調查項目,可以起到很好的借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44