基于Labview的三容水箱液位控制系統設計
2020-08-24 04:15:24曹紀中
沈陽化工大學學報 2020年2期
李 凌, 曹紀中, 王 璐
(1.沈陽化工大學 信息工程學院, 遼寧 沈陽 110142;2.沈陽化工大學 計算機科學與技術學院, 遼寧 沈陽 110142)
在很多化工和制造業的工藝中,液位控制是一項重要的測量指標,是衡量產品質量與安全系數的重要考量[1].為模擬實際工業環境中多慣性環節的復雜系統,常用多容水箱作為研究對象,以多容水箱為研究背景,針對水箱模型采用不同的控制方法和控制策略來實現更好地控制效果.目前最常見的針對三容水箱所代表的三階慣性環節常用的控制方式是獨立回路控制和兩層串級PID控制[2].獨立回路控制是將三容水箱分隔成單容與雙容或三個單容,采用獨立回路來控制多容水箱;兩層串級PID控制是使主回路控制主要控制變量(常為下水箱),副回路控制其他控制變量.雖然目前對三容水箱的控制策略已經逐漸發展,但是其控制效果中動態性能不理想,尤其是調節時間過長,超調量常突破閾值[3].因此需要針對以三容水箱為代表的三階慣性系統提出新的控制策略.本文采用三層串級PID來控制三容水箱,采用Labview軟件進行系統設計.對水箱模型采用機理建模法進行建模,再將模型放入Simulink中,驗證其在不同控制方案下的理論可行性并整定PID參數,針對Labview軟件的前面板進行設計,實現三容水箱的三層串級PID控制.本文研究驗證了針對三容水箱的三層串級控制的可行性;Labview程序界面的編輯更貼近實際設計,這種可視化的仿真成果相比于單獨Simulink仿真也更貼近實際環境,對工業中完全自主開發的液位控制具有參考價值.
1 三容水箱數學模型的建立
1.1 水箱系統介紹
水箱系統模型如圖1所示,自上而下依次為上、中、下3個水箱,上水箱存在1個輸入和1個輸出,中、下水箱分別存在2個輸入和1個輸出,分別使用閥1~6控制.通過改變不同的閥門開關實現不同模型的實現.打開閥6和閥4,關閉其他閥門,可實現對下水箱的一階模型;打開閥5、閥3、閥4,關閉其他閥門,可實現對中、下水箱的雙容水箱的二階模型;打開閥1、閥2、閥3、閥4,關閉其他閥門,可實現上、中、下水箱的三容水箱的三階模型.
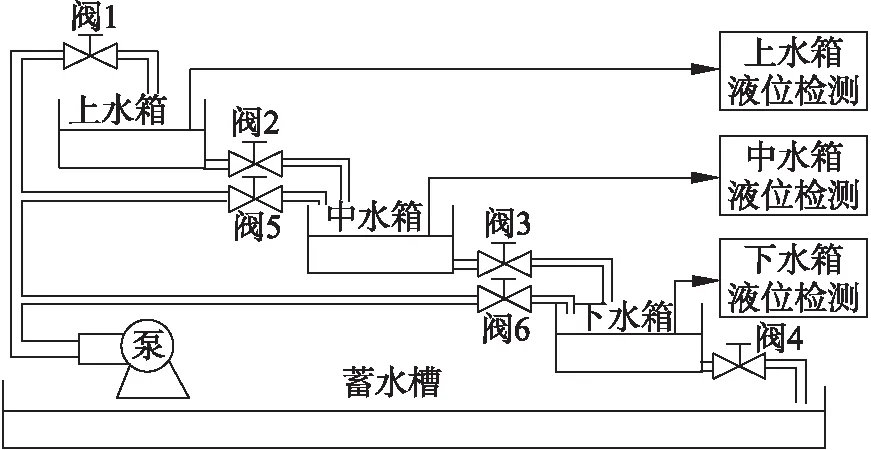
圖1 水箱系統模型示意圖
1.2 三容水箱機理建模法
針對三容水箱的建模方法采用機理建模法,通過機理分析水箱模型的物理特性,進而得到水箱的傳遞函數.三容水箱的機理模型如圖2所示.
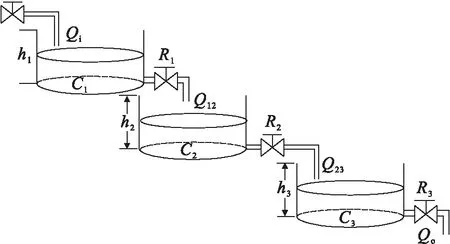
圖 2 三容水箱的機理模型
h1、h2、h3分別為上、中、下水箱液位高度;C1、C2、C3分別為上、中、下水箱底面積(液容),R1、R2、R3分別為上中下水箱液阻;Qi為流入上水箱的流量,Q12為上水箱流入中水箱的流量,Q23為中水箱流入下水箱的流量,Qo為下水箱流出的流量.液阻和液容定義為
(1)
(2)
由液阻定義得
(3)
(4)
(5)
由液容定義得
C1dh1=(Qi-Q12)dt,
(6)
C2dh2=(Q12-Q23)dt,
(7)
C3dh3=(Q23-Qo)dt.
(8)
帶入(3)、(4)、(5)得
(9)
(10)
(11)
即
(12)
(13)
(14)
兩邊進行拉氏變換
(R1C1s+1)H1(s)=R1Qi(s),
(15)
(R1R2C2s+R1)H2(s)=R2H1(s),
(16)
(R2R3C3s+R2)H3(s)=R3H2(s).
(17)
解得
(18)
設R1C1=T1,R2C2=T2,R3C3=T3,R3=K3,便可以得到三容水箱的三階模型
(19)
帶入實驗辨識后得到的系統參數即可得到三容水箱的數學模型
(20)
2 控制方法與控制策略研究
2.1 控制方法研究
PID控制作為工程中最常用的控制方法,適應于各種控制環節,使用也較為方便.本文主要研究PID控制在液位控制系統中的應用,包含PID控制算法和PID控制器工程參數整定.
2.1.1 PID控制算法
PID控制算法是比例、積分、微分環節的總稱.PID控制器的主要優勢是其結構比較簡單、實現也較為容易,因此PID控制器的使用范圍十分廣泛[4].PID參數是相互獨立的,這使得PID參數整定比較簡單,綜上所述PID控制器使用非常快捷便利.PID控制器的輸入信號與輸出信號關系式為
圖3為PID控制示意圖.
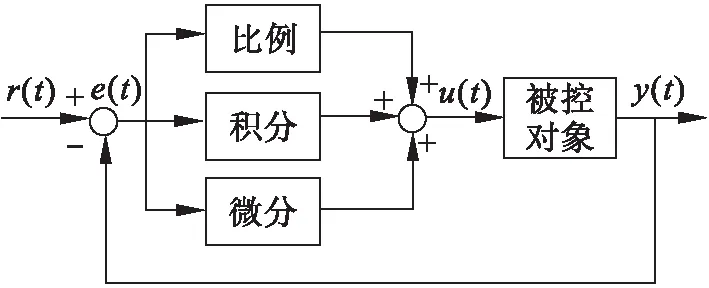
圖3 PID控制示意圖
2.1.2 PID控制器工程參數整定
PID參數整定的方法主要有經驗法、臨界比例度法、Z-N參數整定法、Simulink的PID參數自整定等[5].經驗法的整定結果較為粗糙,Z-N參數整定法適用于存在明顯滯后的自衡對象,這兩種方法并不適用于本文的研究對象.本文采用臨界比例度法整定PID參數,其步驟為:
(1) 切除I和D,取較小Kc,投入閉環仿真運行.
(2)Kc由小到大測試其變化,對應某一Kc時做小幅度設定值階躍響應,直至產生等幅振蕩.
(3) 設等幅振蕩周期為Tcr,控制器的增益為Kcr,采用表1整定PID參數.
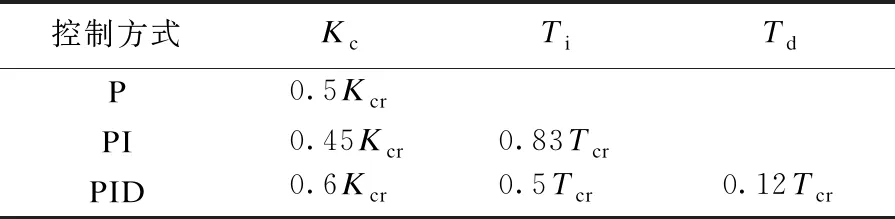
表1 臨界比例度法參數表
2.2 控制策略研究
三容水箱作為三階慣性系統,單回路控制下調節時間過長甚至無法穩定,所以針對三容水箱的控制方法最常用的是串級控制.本文針對三容水箱控制系統也采用串級控制,但不同之處在于采用3個副回路嵌套,使用這種方式來保證主回路的控制效果,其方框圖如圖4所示,圖4中Gp1、Gp2、Gp3分別代表3個被控對象,Gm1、Gm2、Gm3分別代表3個檢測變送環節,Gc1、Gc2、Gc3分別代表三個控制器,Gv代表執行器,hsp為設定值.
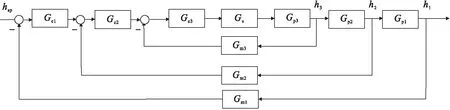
圖4 三容水箱方框圖
3 基于Simulink的水箱液位仿真
在圖1中,將上、中、下水箱都接入系統,便可得到一個三容水箱形成的三階系統.利用Simulink搭建其框圖便可以針對其進行仿真研究.為加強對上、中、下3個水箱的穩態與動態性能的控制,采用1個主回路,2個副回路的3層嵌套式串級控制系統.搭建的Simulink平臺如圖5所示,平臺搭建好后便可對該三層串級系統進行仿真運行.首先仍然是整定一個合適的PID參數,可利用Simulink自身的自整定功能和臨界比例度法相結合獲得一組合適的PID參數[6],如表2所示.
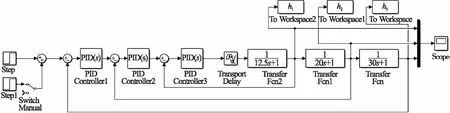
圖5 三容水箱串級仿真
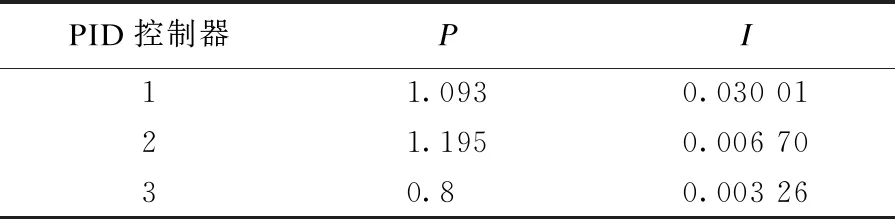
表2 PID參數
在整定了PID參數后,輸入一個固定的設定值1(相當于一個階躍信號),系統將自動跟隨設定值直至穩定.在確認穩定后添加一個階躍擾動(一個階躍信號值為0.5),再次觀察系統跟隨能力(抗干擾能力),結果如圖6所示.由仿真結果可以看出控制效果較為理想.上、中、下水箱的穩態溫差基本為零,動態性能也較好,已經基本滿足三容水箱的控制要求.
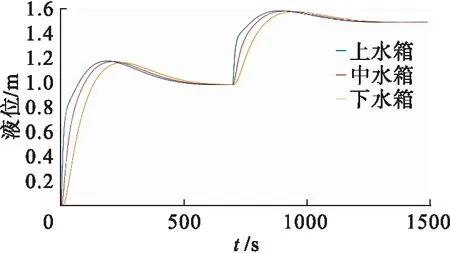
圖6 三容水箱串級仿真曲線
4 基于Labview的水箱液位控制系統設計
在基于Simulink的水箱液位仿真基礎上利用Labview軟件實現三容水箱的控制系統設計.采用三層嵌套式串級控制策略,PID控制方法.搭建的前面板和程序框圖如圖7和圖8所示[7].

圖7 三容水箱液位控制系統前面板
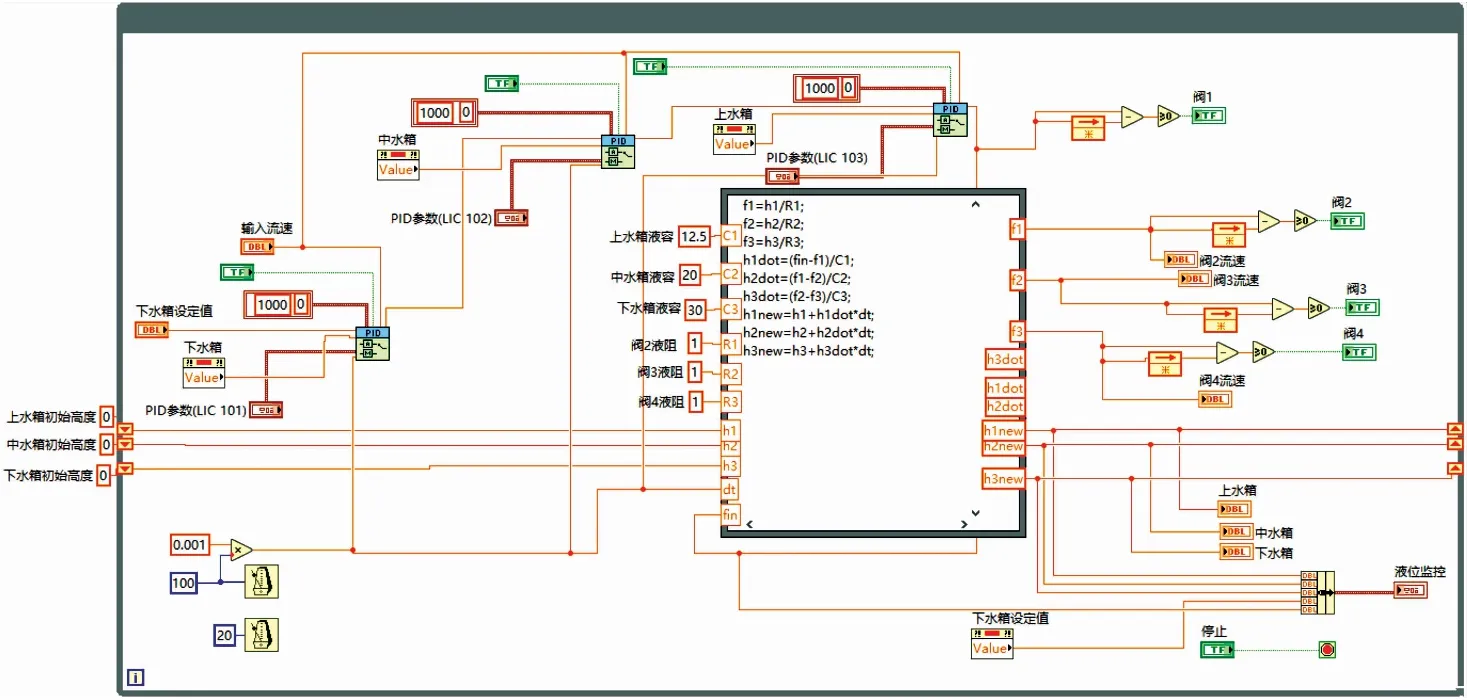
圖8 程序框圖
通過PID整定參數獲得一組最合適的PID參數,如表3所示.
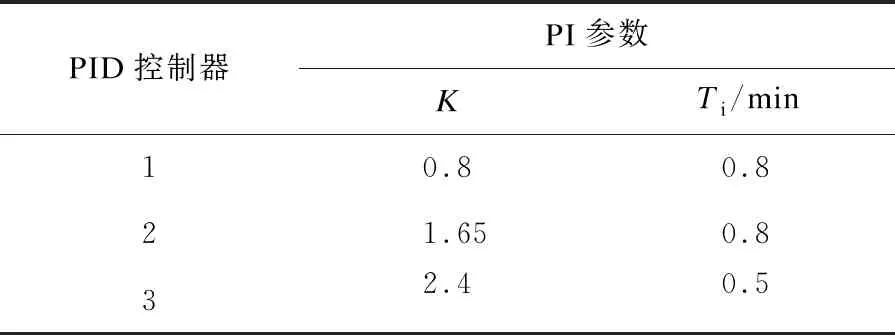
表3 PID參數
在表3的PI參數下,下水箱液位設定值為20 cm,自動投運系統,記錄曲線如圖9所示,其中最重要的下水箱液位曲線在最下端,可以看到控制效果較好.

圖9 投運曲線
系統穩定后,測試其跟隨情況,改變下水箱液位設定值為30 cm,記錄曲線如圖10所示,其中下水箱液位曲線仍在最下端,跟隨效果較好.上、中、下水箱動態性能如表4所示.從表4可以看出系統整體運行動態性能狀況良好,無穩態誤差.
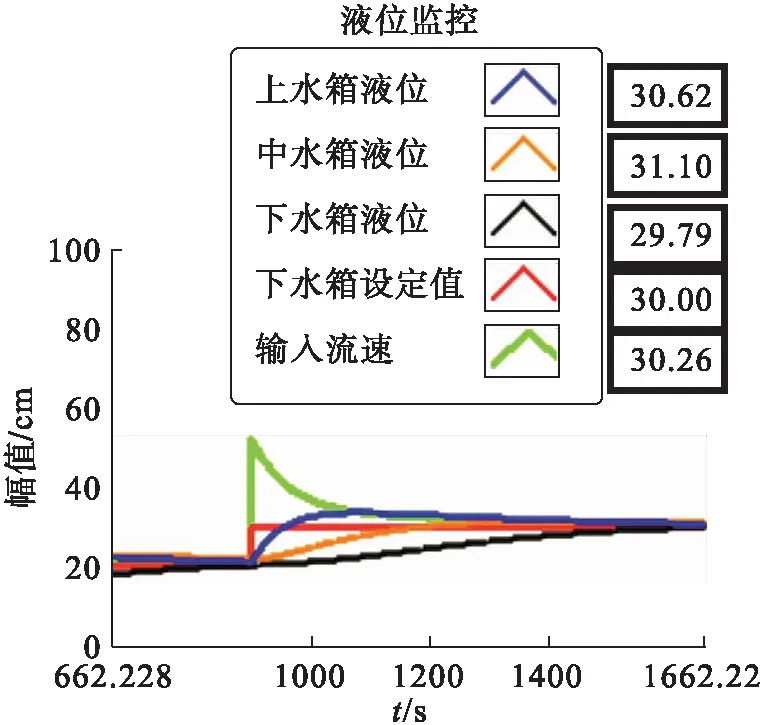
圖10 跟隨曲線
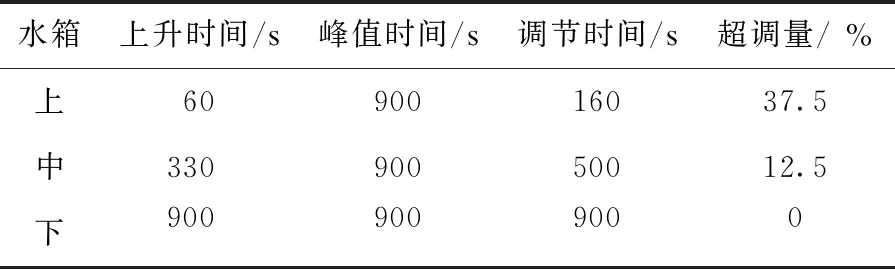
表4 動態性能比較
5 結 論
本文設計了基于Labview的三層串級控制三容水箱系統.從仿真投運結果可以看出:三層串級PID控制系統對三容水箱有較好的控制效果,基于Labview的系統設計符合了設計初衷,有很強的直觀性.相比較于已有的針對三容水箱的控制方法,三層串級PID控制較之獨立回路控制,其沒有割裂三階系統,同時擺脫了獨立回路控制所要求的水箱之間必須是可控制的調節閥的局限性.三層串級控制較之二層串級控制具有更強的針對主回路的保護,使得主回路的控制效果可以得到提升.通過本文研究設計可以得出兩條結論:第一是三層串級控制可以有效控制三容水箱,提升系統動態性能,同時對三階慣性系統的控制研究有一定的參考價值;第二是利用基于數據流和可視化的Labview軟件較之傳統的組態軟件可使控制系統的可視化程度得到提升[8],Labview軟件的使用程度還比較低,在可視化操作等方面可以進一步完善.如何在工業系統中實際投運三層串級控制需要進一步研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26