雙站交會(huì)測(cè)量精度分析與布站選擇
2020-08-25 02:03:16王克選
河南科技 2020年20期
王克選
摘 要:本文以交會(huì)測(cè)量中的最短距離法為基礎(chǔ),結(jié)合誤差傳遞定律,得出目標(biāo)空間位置的測(cè)量誤差公式。其間分析了兩種主要的誤差源——位置標(biāo)定誤差和角度測(cè)量誤差,在目標(biāo)相對(duì)基線的距離、基線長(zhǎng)度、目標(biāo)相對(duì)基線位置變化時(shí)對(duì)測(cè)量誤差的影響程度;通過(guò)對(duì)交會(huì)角度與測(cè)量誤差的仿真分析,提出了最小誤差球及最小誤差圓的概念;最后,針對(duì)雙站測(cè)量時(shí)的布站,提出了一些參考性的布站原則。研究結(jié)果對(duì)雙站交會(huì)測(cè)量有重要的參考價(jià)值。
關(guān)鍵詞:雙站交會(huì)測(cè)量;最短距離法;精度分析;布站選擇
中圖分類號(hào):P258文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1003-5168(2020)20-0135-04
Abstract: In this paper, based on the shortest distance method in the intersection measurement, combined with the error transfer law, the measurement error formula of the target space position was obtained. During this period, the degree of influence of the two main error sources (namely the position calibration error and the angle measurement error) on the measurement error was analyzed when the distance from the target to the baseline, the length of the baseline and the position of the target from the baseline changed; through simulation analysis of intersection angle and measurement error, the concepts of minimum error sphere and minimum error circle werr proposed; finally, for the layout of the two-station measurement, some reference layout principles were proposed. The research results have important reference value for the double-station intersection measurement.
Keywords: double-station intersection;shortest distance method;accuracy analysis;station selection
常用的定位測(cè)距方式有雷達(dá)測(cè)距、激光測(cè)距、電視紅外測(cè)距等。其中,雷達(dá)測(cè)距和激光測(cè)距量屬于主動(dòng)式測(cè)距法,而電視紅外測(cè)距屬于被動(dòng)式測(cè)距法[1]。電視紅外測(cè)距具有精度高、直觀性強(qiáng)、性能穩(wěn)定可靠、不受“黑障區(qū)”和地面雜波干擾的影響等優(yōu)點(diǎn),常用來(lái)對(duì)空間飛行目標(biāo)進(jìn)行航跡測(cè)量和定位,還經(jīng)常作為比較標(biāo)準(zhǔn),用來(lái)鑒定中精度無(wú)線電外側(cè)系統(tǒng)(如單脈沖雷達(dá)等)的精度[2]。
電視紅外測(cè)距一般由光電跟蹤設(shè)備實(shí)現(xiàn)。光電跟蹤設(shè)備由電視或紅外鏡頭和伺服轉(zhuǎn)臺(tái)等組成,具有實(shí)時(shí)測(cè)量和自動(dòng)跟蹤功能。單站光電跟蹤設(shè)備只能獲得空間目標(biāo)的二維坐標(biāo)信息,即空間目標(biāo)所在位置相對(duì)觀測(cè)站的方位角和高低角。為了獲得目標(biāo)位置的三維信息,常以多站交會(huì)的方式測(cè)量確定目標(biāo)的空間位置[3]。而采用交會(huì)測(cè)量的方式,最小的站點(diǎn)需求是雙站。
雙站測(cè)量通過(guò)兩臺(tái)位置已知的光電跟蹤設(shè)備,分別測(cè)出同一時(shí)刻目標(biāo)相對(duì)本站的角度信息,然后通過(guò)空間幾何關(guān)系求解出目標(biāo)相對(duì)本站的空間三維坐標(biāo)。
1 雙站交會(huì)測(cè)量原理
1.1 交會(huì)測(cè)量原理
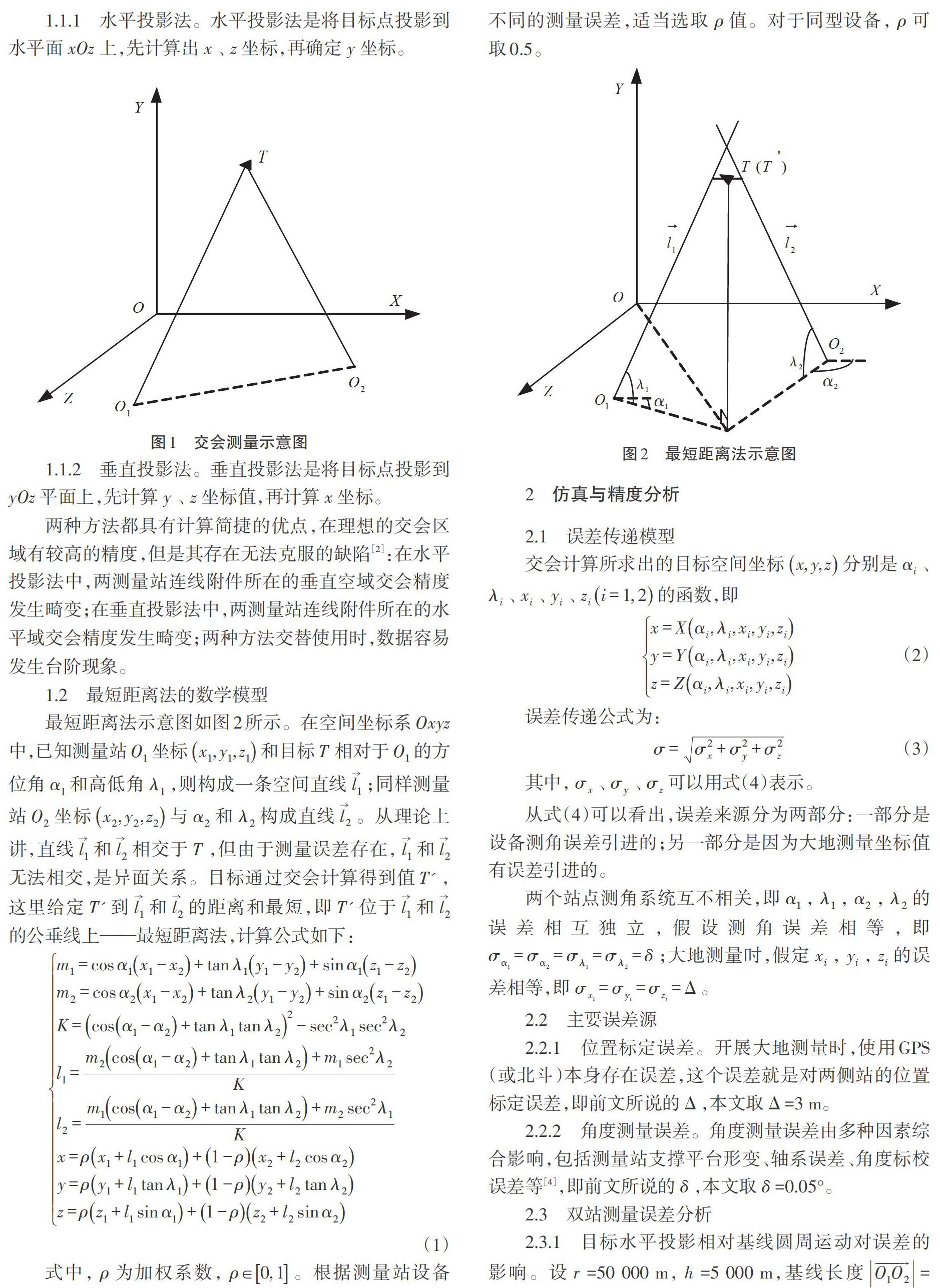
交會(huì)測(cè)量原理如圖1所示。
1.1.1 水平投影法。水平投影法是將目標(biāo)點(diǎn)投影到水平面[xOz]上,先計(jì)算出[x]、[z]坐標(biāo),再確定[y]坐標(biāo)。
1.1.2 垂直投影法。垂直投影法是將目標(biāo)點(diǎn)投影到[yOz]平面上,先計(jì)算[y]、[z]坐標(biāo)值,再計(jì)算[x]坐標(biāo)。
兩種方法都具有計(jì)算簡(jiǎn)捷的優(yōu)點(diǎn),在理想的交會(huì)區(qū)域有較高的精度,但是其存在無(wú)法克服的缺陷[2]:在水平投影法中,兩測(cè)量站連線附件所在的垂直空域交會(huì)精度發(fā)生畸變;在垂直投影法中,兩測(cè)量站連線附件所在的水平域交會(huì)精度發(fā)生畸變;兩種方法交替使用時(shí),數(shù)據(jù)容易發(fā)生臺(tái)階現(xiàn)象。
1.2 最短距離法的數(shù)學(xué)模型
最短距離法示意圖如圖2所示。在空間坐標(biāo)系[Oxyz]中,已知測(cè)量站[O1]坐標(biāo)[x1,y1,z1]和目標(biāo)[T]相對(duì)于[O1]的方位角[α1]和高低角[λ1],則構(gòu)成一條空間直線[l1];同樣測(cè)量站[O2]坐標(biāo)[x2,y2,z2]與[α2]和[λ2]構(gòu)成直線[l2]。從理論上講,直線[l1]和[l2]相交于[T],但由于測(cè)量誤差存在,[l1]和[l2]無(wú)法相交,是異面關(guān)系。目標(biāo)通過(guò)交會(huì)計(jì)算得到值[T'],這里給定[T']到[l1]和[l2]的距離和最短,即[T']位于[l1]和[l2]的公垂線上——最短距離法,計(jì)算公式如下:
從式(4)可以看出,誤差來(lái)源分為兩部分:一部分是設(shè)備測(cè)角誤差引進(jìn)的;另一部分是因?yàn)榇蟮販y(cè)量坐標(biāo)值有誤差引進(jìn)的。
兩個(gè)站點(diǎn)測(cè)角系統(tǒng)互不相關(guān),即[α1],[λ1],[α2],[λ2]的誤差相互獨(dú)立,假設(shè)測(cè)角誤差相等,即[σα1=σα2=σλ1=σλ2=δ];大地測(cè)量時(shí),假定[xi],[yi],[zi]的誤差相等,即[σxi=σyi=σzi=Δ]。
2.2 主要誤差源
2.2.1 位置標(biāo)定誤差。開展大地測(cè)量時(shí),使用GPS(或北斗)本身存在誤差,這個(gè)誤差就是對(duì)兩側(cè)站的位置標(biāo)定誤差,即前文所說(shuō)的[Δ],本文取[Δ]=3 m。
2.2.2 角度測(cè)量誤差。角度測(cè)量誤差由多種因素綜合影響,包括測(cè)量站支撐平臺(tái)形變、軸系誤差、角度標(biāo)校誤差等[4],即前文所說(shuō)的[δ],本文取[δ]=0.05°。
2.3 雙站測(cè)量誤差分析
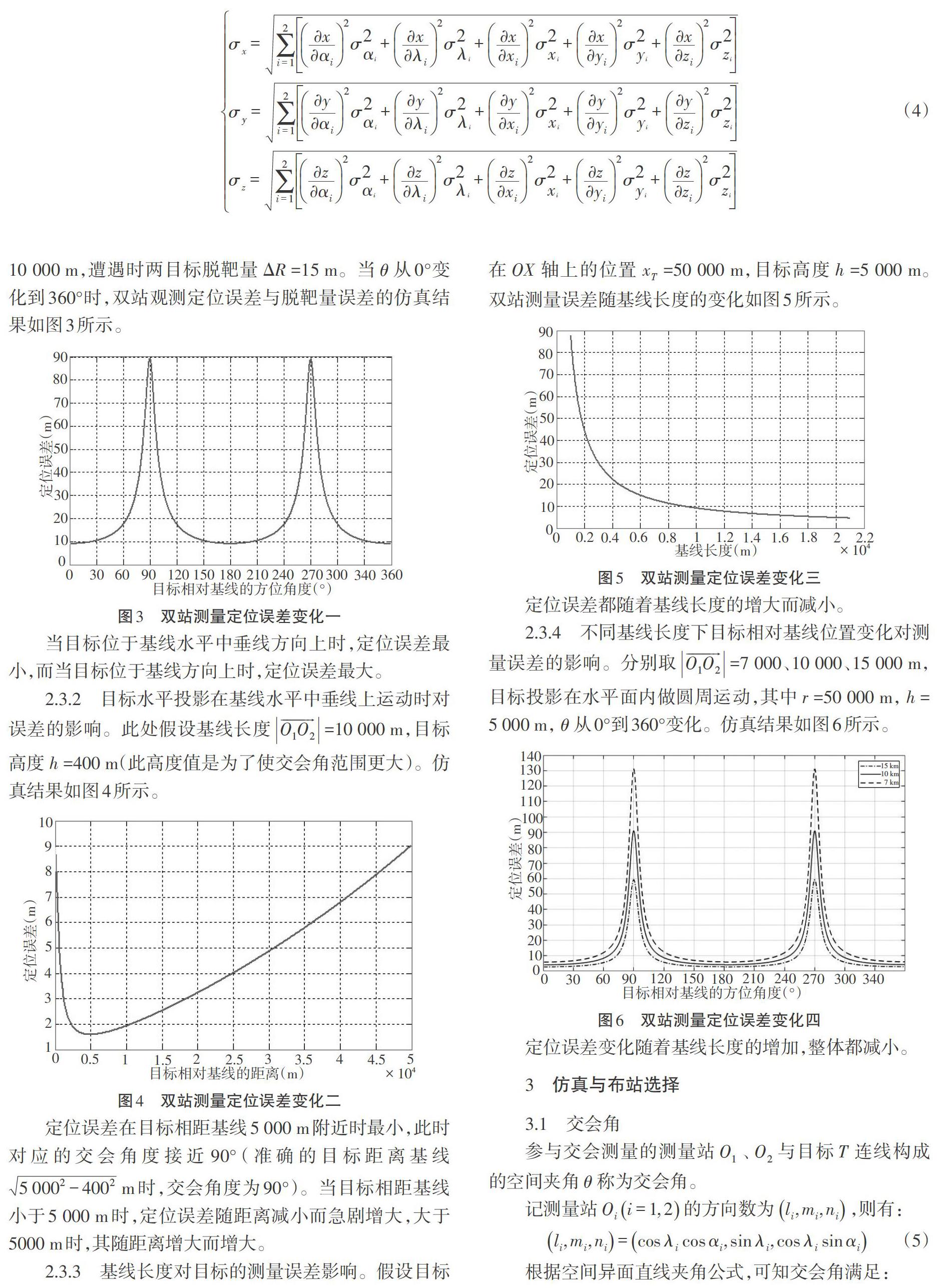
2.3.1 目標(biāo)水平投影相對(duì)基線圓周運(yùn)動(dòng)對(duì)誤差的影響。設(shè)[r]=50 000 m,[h]=5 000 m,基線長(zhǎng)度[O1O2]=10 000 m,遭遇時(shí)兩目標(biāo)脫靶量[ΔR]=15 m。當(dāng)[θ]從0°變化到360°時(shí),雙站觀測(cè)定位誤差與脫靶量誤差的仿真結(jié)果如圖3所示。
當(dāng)目標(biāo)位于基線水平中垂線方向上時(shí),定位誤差最小,而當(dāng)目標(biāo)位于基線方向上時(shí),定位誤差最大。
2.3.2 目標(biāo)水平投影在基線水平中垂線上運(yùn)動(dòng)時(shí)對(duì)誤差的影響。此處假設(shè)基線長(zhǎng)度[O1O2]=10 000 m,目標(biāo)高度[h]=400 m(此高度值是為了使交會(huì)角范圍更大)。仿真結(jié)果如圖4所示。
定位誤差在目標(biāo)相距基線5 000 m附近時(shí)最小,此時(shí)對(duì)應(yīng)的交會(huì)角度接近90°(準(zhǔn)確的目標(biāo)距離基線[5 0002-4002]m時(shí),交會(huì)角度為90°)。當(dāng)目標(biāo)相距基線小于5 000 m時(shí),定位誤差隨距離減小而急劇增大,大于5000 m時(shí),其隨距離增大而增大。
2.3.3 基線長(zhǎng)度對(duì)目標(biāo)的測(cè)量誤差影響。假設(shè)目標(biāo)在[OX]軸上的位置[xT]=50 000 m,目標(biāo)高度[h]=5 000 m。雙站測(cè)量誤差隨基線長(zhǎng)度的變化如圖5所示。
定位誤差都隨著基線長(zhǎng)度的增大而減小。
2.3.4 不同基線長(zhǎng)度下目標(biāo)相對(duì)基線位置變化對(duì)測(cè)量誤差的影響。分別取[O1O2]=7 000、10 000、15 000 m,目標(biāo)投影在水平面內(nèi)做圓周運(yùn)動(dòng),其中[r]=50 000 m,[h]=5 000 m,[θ]從0°到360°變化。仿真結(jié)果如圖6所示。
定位誤差變化隨著基線長(zhǎng)度的增加,整體都減小。
3 仿真與布站選擇
3.1 交會(huì)角
參與交會(huì)測(cè)量的測(cè)量站[O1]、[O2]與目標(biāo)[T]連線構(gòu)成的空間夾角[θ]稱為交會(huì)角。
3.2 交會(huì)精度
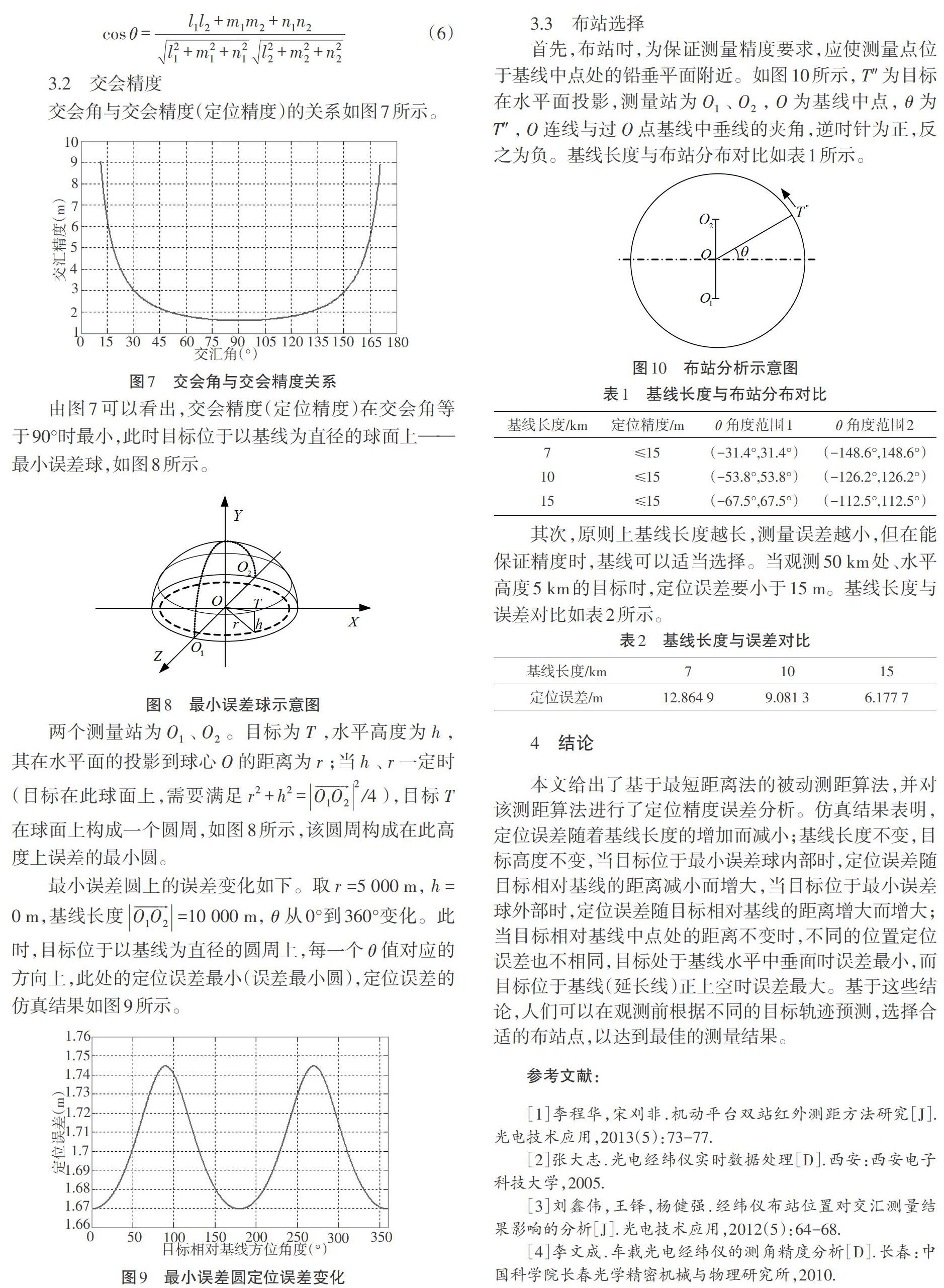
交會(huì)角與交會(huì)精度(定位精度)的關(guān)系如圖7所示。
由圖7可以看出,交會(huì)精度(定位精度)在交會(huì)角等于90°時(shí)最小,此時(shí)目標(biāo)位于以基線為直徑的球面上——最小誤差球,如圖8所示。
兩個(gè)測(cè)量站為[O1]、[O2]。目標(biāo)為[T],水平高度為[h],其在水平面的投影到球心[O]的距離為[r];當(dāng)[h]、[r]一定時(shí)(目標(biāo)在此球面上,需要滿足[r2+h2=O1O22/4]),目標(biāo)[T]在球面上構(gòu)成一個(gè)圓周,如圖8所示,該圓周構(gòu)成在此高度上誤差的最小圓。
最小誤差圓上的誤差變化如下。取[r]=5 000 m,[h]=0 m,基線長(zhǎng)度[O1O2]=10 000 m,[θ]從0°到360°變化。此時(shí),目標(biāo)位于以基線為直徑的圓周上,每一個(gè)[θ]值對(duì)應(yīng)的方向上,此處的定位誤差最小(誤差最小圓),定位誤差的仿真結(jié)果如圖9所示。
3.3 布站選擇
首先,布站時(shí),為保證測(cè)量精度要求,應(yīng)使測(cè)量點(diǎn)位于基線中點(diǎn)處的鉛垂平面附近。如圖10所示,[T″]為目標(biāo)在水平面投影,測(cè)量站為[O1]、[O2],[O]為基線中點(diǎn),[θ]為[T″],[O]連線與過(guò)[O]點(diǎn)基線中垂線的夾角,逆時(shí)針為正,反之為負(fù)。基線長(zhǎng)度與布站分布對(duì)比如表1所示。
其次,原則上基線長(zhǎng)度越長(zhǎng),測(cè)量誤差越小,但在能保證精度時(shí),基線可以適當(dāng)選擇。當(dāng)觀測(cè)50 km處、水平高度5 km的目標(biāo)時(shí),定位誤差要小于15 m。基線長(zhǎng)度與誤差對(duì)比如表2所示。
4 結(jié)論
本文給出了基于最短距離法的被動(dòng)測(cè)距算法,并對(duì)該測(cè)距算法進(jìn)行了定位精度誤差分析。仿真結(jié)果表明,定位誤差隨著基線長(zhǎng)度的增加而減小;基線長(zhǎng)度不變,目標(biāo)高度不變,當(dāng)目標(biāo)位于最小誤差球內(nèi)部時(shí),定位誤差隨目標(biāo)相對(duì)基線的距離減小而增大,當(dāng)目標(biāo)位于最小誤差球外部時(shí),定位誤差隨目標(biāo)相對(duì)基線的距離增大而增大;當(dāng)目標(biāo)相對(duì)基線中點(diǎn)處的距離不變時(shí),不同的位置定位誤差也不相同,目標(biāo)處于基線水平中垂面時(shí)誤差最小,而目標(biāo)位于基線(延長(zhǎng)線)正上空時(shí)誤差最大。基于這些結(jié)論,人們可以在觀測(cè)前根據(jù)不同的目標(biāo)軌跡預(yù)測(cè),選擇合適的布站點(diǎn),以達(dá)到最佳的測(cè)量結(jié)果。
參考文獻(xiàn):
[1]李程華,宋刈非.機(jī)動(dòng)平臺(tái)雙站紅外測(cè)距方法研究[J].光電技術(shù)應(yīng)用,2013(5):73-77.
[2]張大志.光電經(jīng)緯儀實(shí)時(shí)數(shù)據(jù)處理[D].西安:西安電子科技大學(xué),2005.
[3]劉鑫偉,王鐸,楊健強(qiáng).經(jīng)緯儀布站位置對(duì)交匯測(cè)量結(jié)果影響的分析[J].光電技術(shù)應(yīng)用,2012(5):64-68.
[4]李文成.車載光電經(jīng)緯儀的測(cè)角精度分析[D].長(zhǎng)春:中國(guó)科學(xué)院長(zhǎng)春光學(xué)精密機(jī)械與物理研究所,2010.
