水下便攜式可應答同步編碼聲源系統研究
2020-08-19 00:38:58張慶國李興武
海洋技術學報 2020年3期
張慶國,李興武,沈 雁,連 莉
(昆明船舶設備研究試驗中心,云南 昆明 650051)
隨著世界各國對海洋資源的大力開發[1-2],以及海防軍事需求的不斷提升[3],直接推動了多種不同用途水下航行體或水下設備的研制,從而加快了水下航行體相關技術的快速發展。如傳統的UUV(Unmanned Underwater Vehicle)、AUV(Autonomous Underwater Vehicle)、ROV(Remote Operated Vehicle),以及不斷擴展的水下無人系統、水下滑翔機等,甚至可利用上述各種水下設備組建更高復雜度的水下無人作戰體系[4]。
無論是在水下航行體(或稱“水下平臺”)的研制過程中,還是實際水下作業時,均需對平臺的當前位置信息、航行狀態等參數進行實時監測,同時亦需具備一定的遠程應急遙控手段,為水下平臺的試驗測試、實航作業等提供相應的測量與控制手段,確保其試驗有效性和作業安全性。在工程上,通常采用適裝聲源的方式配合水聲定位系統完成水下平臺的實時定位跟蹤,利用應答器等專用設備安裝在水下平臺上實現水聲遙測與遙控等功能。但上述常規聲源或應答器雖能滿足水下平臺的基本測控需求,但也存在功能單一、適裝性差,以及重量重、尺寸大等不足,甚至無法在具備低功耗、小尺寸等特點的小型水下平臺上安裝。由此可見,常規聲源和應答器占用了水下平臺上極為寶貴的空間和動力,與其綜合測控需求矛盾逐漸突出,甚至在一定程度上成為了制約其發展的瓶頸因素之一。
高精度水聲定位跟蹤多采用水下合作目標定位跟蹤系統,配合聲源(含信標)實現水下目標位置信息的實時測量[5]。按照工作方式主要分為兩種:同步式和應答式。同步式需要在工作前與接收端進行時標同步,具有測量精度高、數據更新率快、結構簡單等優點,但因為需要同步操作和長時保持,使用操作略為復雜,且成本較高;應答式無需同步操作,利用查詢與應答往返的聲信號進行定位跟蹤,具有使用便捷、靈活性高等優點,但存在數據更新速率慢,軟硬件結構相對復雜等不足。由于同步式水聲定位系統具有更高的跟蹤精度,實際工程應用中多采用同步跟蹤方案[6]。水聲遙測遙控主要利用多種編碼方式構建水聲通信鏈路,從而實現一定距離內的有效信息傳輸。如水聲通信上常用的水聲通信機、水聲應答器等,多采用類似水聲定位跟蹤技術中的應答方式。
國外水聲工程技術起步較早,推出一系列商用乃至軍用水聲定位及通信系列產品。如美國的雷神公司(Raytheon Company)、挪威的康斯伯格海事公司(Kongsberg Maritime)、英國的 Sonardyne、CTG 公司(Chelsea Technologies Group)等[7]。以英國 Sonardyne公司UM-8370 型產品為例,工作頻率為18~36 kHz,具備水聲定位及應答通訊功能,尺寸是直徑為76 mm,長度為436 mm。相較國外來看,我國相關研究起步較晚,國內民用市場幾乎被國外產品壟斷[8]。但近年來,隨著軍事及民用海洋工程技術的不斷擴展,國內水聲工程相關設計和技術研究發展迅猛。中國船舶重工集團公司715 所的聲學釋放器為國內首型,工作水深可達1 000 m;哈爾濱工程大學的深海高精度超短基線定位系統,為我國“蛟龍”號、“發現”號和深海水下聲學拖體等多種水下潛器提供了水下精確定位服務[9]。國內水聲定位跟蹤技術研究能為國防及民事應用提供技術保障,但在小型化水下航行體應用中較為薄弱,尚未出現同時具備同步聲源和雙工水聲遙測遙控功能的聲源系統工程應用。
本文針對小型滑翔機和便攜式ROV 等小型水下航行體的水下試驗測試,水下作業中的高精度實時定位跟蹤及遠程遙測與遙控,以及小型化水下航行體的實用性等實際需求,開展小型化、多功能同步編碼聲源技術研究,以滿足小型水下航行體對聲源系統的集成化、多功能,以及便攜匹配安裝等需求。
1 系統設計
對于小型化水下航行體的定位跟蹤及綜合測控系統來講,水聲基陣接收端可采用多種形式,但配套聲源系統成為了關鍵設備,需解決小型、輕量化與多功能、長時獨立工作之間的矛盾平衡問題。該聲源系統主要設計輸入是,小型水下航行體的實時水聲定位跟蹤、水聲遙測,以及應急水聲遙控等實航測試及操控需求。除了需要滿足小型水下航行體的小型、輕量化安裝要求外,還需滿足1 000 m 海深的獨立工作條件,具備實時水聲定位跟蹤匹配聲信號發射,具備水下航行體姿態參數的編碼發射,以及接收遠程水聲指令完成相應的控制命令等功能,屬于綜合測控聲源系統。
水下便攜式可應答同步編碼聲源系統主要由小型聲源和配套綜合調試設備兩部分組成。小型聲源安裝在被測水下目標上,獨立完成相應的水聲定位、水聲遙測及水聲遙控等功能,綜合調試設備主要用于聲源的工作參數設置,試前同步等相關操作,同時亦為聲源配套的水面的操控平臺。如單獨作為水聲定位跟蹤使用,可在試前對小型聲源進行同步及設定后,由聲源自行保持同步狀態,脫離綜合調試設備獨立工作。系統原理框圖如圖1 所示。
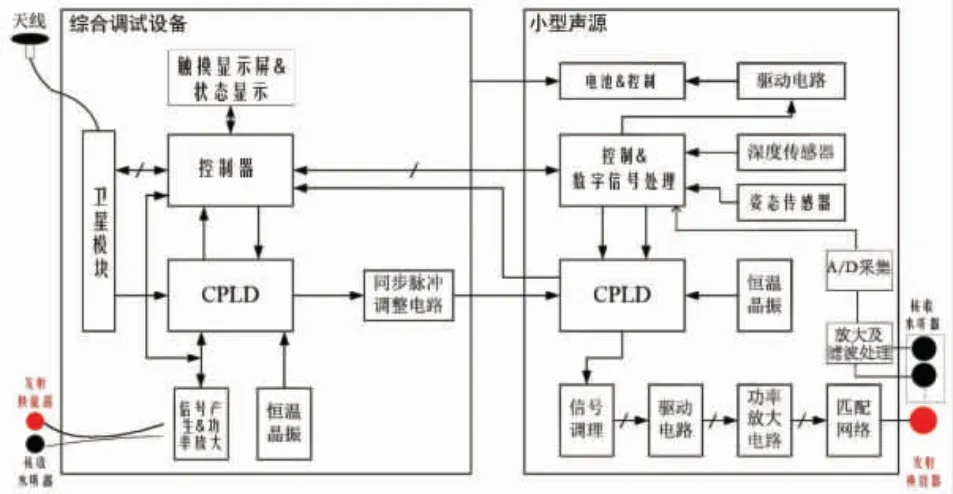
圖1 系統原理框圖
如圖1 所示,小型聲源安裝在水下目標上獨立工作,綜合調試設備在試前通過電纜與小型聲源進行連接,對聲源的工作參數進行設置,如工作模式、工作頻段、聲源編碼等。同時,利用GPS(Global Positioning System)等衛星信號處理后進行聲源的時鐘同步后,利用內部高穩晶振加相應處理算法,確保聲源內部時鐘與水聲基陣接收端一致,進一步確保水聲定位跟蹤精度。
該方案與水聲工程中常規聲源或應答器設計方法不同的是:(1)小型聲源在小尺寸基礎上集成深度、姿態等傳感器,集成高效能電池及相關控制與處理功能,可設置為同步或應答兩種定位模式,同時設計有全雙工通道,即在定位跟蹤過程中可實時接收水面聲學查詢等命令并對其應答和執行;(2)考慮到多個水下目標的實航測試,設計聲源可在試前進行單獨編碼設置,即給每個水下聲源賦予唯一的編號,滿足多目標水聲定位測控需求;(3)綜合調試設備與常規單純試前設置不同的是,不僅完成對聲源的試前設置,還具備試中聲源狀態查詢和全雙工應答與通訊功能。
1.1 組成及原理
小型聲源和配套綜合調試設備是聲源系統的主要組成部分(圖2)。綜合調試設備采用組合式設計方案,集成應答與顯控功能,基本原理不做詳述。小型聲源主要由組合換能器、電子水密艙、深度傳感器、姿態傳感器和調試接口組成。設置為應答定位模式,則自動接收查詢信號進行應答;反之為同步式,試前需進行同步設置。聲源在具體工作中可通過綜合調試設備進行全雙工進行查詢與遙控,為水下目標的航行安全提供應急操控手段。

圖2 系統工作連接示意圖
如圖2 所示,綜合調試設備上電后選擇小聲源同步模式,之后進行高精度恒溫晶振預熱,以保證小型化聲源內部時鐘工作穩定。預熱完成之后自動進行同步設置,并自動檢測同步是否成功,如同步失敗將自動重新進行同步設置,并將相關信息反饋給綜合調試設備進行顯示。聲源內部組成結構如圖3 所示。
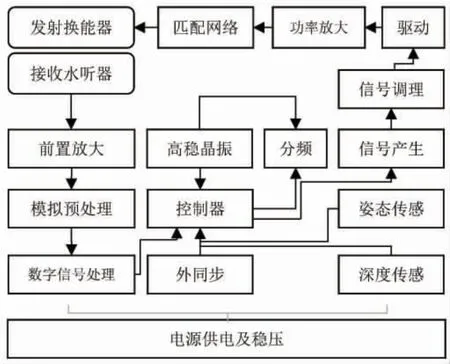
圖3 聲源內部組成結構框圖
聲源具體設置時可選同步、應答和讀數3 種方式。讀數模式主要是為了讀取聲源在水下工作時實時解算的深度、姿態等傳感器原始信息,便于試后分析和比對;同步模式即為常規高精度同步式水聲定位跟蹤模式,為水下小型航行體提供位置信息;應答式為查詢和應答回復模式的定位跟蹤,實際會受限于水聲基陣的查詢情況。
1.2 聲源信標結構
該聲源系統能將水聲定位跟蹤和水聲遙測遙控功能進行集成一體化設計,主要是設計了一種以時頻編碼結合信道糾錯編碼的聲信標結構。
該信標結構不僅充分考慮多個水下目標之間的聲信號干擾和自身的碼間信號干擾,還在大量試驗測試數據的基礎上,從信標結構上降低水聲信道的多途反射疊加和多普勒影響。同時,考慮湖海聲信道的差異化設計,以及實際工程的可實現性(如聲源的占空比、實際功率等)。以同步式聲源為例,其信標結構如圖4 所示。
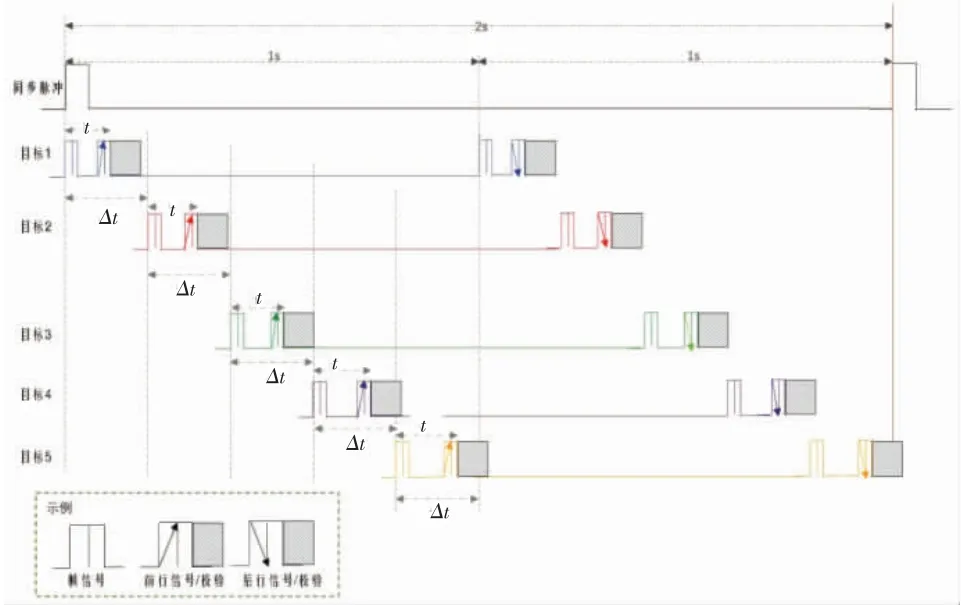
圖4 同步式聲源信標結構示意圖
如圖4 所示,同步脈沖為系統工作的統一時序基準,目標1~5 代表了5 個不同的水下航行體。其中t和Δt均為動態編碼調整參數,隨著遙測遙控信息或者不同目標位置等實時信息進行一定規則下的調整。
1.3 聲源安裝結構
當前水下航行體除了類似于水下無人集群形式外,同時也在小型化、低噪聲、遠程長航時等方向發展,應用方向覆蓋環境監測、水下安防及相關軍事攻防等相關專業。聲源系統除兼顧常規大中型水下航行體綜合測控要求外,主要針對小型水下航行體的適應性安裝與使用。因此,聲源系統的安裝結構設計需綜合考慮,在小型輕量化的基礎上兼顧通用性和實用性。該聲源系統采用一體式為主,分體式為輔的結構形式,其安裝結構如圖5 所示。
圖5 聲源安裝結構示意圖
如圖5 所示,小型聲源尺寸是直徑為70 mm,長度為200 mm,重量為1.45 kg,即可獨立安裝在水下小型航行體上,亦可分體安裝在航行體內,解決小型水下航行體的適配安裝問題。同時考慮到航行體的外部整體結構流體性,可將聲源的換能器陣替換為共形結構(圖5-b)。確保聲源安裝后,不存在常規凸起結構,從而不對水下航行體的航行造成擾流等干擾。
2 關鍵技術分析
水下便攜式可應答同步聲源系統關鍵技術為信號產生、功率放大,以及樣機研制兩部分。其中信號產生中除了精確產生所需編碼信號外,還需保證在同步工作模式下下長時工作穩定性,確保同步精度;功率放大需兼顧 18~36 kHz 與 9~14 kHz 兩個較寬頻帶的帶內平坦;需要綜合平衡聲源功能及性能與結構、重量、工作時長之間的矛盾,研制原理樣機,并進行實航測試。
2.1 信號產生與功率放大
水聲定位跟蹤中實際工程中,常采用頻率、相位等調制方式,對于聲源產生來說,多以單頻和調頻信號為主[10],結合相應的編碼算法獲得最終聲源發射所需信標信號。因此,聲源系統中信號產生必須精確且高效。
為實時高精度產生信標,采用直接數字頻率合成(Direct Digital Synthesis,DDS)原理構建信號發生器,DDS 是一種基于抽樣定理的二維模擬信號與數字信號的轉化,其本質是通過相位量化進行頻率合成,具有頻率分辨率高、頻率捷變時間短、波形失真小等優點[11-12]。DDS 主要由頻率控制字、相位控制字、相位累加器、波形存儲器、數模轉換器,以及低通濾波器組成,原理結構如圖6 所示。
圖6 DDS 信號產生及相位累加原理框圖
如圖6 所示,統一在系統時鐘fc的觸發下工作,其相位累加器是DDS 的核心組成部分。相位累加器由N位加法器和N位相位寄存器構成,產生尋址波形存儲器的數字序列,數字序列范圍從0 到累加器的滿偏值。初始狀態將相位控制字P送給寄存器,它決定所產生波形的起始相位。當信號產生時,每來一個時鐘加法器將頻率控制字K與寄存器輸出數值進行相加,再把相加后的結果送給寄存器數據輸入端,寄存器將相位數據返回到加法器數據輸入端準備進行下次與頻率控制字的相加,同時產生尋址波形存儲器所需的地址序列。當相位累加器超過滿偏置時就產生一次溢出,完成一個周期動作,詳見圖4。
設計中將頻率控制字設為K,參考時鐘為fc,相位累加器位數為N,將一個周期的余弦信號幅值編碼存儲在波形存儲器中,則第n周期相位累加器輸出序列為:

波形存儲器輸出序列為:

根據式(2)中輸出信號展開傅立葉級數表達式為:

其中,將式(3)中只取實部表示為s(t)的三角函數形式為:
從式(3)和式(4)可以看出,輸出信號除包括主頻f0,還存在頻率分布為fc±f0,2fc±f0,……的非諧波分量,因此為得到主頻為f0的信號,還需在DAC 輸出端加截止頻率為fc/2 的低通濾波器。
DDS 產生的信號頻率為:

式中:當K為1 時DDS 輸出頻率最低,根據奈奎斯特定律DDS 最大輸出頻率可達fc/2,但實際情況下為保證輸出精度,規定每個周期最低采樣精度8個點,于是K最大值為2N/8,輸出最大頻率為fc/8。
信號頻率分辨率為:

DDS 模塊通過可編程邏輯器件構建,FPGA 通過設置DDS 模塊頻率控制字和相位控制字來改變輸出信號。考慮到實際工程中對聲源主要指標的調整需要,聲源系統中信號產生部分以FPGA 為主,在傳統DDS 結構基礎上,引入參數調整模塊,通過FPGA 編程,靈活實現各類調制信號的產生,并能通過參數傳輸方式對載波抑制和輸出功率進行實時調整,具有結構簡單、調試便捷等特點。
功率放大組件采用線性功放結構,與常規開關功放相比較,線性功放發射電壓便捷可調、適應與匹配性好,工作可靠性高,并且容易與前級調制電路匹配,不易產生脈沖諧波干擾[13]。因此,這里采用線性功率放大,同時加上橋式功放結構,進一步提高發射功率,進而提高聲源級。具體通過控制前級輸入信號大小來調節輸出信號,從而控制所發出聲信號強度。功率放大組件主要由于信號驅動級、功率放大級和匹配網絡三部分組成,信號驅動級由增益控制和推挽驅動將電信號調整到合適的范圍,并保證有足夠的驅動電流;功率放大級由大功率器件和變壓器將信號放大到足夠的功率輸出;匹配網絡為LC 電路[14],使不同頻率信號輸出效率達到最優。
2.2 樣機研制
水下便攜式可應答同步聲源主要安裝在小型水下航行體上,除滿足試驗測試及應急操控等安全措施等要求外,亦不能較大影響航行體水下航行性能。相對來說要求聲源發射聲源級高,工作時間長,體積小,重量輕,如按照常規設計方法很難實現。
本文采用了一體化集成式設計方案,大規模壓縮電路尺寸。對電路功耗、抗干擾性、功率放大電路所需的線圈、電容及匹配電路進行了充分計算,并盡可能減小所有器件及組件的尺寸合眾路。如采用容量較高的鋰聚合物電池,利用高精度恒溫晶振替代傳統銣鐘、銫鐘等大尺寸時鐘源等。聲源實物如圖7 所示。
圖7 聲源實物圖
如圖7 所示,為了滿足深海1 000 m 的使用環境條件,同時降低整體重量,聲源的水密艙選用TC4鈦合金材料,同時具備良好的耐腐蝕性能。聲源樣機尺寸是直徑為70 mm,長度為200 mm,重量為1.45 kg;實際測試連續工作時長為12 h(1 s 周期,12 h 后聲源級降低3 dB);深海工作深度采用壓力釜進行12.5 Mpa 的水壓測試,確保滿足深海1 000 m 的實際使用要求。綜上所述,設計與研制的聲源系統,尤其是直接安裝在小型水下航行體上的聲源滿足實際安裝所需條件,滿足設計輸入的相關技術指標。
3 試驗測試
該聲源系統研制完成后,經過相應可靠性及環境試驗,具備實航測試條件。具體以某小型民用滑翔機為載體,在國內某水域進行實航測試。為了確保水聲定位測量的精度和數據率,本次實航試驗以同步式模式為主。首先,在小型滑翔機上安裝水下聲源,試前利用綜合調試設備進行參數與同步設置;同步完成后,該聲源進入等待入水進行同步工作;入水后,聲源檢測如水傳感器及深度傳感器,滿足綜合判斷條件后,聲源發射同步定位信標信號;水聲定位跟蹤系統實時進行水下小型滑翔機的定位測量,完成本次實航試驗。實航水聲定位跟蹤結果如圖8 所示。
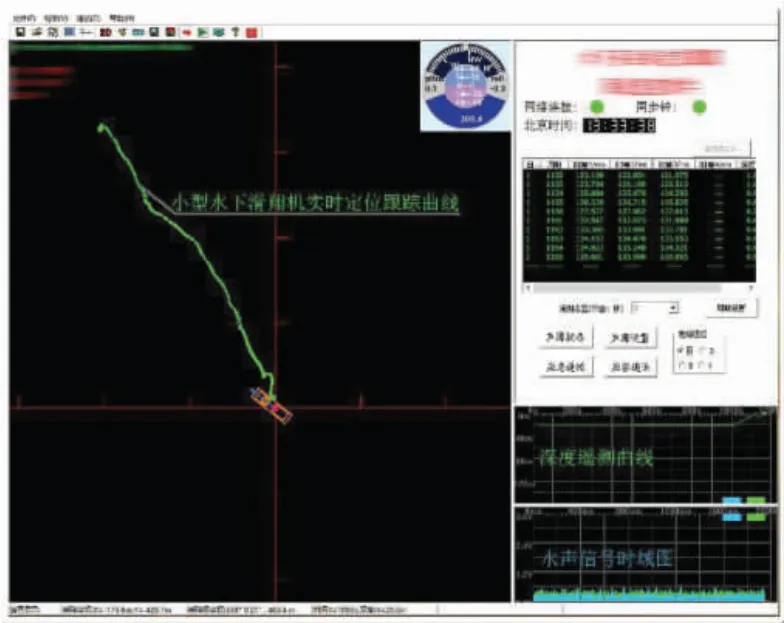
圖8 實航試驗測量結果圖
如圖8 所示,本文研制的小型聲源可滿足常規小型水下航行體的匹配安裝要求,并在國內某水域進行實航試驗。試驗結果證明,該聲源配合某型水聲定位跟蹤系統可實現超過3 km 范圍內實時定位跟蹤,其定位精度可達5‰,航行參數的水聲遙測誤碼率可達10-5。由此可見,該聲源系統實時水聲定位跟蹤精度高(發射的聲信號質量好,時延精度長時可靠)、測量數據連續可靠,距離較遠(聲源級較高),并且相應應答控制滿足全雙工要求,具有良好的工程實用性。
另外,該聲源還在大型水下航行體的實航試驗中配套完成相應測試驗證,為多型水下航行體的實航試驗與水下作業提供配套定位設備。
4 結論
針對小型水下航行體試驗測試及水下作業實際需求,開展水下便攜式可應答同步聲源系統技術研究。采用鈦合金一體式結構封裝聲源內部高度集成的電子設備及電池,利用收發合置換能器時頻編碼方式實現全雙工定位脈沖發射與遠程水聲命令信息的接收。
通過某小型水下滑翔機的湖上實航試驗,試驗證明該聲源系統功能及性能指標均滿足設計輸入的具體要求。該聲源系統與國外同類產品(UM-8370)相比較具有體積小、重量輕,便于安裝等特點,同時具備水聲定位聲信號受控發射,以及全雙工水聲應答與水聲遙測、遙控等復雜功能。除可應用與多種小型水下航行體的水下定位測量外,亦可在中、大型水下航行體上便捷安裝,特別是近年來結合水下無人作戰平臺與水下集群技術發展[15],為該聲源系統的應用場景提供了廣闊空間。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25