上肢康復機器人主動訓練模式控制策略研究
2020-08-25 02:06:42張孟旋王晨程劉慶運
機械工程與自動化 2020年4期
張孟旋,劉 濤,王晨程,劉慶運
(安徽工業大學 機械工程學院,安徽 馬鞍山 243000)
0 引言
腦卒中(中風)是由腦局部血液循環障礙所導致的神經功能缺損綜合癥[1],其治療方式通常采用醫師徒手治療并配以簡單的醫療設備輔助,難以滿足我國對康復醫療設備和人工康復資源的巨大需求[2]。因此,近年來國內外學者提出將機器人與康復醫學有機結合,利用機器人代替理療師輔助偏癱患者進行康復訓練[3]。
Noritsugu T等[4]基于阻抗控制算法,實現了二自由度康復機器人的多種物理治療模式;Akdogan E等[5]基于阻抗控制算法,實現了膝關節康復機器人的柔性控制,使得康復運動能夠得到較好的控制;Huang J等[6]利用氣動人工肌肉開發具有肩、肘、腕關節的四自由度康復機器人,可實現患者的被動康復訓練;潘禮正等[7]通過阻抗控制算法,實現了患者與機器人的柔性控制,保證了康復機器人的安全性和平穩性;巴凱先等[8]在足式仿生機器人的實驗平臺上驗證了基于力的阻抗控制相對于基于位置的阻抗控制具有更快的響應速度。
上述研究工作主要針對患者單關節的康復訓練,并且存在人機交互力跟蹤響應速度慢、控制精度低等問題,導致患者訓練的舒適度低,安全性能得不到保障。基于力的阻抗控制,力跟蹤能力強,能夠實現訓練的平穩性,賦予患者足夠的舒適度,符合人體的運動要求。考慮到患者主動參與康復訓練,對恢復病情具有關鍵作用,所以應采取以患肢為主的主動訓練模式。因此,本文基于力的阻抗控制算法,設計了面向單關節與多關節主動康復訓練的控制器。
1 上肢康復機器人建模
1.1 康復機器人運動學建模
本文提出的六自由度上肢康復機器人如圖1所示,結構設計滿足人體工程學與人體上肢解剖學的要求,能夠還原患者上肢的運動機構模型,可用于肩、肘和腕三大關節的康復訓練,從結構上實現患者訓練時的舒適性和平穩性。
根據圖1(a),釆用前置D-H法建立康復機器人的連桿坐標系簡圖,如圖1(b)所示。
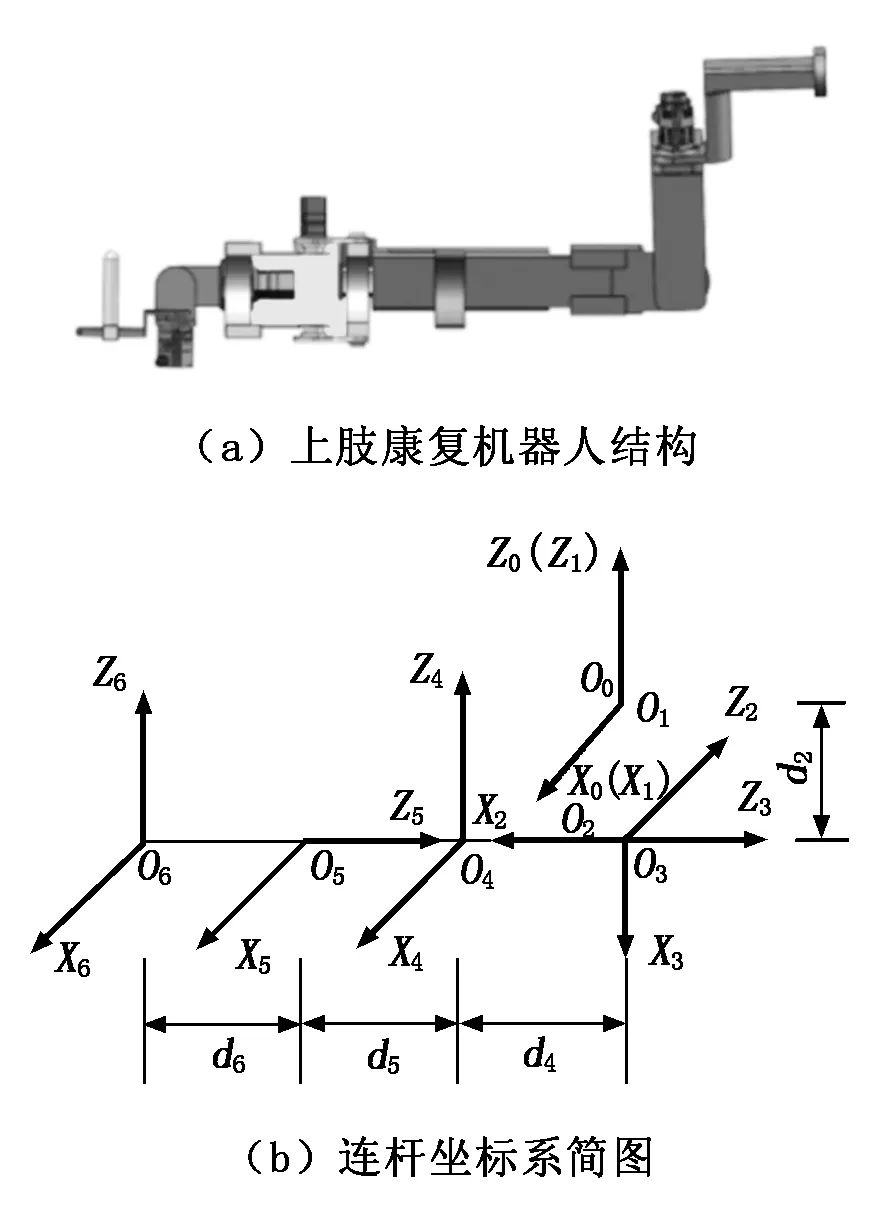
圖1 六自由度上肢康復機器人
機器人末端的位姿可由式(1)和式(2)求取:
(1)
T=A1A2A3A4A5A6.
(2)
其中:θi為旋轉關節的關節變量;di為關節偏移量;ai-1為連桿i-1的長度;αi為關節扭角;Ai為各連桿的D-H矩陣;s為sin;c為cos。
1.2 康復機器人動力學建模
本文利用Lagrange函數法建立了六自由度上肢康復機器人的動力學模型,并確定康復機器人關節輸出力矩的參數關系。針對旋轉運動,拉格朗日力學有如下兩個基本方程:
L=K-P.
(3)
(4)
其中:L為拉格朗日函數;K為系統動能;P為系統勢能;τi為系統輸出轉矩。
對于N關節機器人來說,由式(3)可得:
(5)

將式(5)代入式(4),可得拉格朗日動力學方程:
(6)
式(6)中有:
(7)
(8)
(9)

2 力阻抗控制器設計
阻抗控制的特點是不直接控制機器人與環境的作用力,而是根據機器人末端位置或速度與末端作用力之間的關系,通過調整阻抗參數,間接地達到控制力的目的,屬于柔順性控制。一般可以用下面的二階線性微分方程描述:
(10)

患者進行主動訓練時,患肢帶動康復機器人做康復運動,運動速度慢且平穩,加速度變化很小,因此忽略加速度對阻抗模型的影響。將阻抗控制算法運用到機器人的各關節空間中,可以有效地簡化系統。因此,在關節空間中,建立力阻抗控制模型:
(11)

考慮人機交互力矩、關節空載力矩和關節摩擦阻尼等因素的影響,建立的系統控制模型如圖2所示。
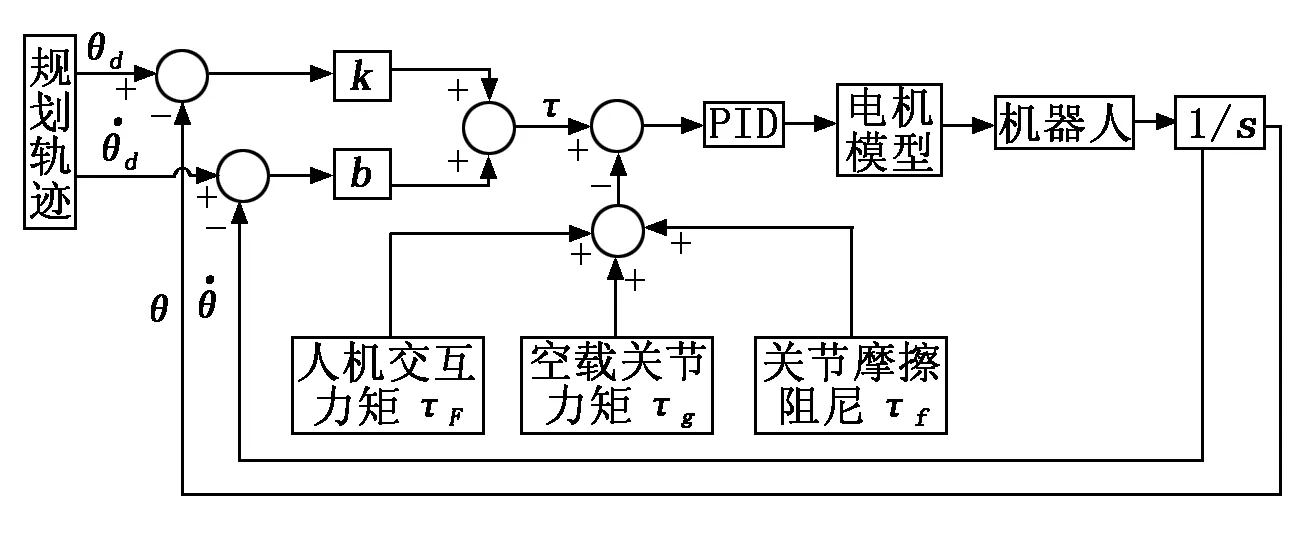
圖2 系統控制模型
3 仿真結果分析
根據上肢康復機器人系統控制模型,在Simulink中構建力阻抗控制器仿真框圖,如圖3所示。圖3中,τm為轉矩偏差。
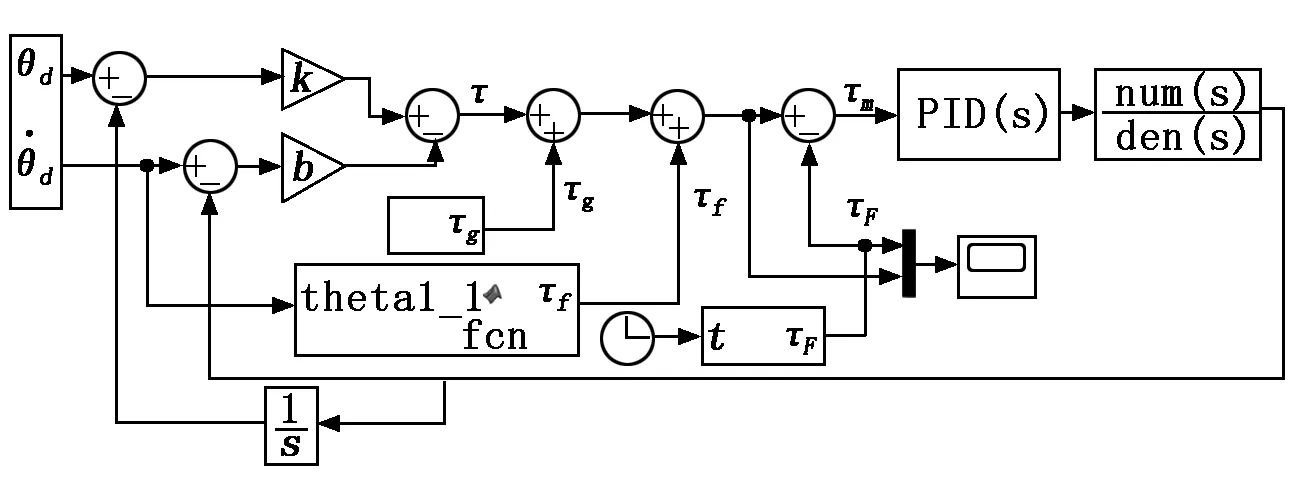
圖3 力阻抗控制器仿真框圖
針對肩關節擺/收的單關節主動康復訓練以及肩關節屈/伸和肘關節屈/伸的多關節主動康復訓練,基于第2節所設計的力阻抗控制器,在Simulink中進行仿真。考慮到人機交互力動態多變的情況,以階躍信號、斜坡信號、正弦信號三種不同狀態的交互力信號作為輸入進行仿真實驗,仿真結果如圖4~圖6所示。
由圖4可以看出:在t=1.0 s時基本上實現了對人機交互力的跟蹤,但仍存在一定的穩態誤差;圖4(a)、圖4(b)中,在t=1.5 s時,穩態誤差已維持在較小的范圍內;圖4(c)中,雖然在t=1.0 s時實現了對人機交互力的跟蹤,但是在波峰波谷處,仍存在一定的穩態誤差,說明控制器對變化頻率較快的人機交互力進行控制時存在穩態誤差無法消除的問題。由圖5、圖6中可以看出:肩的屈/伸關節與肘的屈/伸關節同時進行主動康復訓練時,控制器仍然可以在較短的時間內實現對人機交互力的跟蹤,能夠適應多關節協調運動時動力學模型變化等未知因素的影響,具有較強的魯棒性。
綜上,無論是單關節、還是多關節的主動康復訓練,力阻抗控制器在康復過程中都能迅速地對人機交互力作出響應,實現人機交互力的跟蹤。機器人具有較強的柔順性,使得患者擁有舒適的人機交互感,從而保證了患者主動訓練的安全性。
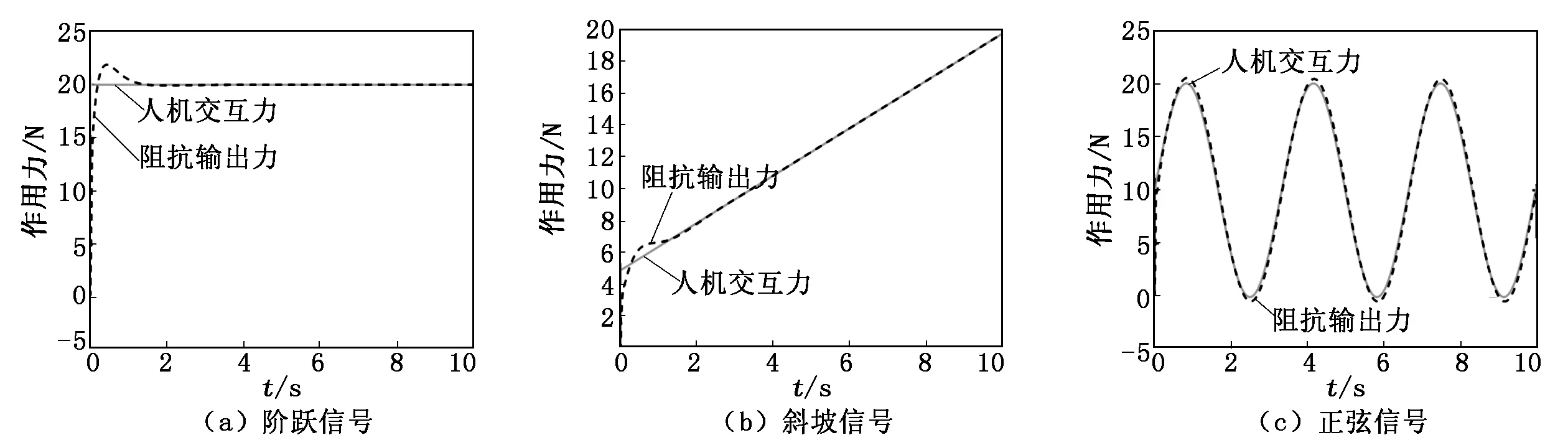
圖4 單關節(肩擺/收)力跟蹤曲線
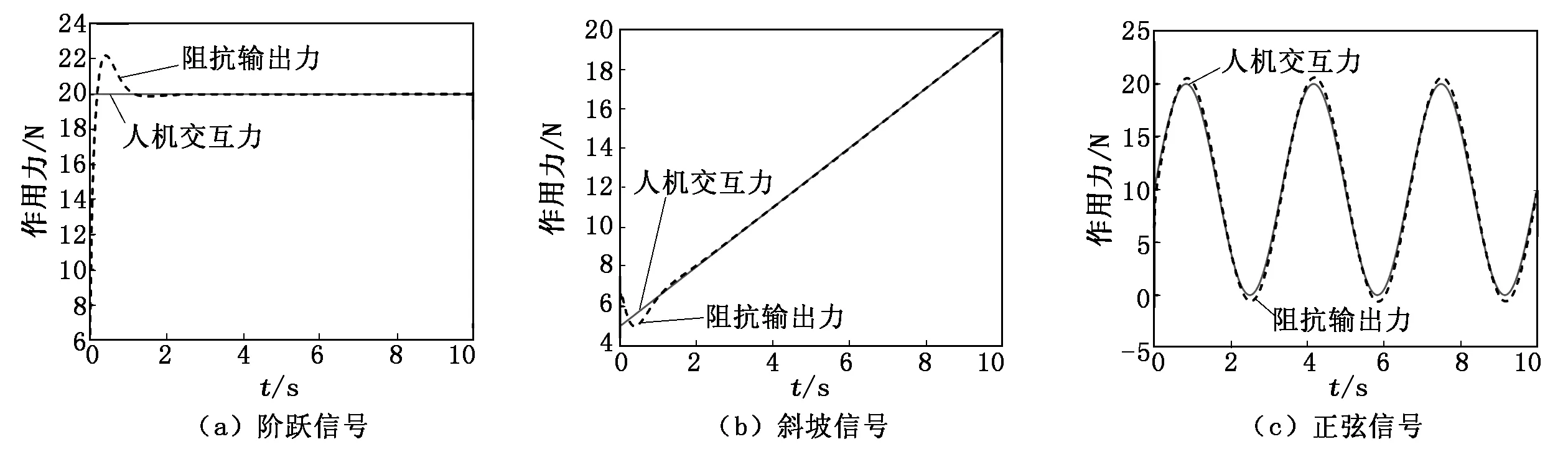
圖5 多關節(肩屈/伸)力跟蹤曲線
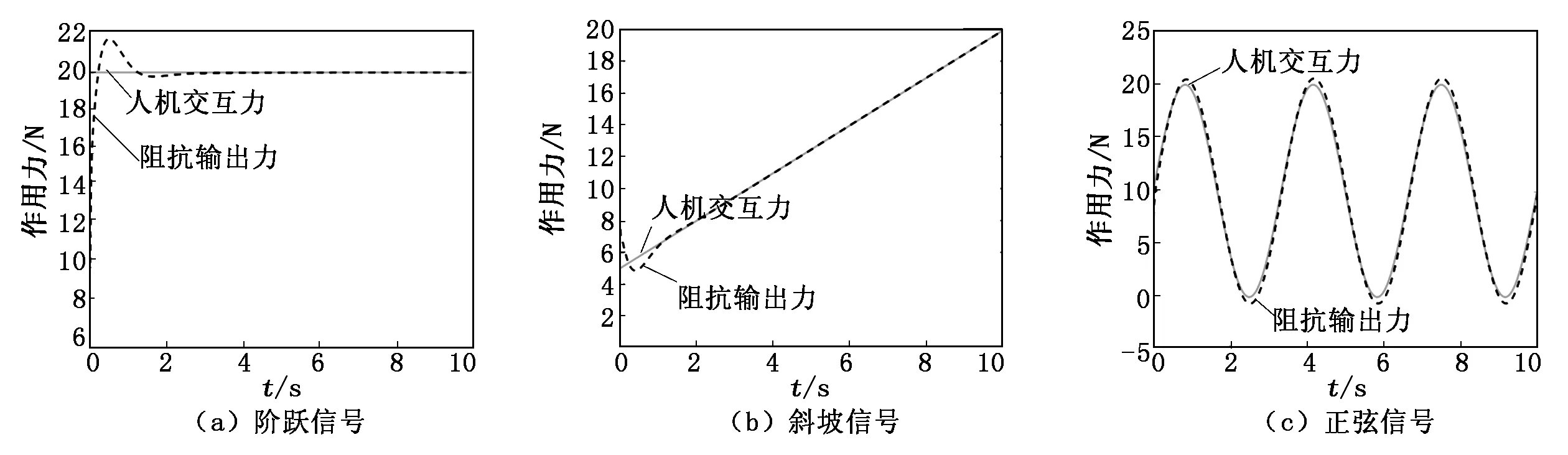
圖6 多關節(肘屈/伸)力跟蹤曲線
4 結論
本文在完成六自由度上肢康復機器人運動學與動力學分析的基礎上,基于力的阻抗控制算法,設計了面向單關節與多關節主動康復訓練的力阻抗控制器,仿真結果驗證了力阻抗控制器的可行性。對不同狀態的人機交互力跟蹤,控制器能滿足響應速度快、控制精度高的要求。同時,控制器能夠適應多關節協調運動時動力學模型變化和人機交互力動態多變等未知因素的影響,具有較強的魯棒性,從而保證了機器人的柔順性,給予了患者足夠的舒適度與安全性。但是,控制器對復雜變化的人機交互力跟蹤時,存在穩態誤差無法消除的問題,后續研究中需要解決。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14
