基于自適應模糊遞歸控制的機器手臂位置跟蹤研究
2020-08-13 05:44:00賀乃寶趙俊杰
制造業自動化 2020年8期
王 剛,賀乃寶,高 倩,趙俊杰
(江蘇理工學院,常州 213000)
0 引言
傳統的伺服電機被廣泛運用于各種控制系統中,但由于我國機器人現階段狀況以及直驅力矩電機表現出的優勢,用直驅代替傳統的驅動方式被很多人運用,但這種方式對控制算法要求很高。早前有人為了解決機器人運動學方面的問題,運用神經網絡來設計控制器[1,2],但其自身存在的缺點通常需要跟其他控制算法相結合。文[3]中是研究將神經網絡算法加入機器人控制器的設計中,仿真結果驗證了在具體機器人的控制中此方法是可行的。在文[4~8]中分別研究了不同的自適應模糊算法,結果表明對控制對象都有較好的跟蹤控制效果。現階段,模糊控制對于復雜的非線性控制系統還是有很好的控制效果,所以,本文基于自適應模糊遞歸控制來設計控制器,對直驅電機雙關節機械臂的位置進行跟蹤控制。
1 系統描述

圖1 機械臂示意圖
雙關節機械手臂結構模型如圖1所示,動力學方程:

2 Backstepping控制器設計及穩定性分析
2.1 Backstepping控制器設計
在進行控制器設計之前我們先進行變量公式的定義,假設yd為具有二階導數的期望角度,y跟蹤軌跡yd為控制目標,定義誤差表示為:

x2為α1的估計值,其誤差定義為:

通過選取α1,使得z2趨近于0.由式(4)和式(5)可以整合得到:
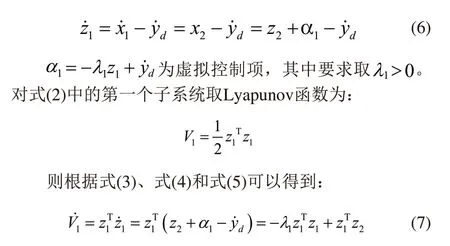
z2=0則可判定該系統第一個子系統穩定。
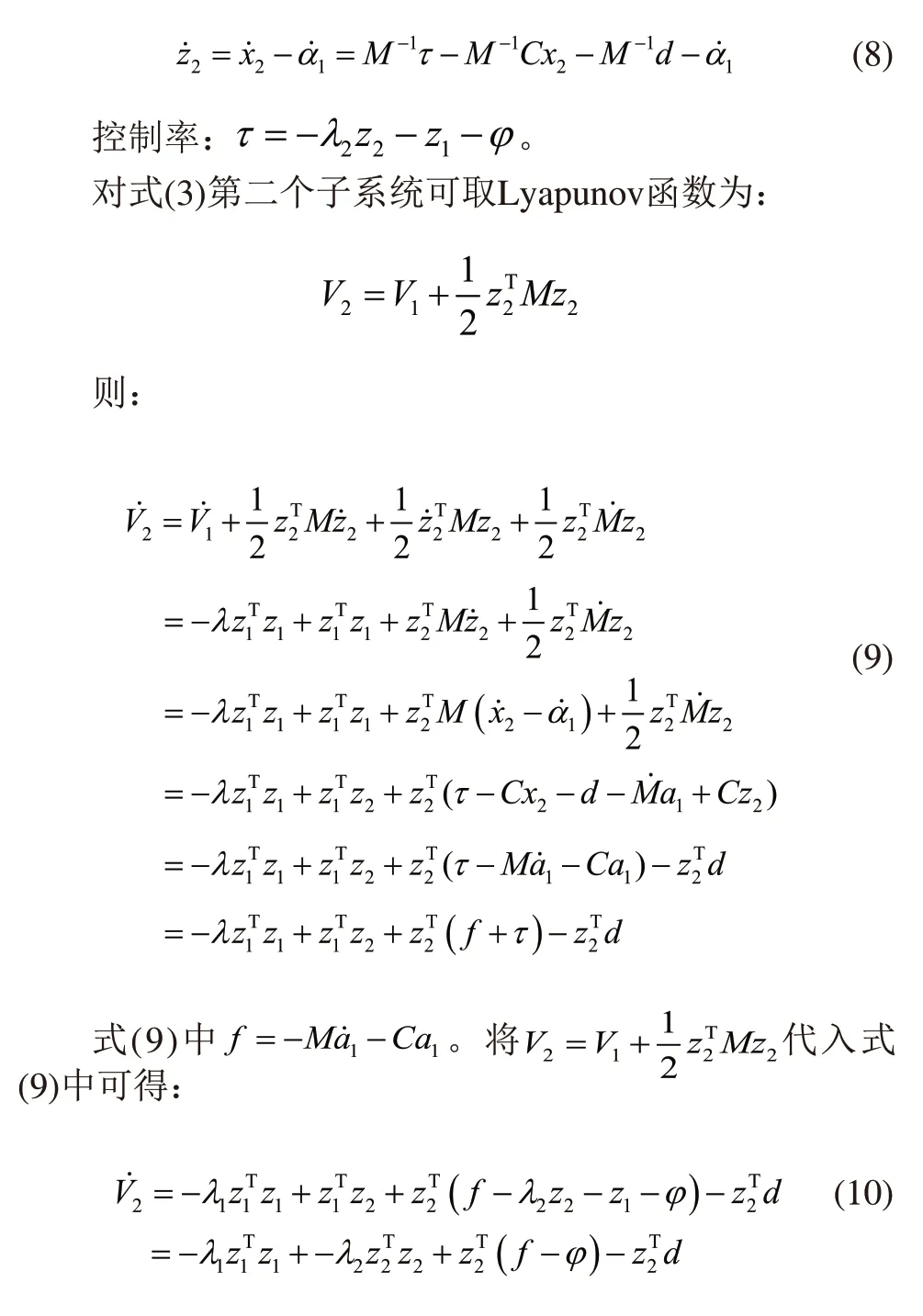
接下來進行控制率的設計,由式(3)和式(5)可得:
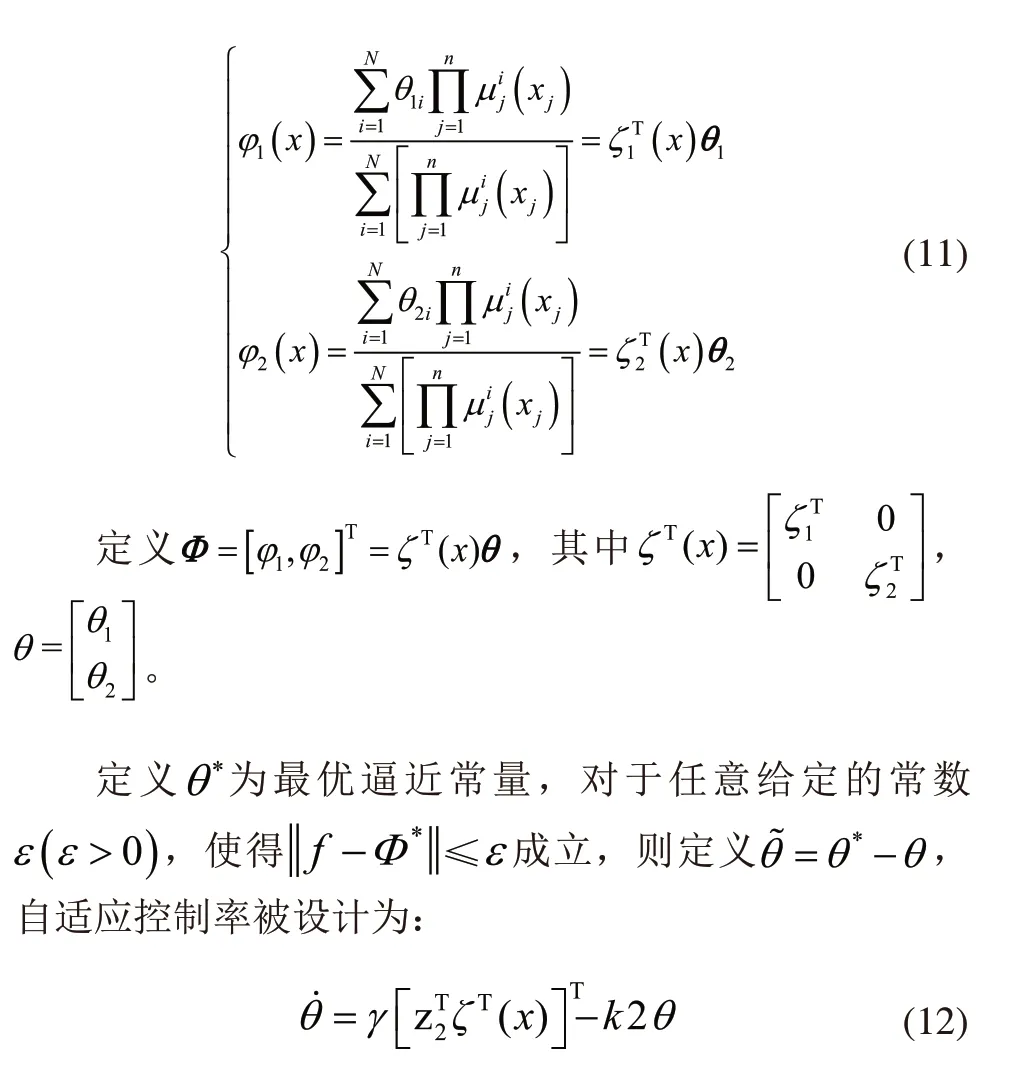
通過對f表達式的分析,可知其中包含了機械臂的相關建模信息,這里采用模糊系統逼近f來實現無需模型信息的控制,在逼近非線性函數f的系統中引入φ。根據IF-THEN控制規則,采用乘積推理機、單值模糊化和重心平均反模糊化的方法來構造模糊系統[9~11]。
對f(1)和f(2)分別采用模糊逼近,設計出該模糊系統如式(11)所示。
2.2 系統穩定性分析
整個系統的Lyapunov函數取為:

將式(12)代入式(15)中:

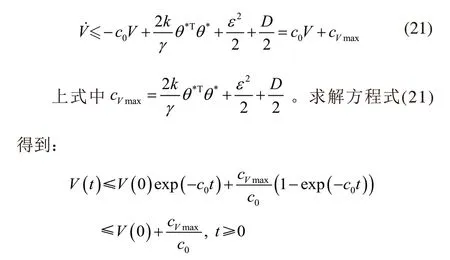
其中V的初始值為V(0)。
3 系統整體仿真試驗
本仿真實驗以機械臂為被控對象,通過實驗驗證控制算法的精確性和先進性,由此可知該系統是穩定的,將最終試驗結果和直接自適應模糊控制算法進行比較,得出此次設計的算法優越性明顯且穩定控制效果明顯[12]。
系統的參數取值如下所示:
1)連桿質量m1=0.765,m2=0.765;
2)連桿長度l1=0.25,l2=0.25;
3)關節到連桿重心距離r1=0.15,r2=0.15;
4)系統的初始狀態x(0)=[1,1,0,0]T;
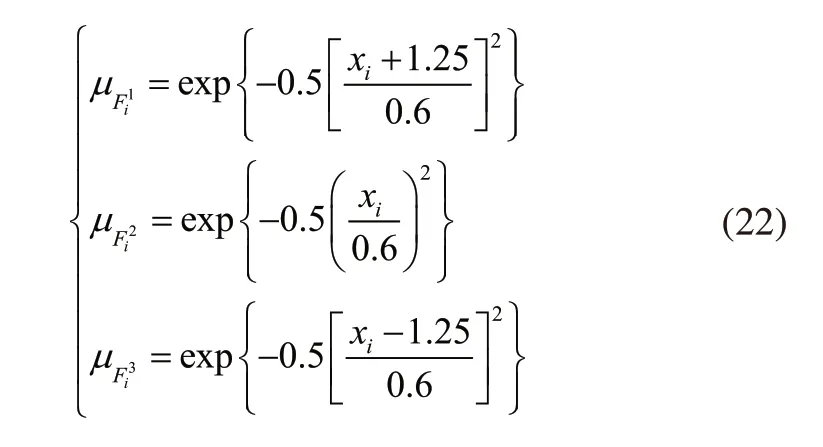
取模糊系統的隸屬函數為:
令控制律和自適應律式中λ1=30,λ2=50,k=1.5,γ=2,其仿真程序如圖2所示,關節的期望軌跡都是yd=sin(2πt)。位置跟蹤仿真結果如圖3所示。

圖2 模糊隸屬函數的設計
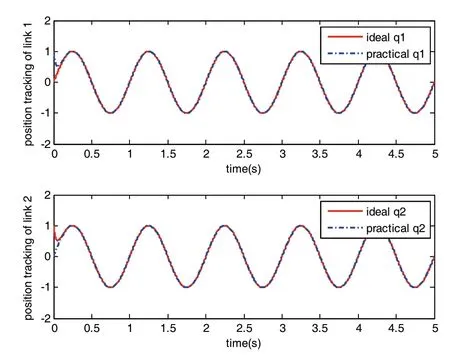
圖3 雙力臂位置跟蹤軌跡
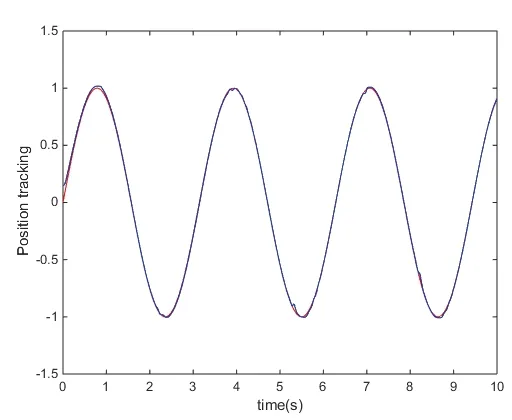
圖4 直接自適應模糊控制的位置跟蹤軌跡
將本次仿真實驗圖跟直接自適應模糊控制的位置跟蹤軌跡圖相比較,如圖3和圖4所示,可以很明顯的看出Backstepping模糊自適應控制實現了對控制對象的更好的穩定跟蹤控制,圖3中可以看出控制響應非常迅速,在對關節1進行位置跟蹤時響應時間大約需要0.11s,關節2僅大約需要0.09秒,而且,軌跡曲線穩定且準確,圖4中直接自適應模糊控制下的關節響應時間慢,并且控制效果不是很好,而本次測試響應更加快速,控制效果精度高,實現了預期的效果。
4 結語
本次研究對直驅雙關節機械手臂完成了基于自適應模糊遞歸控制算法的研究設計,并達到預期效果,主要研究結論如下:
1)通過對當前控制電機的研究,了解了直驅力矩電機的機理以及相比于減速器的優勢,在今后的機器人控制技術發展方面會有很好的應用研究前景。
2)對Backstepping模糊自適應控制器進行穩定性分析,結果顯示本次設計的算法穩定且合理,可以對此類機器人進行位置跟蹤控制。
3)將本次仿真得到的實驗結果與直接自適應模糊控制進行比較,得出本次實驗設計的控制算法擁有更快的響應時間,位置跟蹤控制更加穩定精確。
4)雖然本次設計的控制算法具有良好的控制效果,但是還有些問題需要改進的,下一步要做的就是如何優化模糊規則。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
