基于越疆魔術師機械臂的流水線設計與應用
2020-08-11 09:19:46王瑞娟胡文杰
科學技術創新 2020年25期
李 超 陳 佳 王瑞娟 胡文杰*
(咸陽職業技術學院,陜西 咸陽712000)
在工業機器人的智能化程度越來越高的情況下,利用人工智能的方式來解決工業生產的效率,是全球都亟待解決的一個問題。隨著生產方式自動化的不斷提高,應用高智能的工業機器人來完成一些大型的,重復程度比較多的工業生產,應該是目前社會上的主流趨勢。
該機械臂是由越疆公司研發的多功能輕小型的智能機械臂,其最大的優點在于智能化程度比較高,可塑性較強而且精度比較高,能夠完成比較精密的工作,而且在完成大規模集成化的生產時有著獨特的優勢。該機械臂還可應用于家庭生活、學校實訓等多個方面。充分體現了該機械臂功能的強大和用途的廣泛。
就現狀來說,全球的人工智能市場還處于一個較大的發展時期,智能化的產品還沒有形成一定的市場影響力,在解決工業生產的高智能自動化問題方面還存在一定的瓶頸,該課題最終目的就是要解決這一問題,彌補這個市場缺口,解放勞動力,依托多機械臂和其它輔助配件的共同使用來改進目前工廠的流水線生產,提高工業生產的效率和利潤。
1 系統概況
流水線搬運機械臂是由編程腳本編程控制、位置檢測和氣動技術于一體的完整的綜合的控制系統。這套系統包括軟件部分、電氣部分和機械驅動部分。機械驅動部分采用機械臂臂身、滑桿、吸盤等;電氣部分包括步進電機、步進電機驅動器、直流電機、光電傳感器、顏色傳感器你、電磁閥等。
系統工作原理如下:按下啟動按鈕后,傳送帶運行,機械臂A 運行至工件堆放區,機械臂A 開始下降,夾取工件后門型運動至傳送帶上方,松開夾鉗放置工件,放置完畢0.5S 后機械臂A 開始上升歸位至初始設定位置待命。傳送帶運直到光電傳感器檢測到工件停止,同時機械臂B 開始下降。下降到位后機械鉗夾緊工件,0.5S 后開始上升,而機械夾鉗保持夾緊。門型運動至顏色傳感器上方,顏色傳感器打開識別顏色后關閉,機械臂門型運動至指定顏色分類區域進行放置歸類,放置完畢機械臂B 門型運動至初始位置進行待命,傳送帶開始繼續運行,如此循環。機械臂配合傳送帶完成一個周期的工作,完成工件采集、運送以及分類放置或者堆疊。
為了流水線搬運機械手臂動作的準確確定位置,系統采用二相八拍混合式步進電機。該電機具有較高的啟動頻率和運行頻率,而且體積小、耗能低。在該機械臂的機械手基座上還設置有一個旋轉編碼盤,該編碼盤的作用是:產生一個方波信號,設定每旋2°編碼盤發出一個脈沖信號,發送給DobotStudio 軟件平臺環境,用于定位控制,能夠達到精準的運行和操控。為了機械臂運行的安全性和準確性,機械臂安裝了下限和上限滾軸式行程開關,該開關的作用是:在基座上設有左轉和右轉電感式開關,由光電傳感器開關構成的工件檢測系統負責檢測傳送帶A 上的工件是否移動到指定位置,運動到指定位置后機械手開的始動作。此外,步進電機固有的特點使它運行在某個頻率上會產生共振,在編寫脈沖信號輸出時,設定的頻率值除細分數后避免在200-250 之間,至此完成一整套的機械臂搬運工作。該項目主要的模塊化技術流程圖如圖1 所示:
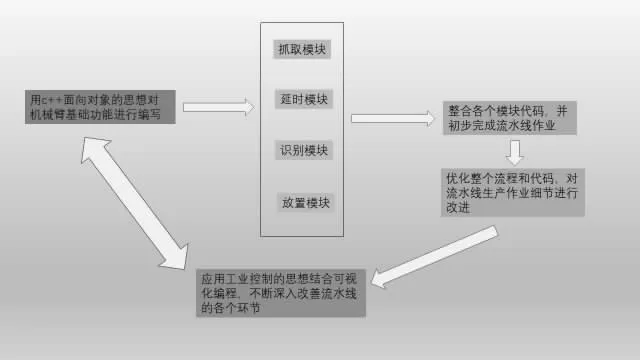
圖1 模塊化技術流程圖
2 系統硬件基礎
根據流水線搬運機械手的控制要求,考慮到I/O 點數通常留有10%-15%的裕量,我們采用越疆DobotStudio 軟件平臺環境。這個平臺可以完全滿足自動化控制需要,具有完善指令控制系統,功能齊全的控制方式、豐富的可擴展編程模塊等等。此外,性價比高也是此系統采用它的重要原因。該系統采用以c++為底層編程做為基礎,它可以直接通過python 指令化編程或模塊化編程的方式驅動步進電機實現不同的功能需求,以控制機械手的位移和運動速度,來控制機械臂完成不同的工作。
系統的輸入信號由兩部分組成,分別是可視化代碼和積木化編程和電感式接近開關、光電開關、和滾軸式行程開關等,這些傳感器信號和按鈕信號作為機械臂的輸入變量,經過機械臂的輸入接口端輸入到內部儲存數據的寄存器上暫存,然后在機械臂內部CPU 進行邏輯運算或者數據處理后,以輸出變量的形式送到輸出接口端,從而能夠驅動機械臂上的電機控制機械手的上下升降和左右旋轉等動作,讓機械臂能夠進行精準的門型運動。在現場工作期間,可通過計算機上的軟件對其動態控制,并可及時地根據具體環境的控制要求對其坐標和點位進行修改和調整。
在數控系統中要求點位要非常準確控制時,就要通常用步進電機作為驅動電機,因為該電機體積小,耗能低,而且準確性和可靠性高。步進電機驅動器的功能是把PLC 控制系統發出的電脈沖信號轉化為步進電機的角位移,從而對機械手進行預定的整個軌跡的控制。該系統驅動器信號端用的是12V 電壓供電,輸入端信號為低電平有效。下面是系統機械臂的I/o 分配表1:
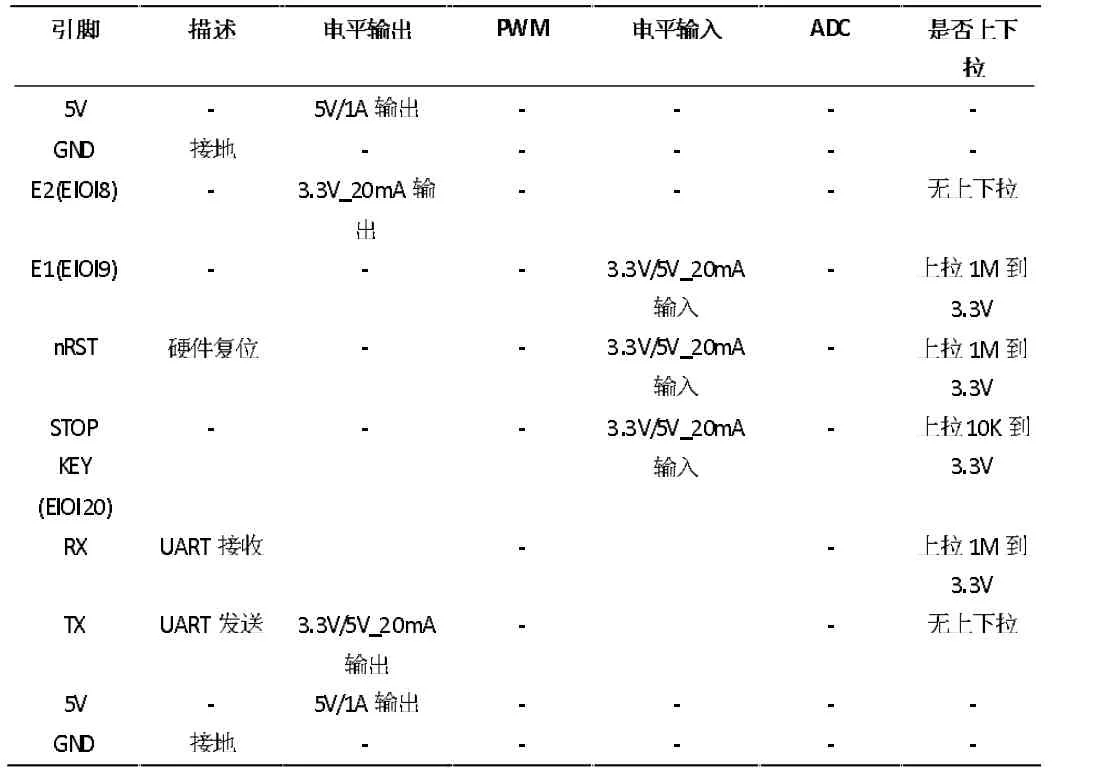
表1 系統機械臂的I/o 分配表
3 系統軟件基礎
流水線搬運機械臂的操作方式有兩種,分別是手動操作和自動操作。自動操作又分為步進操作方式、單周期操作方式和多周期操作方式。其中連續多周期操作方式為最常用的工作方式,采用以c++為底層的編程系統對機械臂進行精確的自動控制以完成預期的工作任務。這套編程系統采用可視化編程系統。可視化編程,就是可視化程序設計:也就是我們常說的所見即所得,這種編程方式,簡潔、高效。我們力圖實現編程工作的可視化的目的,就是隨時可以看到結果,程序和結果的調整同步,大大提高開發效率。可視化編程是與傳統的編程方式相比而言的,這里的“可視”,指的是無須編程,僅通過鼠標點擊,和類似搭積木的方式在可視化界面完成的設計工作,是目前最好的Windows 系統上的應用程序開發工具。
系統搬運模塊與傳送帶程序結構如圖2 所示。
系統識別識別模塊與放置模塊的程序結構圖如圖3 所示。
4 機械臂的實踐運用
越疆機械臂是一款多功能高精度輕量型智能實訓機械臂,是一站式STEAM 教育綜合平臺,具備3D 打印、激光雕刻、寫字畫畫等多種功能,預留13 個拓展接口支持二次開發,用戶可以通過軟件編程結合硬件拓展來開發更多的應用場景。
而我們所研究和運用的主要是應用在工廠流水線生產過程中,可替代人力做重復搬運的工作,類似于傳統流水線生產搬運,消耗人力,效率低下,對于一些重復程度較高的生產,使用機械臂流水線搬運,可大大提高工廠自動化水平,降低人力成本,可幫助工廠快速搭建起生產線,市場前景廣闊。
該機械臂在能夠完成流水線生產搬運的同時,結合其他輔助配件還可以完成3D 打印,定點抓取與放置,寫毛筆字等一些高精密性工作。而市場上對該機械臂的實踐和應用大多也集中在這一方面。例如:
a.2017 年1 月,越疆機械臂攜手阿里云ET 揮毫潑墨寫春聯,展示現代科技與傳統文化的融合。2017 年5 月,越疆機械臂作為唯一的中國科技產品亮相2017 年Google I/O 開發者大會。
b.還有在2017 年10 月,上海交通大學工程訓練中心電子電工實驗室采用越疆機械臂進行實踐教學,進行機械、自動化等相關課題研究。11 月,西安交通大學設計系學生用于實驗室課題研究-智能工廠,該課程設計的目的是為了實現工廠自動化、智能化的生產與管理。
c.2017 年12 月,悉尼科技大學工業機器人與基礎算法項目向學生展示了如何操控機械臂以及并了解機械臂可執行的操作任務。
而就工廠自動化生產這個方向來說,該機械臂有著絕對的優勢,我們曾經做過的一些小的實驗,利用機械臂的傳感器系統建立一個圖像坐標系與機器人坐標系,并對傳感器識別到的外界物體進行預處理,提取物體特征并匹配特征模板來進行識別、分類,最后發送指令對機器人動作進行控制。比如,物體的定點抓取,精準放置,和顏色識別等。都是通過機械臂的改系統進行完成的。也主要應用到了可視化編程技術。通過考察工廠流水線的具體運作流程,對機械臂各個功能模塊進行精確定位,最后完成智能化,自動化的工程流水線生產作業。該機械臂的3D 打印模塊,通過配合3D 打印組件的使用,也可為工廠產品的制作提供有力的保障,配合流水線生產作業,完成工廠從生產到搬運再到分揀的工作,解決工程自動化程度的提升。解決目前市場上,傳統流水線作業生產效率低下等問題。
通過以上該機械臂在人工智能領域的多方向應用和實踐,不難看出,我們機械臂流水線自動化生產課題市場前景廣闊,結合該機械臂的多種接口和多種配件組合使用,一定可以在市場上開創出屬于智能化機械臂的新時代。

圖2 系統搬運魔塊與傳送帶的程序結構圖
圖3 系統識別模塊與放置模塊程序結構圖
5 結論
流水線搬運機械臂具有高效的工作效率、準確的定位精度、超強的適應能力,實現了機械化和自動化的有效結合。該系統使生產效率提高了35%,運行穩定,可靠性高,維修方便,具有廣泛的應用前景。當前,在解決工業生產的高智能自動化問題方面還存在一定的瓶頸,該課題最終目的就是要解決這一問題,彌補這個市場缺口,解放勞動力,依托機械臂好和其它輔助配件的共同使用來改進目前工廠的流水線生產,提高工業生產的利潤和價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
當代工人(2020年8期)2020-05-25 09:07:38
傳媒評論(2019年4期)2019-07-13 05:49:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
