某飛機光電瞄準吊艙校靶分析
2020-08-17 10:47:22張明明王敏夏正娜李曉樂
教練機 2020年2期
張明明,王敏,夏正娜,李曉樂
(航空工業洪都,江西 南昌,330024)
0 引言
某飛機的吊艙通過機身懸掛裝置懸掛于飛機的機腹下,由于制造和安裝誤差,武器和瞄準裝置相對飛機軸線的位置,在安裝初始狀態下一般不能滿足設計要求,因此必須校靶,使其安裝位置達到設計要求。通過校靶建立飛機軸線和火控系統各瞄準裝置瞄準線之間符合設計要求的正確的相對位置[1]。
吊艙是集紅外、電視、激光等多傳感器于一體的機載光電探測與瞄準系統,能夠在晝夜全天候條件下對海、地目標進行快速搜索、識別、跟蹤、定位、照射,引導制導武器對目標進行精確打擊及轟炸。吊艙上報瞄準線角度供機載火控系統解算,故需校準吊艙坐標系與機體坐標系之間的角偏差,以保證瞄準線角度的精度。
1 校靶方式
吊艙的校靶方式主要有地面人工校靶和動態校靶兩種方式,地面人工校靶是一種傳統的校靶方式,校靶方法比較成熟、可行,已得到廣泛應用。但這種校靶方式精度低且操作繁瑣。動態校靶是吊艙加裝慣性測量單元,通過濾波算法解算出吊艙坐標系與機體系之間的偏差,自動完成校靶。動態校靶不需要附加設施,操作簡單、快捷。因此,動態校靶是機載吊艙校靶的發展方向。
2 地面人工校靶
2.1 校靶時機
吊艙在初次掛裝時必須進行校靶,校靶工作在地面進行,同時要求瞄準吊艙工作在維護工作模式下。吊艙重復掛裝同一飛機的同一機身懸掛裝置時可依據外校基準掛裝,無需重復校靶。
2.2 校靶準備
在飛機前方一定距離處架設靶板,并在飛機左右各一定距離處設置標志桿,將飛機調水平,由地勤人員操縱吊艙校準吊艙與平顯的視軸對準。
2.3 校靶流程
1)控制吊艙進行方位俯仰方向上調校,直至瞄準吊艙視軸十字中心點與校準靶板上的瞄準吊艙校準十字中心點重合;
2)控制吊艙進行方位俯仰調校記憶;
3)控制吊艙先右滾90 度再左滾90 度,根據吊艙視軸十字線在標桿上的位置解算出橫滾掛裝角;
4)控制吊艙先右滾90 度再左滾90 度,檢驗橫滾校靶角度是否正確;
5)控制吊艙進行橫滾調校記憶。
由于某飛機吊艙懸掛于機腹懸掛裝置下,地面人工校靶時,靶板圖像受前起落架遮擋,本方案采用左右偏移校靶點的方法進行校靶。
在靶板水平方向上選取左右對稱的兩個校靶點,保證校靶點完整的出現在吊艙的視場中。操作人員控制操縱游標,分別使吊艙圖像中的十字線與偏移后的靶點十字軸完全重合,記錄吊艙偏轉的方位角和俯仰角,取兩組數據的平均值,并做好記錄。控制吊艙回到初始位置,在方位和俯仰方向上轉動上述記錄的角度值,按壓 “校靶” 按鈕,完成校靶。
地面人工校靶是一種比較成熟、可行的方法,但存在需要將飛機頂水平、遠距離設立靶板、場地要求較高、校靶時間長等局限性。此外,吊艙掛裝其他飛機或不同的掛梁時,需重新校靶,嚴重影響了飛機的出動準備時間。
3 動態校靶
動態校靶不需要單獨架設靶板、人工操作校靶,而是通過在吊艙加裝子慣導系統(慣性測量單元),通過濾波算法解算出吊艙坐標系與機體系之間的偏差,自動完成校靶。動態校靶的方式不需要附加設施,操作簡單、快捷,簡化了校靶的操作流程,可大大縮短吊艙校靶時間,提高吊艙的可操作性和維護性。
3.1 吊艙傳遞對準原理
吊艙的子慣導系統精度較低,誤差隨時間積累,不能滿足飛機長時間執行任務的要求,需利用飛機的主慣導系統對其進行動基座傳遞對準。
目前對于傳遞對準技術方面的研究很多,方法主要可分為測量參數匹配法和計算參數匹配法兩大類。測量參數匹配法有加速度匹配和角速度匹配等,計算參數匹配法典型的有速度匹配、位置匹配、姿態角匹配等[2,3]。這些方法可以單獨使用,也可以相互配合使用,本文采用 “姿態+速度” 匹配的傳遞對準方法[4],將主、子慣導系統輸出的姿態和速度匹配量做求差運算,作為卡爾曼濾波器輸入,通過卡爾曼濾波器實時估計出子慣導系統的失準角、速度誤差、陀螺漂移等誤差狀態量,并對子慣導系統進行反饋校正。子慣導系統的對準過程分為三個子過程:1)慣導解算:根據主慣導系統提供的初始導航信息,計算出導航方程的解;2)對準濾波算法:基于速度和姿態觀測量,通過卡爾曼濾波器,實時估計出各誤差量;3)修正指令生成:將誤差估計反饋為導航方程的修正量。
3.2 濾波算法
卡爾曼濾波是一種遞推線性最小的方差估計方法,故傳遞對準濾波算法均采用卡爾曼濾波技術,傳遞對準系統離散化后模型簡記為:

式中:Xk為系統狀態向量;Zk為量測向量;Φk,k-1為k-1 到k 時刻的轉移矩陣;Γk-1為系統噪聲矩陣;Hk為量測矩陣;Wk-1為離散型系統零均值白噪聲;Vk為離散型零均值量測白噪聲向量。
經卡爾曼濾波離散化后的方程如下:

3.3 桿臂補償
在進行傳遞對準過程中,當載機相對慣性空間產生角運動時,由于慣性導航部件(前機身設備艙)與吊艙的慣性測量單元(機腹段)安裝于載機的不同位置,主慣導系統與子慣導系統之間會產生桿臂效應。因此對于桿臂的位置和速度可采用如下補償算法:
3.4 時間同步
載機主慣導系統的導航數據通過航電總線發送至武器外掛管理計算機,武器外掛管理計算機處理后通過武器總線再傳遞給吊艙的子慣導系統(見圖1)。故子慣導接收到的主慣導信息具有較大的延時,根據系統設計,主慣導系統發送給武器外掛管理計算機數據周期為50ms,武器外掛管理計算機傳遞給吊艙數據的周期為50ms。時間延時在傳遞對準過程中勢必會造成較大的誤差。子慣導收到主慣導信息后,需要進行主、子慣導時間同步的處理。
某飛機采用內插的方法完成時間同步,主慣導系統與子慣導系統數據采用統一的GPS 時間,將衛星天線通過功分器一分為二,一路接至主慣導系統,一路接至子慣導系統,主慣導系統每個周期發出的數據打時標信息T0,子慣導系統接收到數據,時間為T1,t=T1-T0,t 為主慣導系統數據傳輸的總延時時間。從濾波時刻nT 開始,先保存子慣導系統的導航數據,接收慣性測量單元數據,進行解算,并保存數據,接收主慣導系統數據,提取時標,找到nT 時刻前后兩個時刻的主慣導數據,使用一階線內插公式計算出nT 時刻的主慣導數據,完成nT 時刻的濾波運算,修正子慣導系統誤差,最后把保存的數據逐次進行導航解算,得到吊艙所需的實時姿態信息[4]。
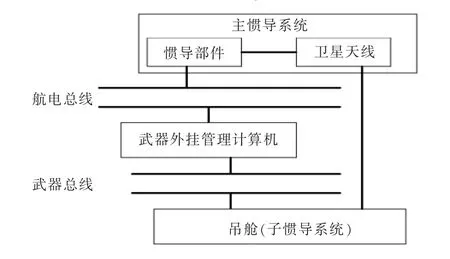
圖1 主慣導系統與子慣導系統交聯關系圖
3.5 校靶流程
在機上主慣導系統(慣性導航部件+衛星天線)完成初始對準,進入導航模式后,吊艙開始進行動態校靶工作。子慣導在整個工作過程中,根據指定頻率接收主慣導傳輸的導航數據,并根據子慣導系統內部的濾波器,完成初始對準和導航解算任務的同時,實時解算主慣導與子慣導之間的姿態偏差角,并將姿態偏差角輸出給吊艙的控制計算機進行校靶矩陣運算,完成動態校靶(如圖2 所示)。
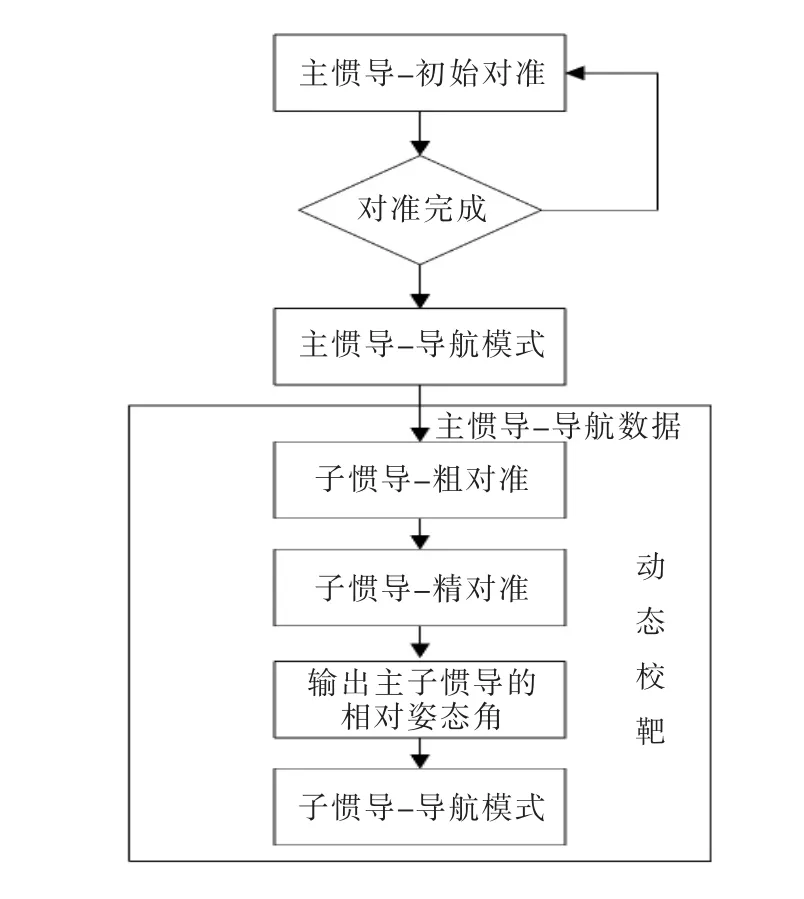
圖2 動態校靶流程圖
4 結語
本文主要介紹了某型飛機吊艙的兩種校靶方式,并對每種校靶方式的原理及流程進行分析,總結了校靶的優缺點,為某型飛機的吊艙校靶提供了參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
電源技術(2016年9期)2016-02-27 09:05:39
