TBM配套智能噴漿機械手研究初探
2020-08-15 06:41:28王振飛徐鵬祖
建筑機械化 2020年7期
王振飛,徐鵬祖,黃 力,牛 歡,李 強
(中國中鐵隧道股份有限公司,河南 鄭州 450001)
TBM 掘進機已廣泛應用于我國山嶺隧道和硬巖地層中的開挖與支護施工[1~2],與其配套的噴漿系統經過多年的開發研究與改造,已形成一套較為完善的機械化配套施工設備[3~5],但在實際施工中噴漿系統也暴露出許多缺點和問題,比如人工噴射混凝土質量易受工人技能水平影響、操作手柄易損壞、操作人員易受傷、施工工效不高以及慣性堵管等問題[6~8]。隨著現代科學技術的發展以及施工機械化和智能化的趨勢,對噴漿系統的升級改造和智能化的研發已迫在眉睫[9~12]。本文通過對噴護系統的設備構造與控制設計研究,基于PLC 智能控制器的可編程化與智能化,提出了對噴漿工序智能化控制的概念,研發了堵管智能報警系統,設計出概念化的智能控制界面,以便操作、完成施工作業;最后通過經濟性分析,得出智能化噴護系統不僅可以提升現場施工質量、解放勞動力,而且還可以降本增效,效益可觀;同時該研究為下一步實現其他施工工序的智能化控制進行了探索。
1 TBM機械噴漿系統構造與控制設計
1.1 設備構造
TBM 機械噴漿系統總體由罐車、輸送泵、輸送管、噴漿橋、噴漿手和遙控手柄(控制器)等組成,核心結構為噴漿橋和遙控手柄(控制器),遙控手柄控制噴漿手在噴漿橋上完成行走、擺動、旋轉、噴射等一系列動作[13~15]。TBM 噴漿機械手有3 個自由度,即:環向行走、徑向行走和噴漿旋轉。依靠這3 個自由度,噴槍可以運動到工作空間的特定范圍位置按照噴漿工藝要求完成噴漿作業,如圖1 所示。
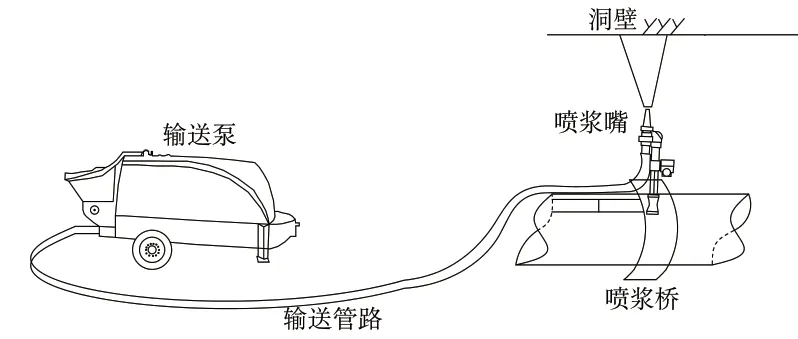
圖1 TBM機械噴漿系統設備構造示意圖
1.2 控制設計
噴漿機械手的控制原理是通過發射機(遙控器)發射信號,接收機接收信號完成遙控。遙控器把編碼器的指令信號加載到射頻信號上,向空中輻射;接收機接受含有指令信號的載頻信號,把指令信號從高頻信號中分離并還原為指令信號,送到解碼器中,解碼器輸出控制執行單元。
控制系統的設計主要包括計算機系統、遙控器、電源、電控系統抗惡劣環境等方面,其中最為關鍵的是計算機系統設計和抗惡劣環境設計。控制系統采用兩級分布式計算機控制系統結構,即規劃級和控制級。
1)規劃級 規劃級是噴漿手控制的決策者,它由計算機系統、操作器、行走傳感器組成。其任務是:接收來自操作器的示教數據和控制命令,接收來自行走傳感器和控制級的各種信息,進行工作環境識別,從而完成運動軌跡的規劃、生成運動軌跡控制指令,通過I/O 接口,指示控制級完成具體的運動控制。
2)控制級 控制級是噴漿手控制系統的執行者,是直接面向控制對象的,它由計算機系統、功率放大器、I/O 驅動電路組成。它的任務是:①接收規劃級發來的指令,完成規劃路徑的運動控制;②收集來自各關節位置傳感器的信息并進行預處理,再傳送給規劃級,以便規劃級進行下一輪的運動軌跡規劃;③完成對控制器、功率放大器及自身的故障診斷,并把診斷結果送給規劃級,以便顯示。
2 智能化噴漿機械手的研究與實施
2.1 智能化噴漿機械手的研究
由設備的控制原理和設計可以看出,噴漿機械手的控制主體是人,人工噴射混凝土凹凸不平、厚薄不一是質量通病,噴漿過程中易出現人員受傷問題。所以,筆者通過對設備構造和控制設計的研究,結合PLC 智能控制技術,提出了智能化噴漿機械手的研究設想,即:人在主機室可遠程遙控完成噴射混凝土工序,而且施工質量能夠保證;另考慮特殊地質(不良地質段、塌方、溶洞等),進行人性化設計,兩種噴護動作供選擇——自動和手動。具體設想內容如下。
1)軟件保證 PLC 可編輯控制器代替原來的控制系統中的芯片控制,并將控制邏輯編寫入PLC 控制器內。
2)硬件保證 對原設備進行設計改造,裝備超聲波測量裝置、混凝土量預警裝置和堵管警報裝置以及完成設備所有動作所需的光纖、電纜和響應裝置。
3)動作完成過程 旋轉啟閉開關至啟動(ON)→旋轉圍巖類別選擇開關至任意類別(II、III、IV、V)→噴漿手自動噴至設計要求厚度。不良地質段必須人工噴護,選擇手動開關,人工進行噴射混凝土。
2.2 智能化噴漿機械手的研究實施
1)程序邏輯關系模塊 根據輸送泵泵送能力,計算出每秒噴射方量;根據噴漿手噴嘴偏轉角度,計算出噴嘴在一個斷面掃射的面積范圍(圖2),再通過超聲波測量裝置測出其噴射厚度,達到設計值時發出信號,控制噴漿手運動軌跡;考慮噴漿料的回彈(按10%算),得出每秒的有效噴射混凝土量,根據噴嘴掃射面積,得出每秒實際噴護厚度,進而求得達到設計厚度所需的噴護時間,根據該時間調整噴嘴旋轉轉速,從而達到噴層厚度均勻整齊。具體邏輯關系見下圖3。
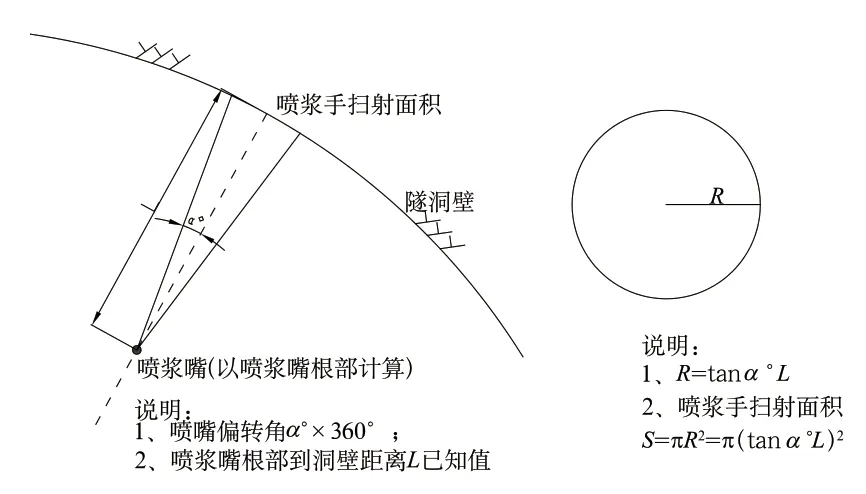
圖2 某一斷面掃射面積關系圖和計算公式
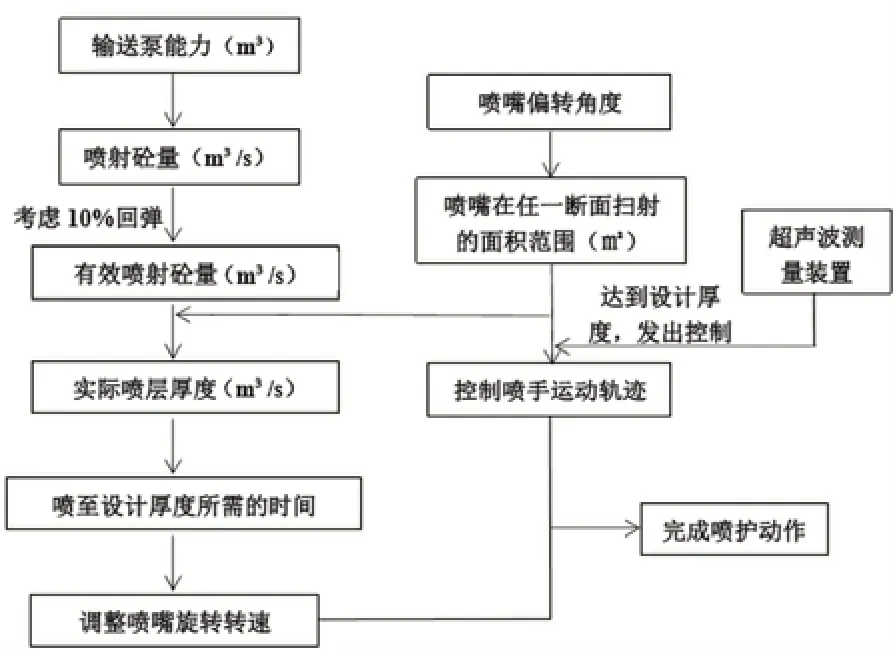
圖3 程序邏輯關系圖
2)視頻監控系統 在TBM 噴漿橋的適當位置安裝攝像頭,并將監控系統與控制系統數據整合在同一界面顯示。監控系統的作用有以下兩點:①監控噴護質量;②由監控資料確定圍巖類別,以此來選擇圍巖類別選擇開關的位置。
3)堵管智能報警模塊 輸送管壁內安裝測壓芯片,當發生堵管時,堵管位置及靠近輸送泵一側管壁壓力會急劇增大并持續若干時長,測壓芯片將會把數據反映至主機顯示器同時發出報警指令,命令輸送泵開關跳閘,停止泵送工作;然后根據顯示器顯示故障位置進行管道的疏通,疏通好之后點擊復位,再進行正常噴護。其中警報值的確定,以多次堵管試驗數據的平均值為依據,即發生堵管且壓力值達到設定的平均值時,警報報警。圖4 為智能噴漿手控制界面的概念圖。
3 設想研究的經濟性分析
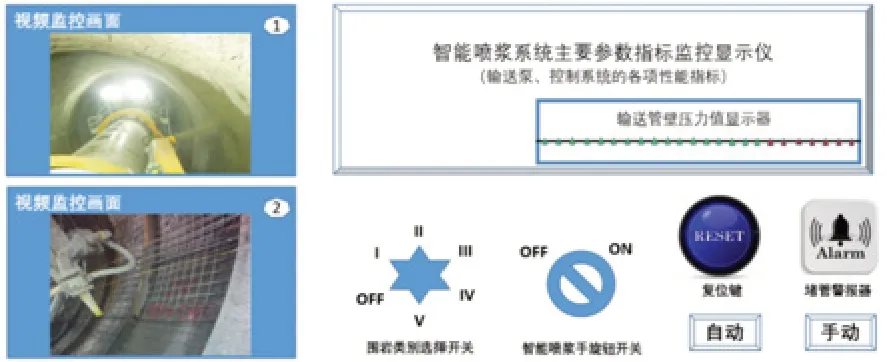
圖4 智能噴漿手控制界面的概念圖
正常情況下,掘進班組采用“三班倒”工作制,其中每班組計劃2 名噴漿人員。若采用智能噴漿設備,則每班組可節約2 名勞動力,再考慮人員受傷的情況,假設每人每年1 次;勞動力和免傷均可為項目節約成本;另外,堵管快速反應且能夠找到堵管位置進行疏通所節約的時間,亦可換算成產值(未計后期縮短工期和釋放勞動力所節約的成本)。具體經濟性分析數據如表1所示。
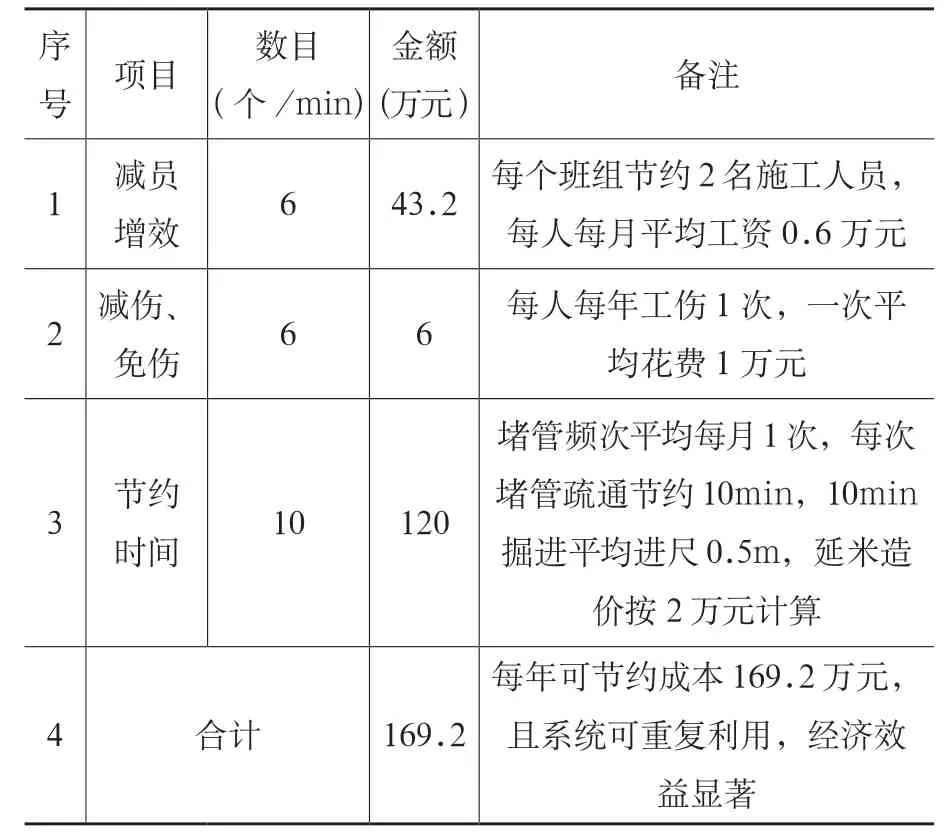
表1 智能噴漿手經濟性分析表
綜上,裝配智能噴漿手的TBM,不僅節約勞動力,達到減傷、免傷的效果,而且還可以借助堵管智能報警系統,節約疏通管路的時間,增加掘進時間,創造多余產值。由表1 數據可知,平均每年可節約成本、創造產值共計169.2 萬元,對于中長距離隧洞,裝配其效果更佳;考慮到設備能夠重復利用,其經濟效益更加顯著。
4 結論與建議
1)該研究通過對智能控制軟件和機械設備硬件的耦合創新,提出了智能噴漿手的設想,并對其理論設計進行了初步研究,最后對研究成果的經濟性進行了定性定量的分析,效益頗為顯著;從實用性、安全性和經濟性的角度,均可深層次的開發研究。
2)對噴漿系統的智能化研究與開發,可為下一步實現其他施工工序(錨桿安裝等)的智能化控制進行鋪墊。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(2020年4期)2020-10-27 02:45:52
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國衛生(2016年2期)2016-11-12 13:22:16
