骨科手術機器人在個體化椎間孔鏡穿刺導向中的應用
2020-08-26 07:22:48劉維克夏樂楊同崗李曉光孫連學
頸腰痛雜志 2020年4期
關鍵詞:手術
劉維克,夏樂,楊同崗,李曉光,孫連學
(山東省濱州市中醫醫院脊柱外科,山東濱州 256600)
在椎間孔鏡BEIS技術中,準確的穿刺可獲得更廣闊的鏡下操作空間[1],若穿刺不準會導致工作通道放置不到位,勉強上鏡后難以獲得足夠的操作空間,也容易引起相應的并發癥[2]。反復的穿刺會增加患者的痛苦,甚至損傷重要臟器;多次調整穿刺路徑的操作會增加手術輻射量,容易造成職業病,以及產生醫療風險事故。
“天璣”骨科機器人系統由國內自主研發,現已應用于脊柱及創傷等外科領域[3],尤其在椎弓根釘植入等脊柱疾病的操作方面已經趨于成熟,理論上機器人輔助定位能快速、準確地確定穿刺點和穿刺路徑,但在實際操作中,存在一定的問題:手術機器人在術中需要安裝“示蹤器”,常規腰椎手術示蹤器需要借助“棘突夾”固定在患者棘突上,而脊柱內鏡手術通常為局麻手術,患者很難耐受安裝“棘突夾”,并且與脊柱內鏡手術的“微創”理念不符。脊柱三維掃描定位需要拍攝256張不同角度照片,雖減少了醫護人員輻射量,對患者造成的輻射有增無減。為此,本院改進骨科手術機器人輔助穿刺的方式,采用示蹤器體表固定法,解決“示蹤器”安裝的問題,創新性地在機器人輔助定位中應用創傷二維正、側位定位法,使術中透視次數大大減少。為評測改進后骨科手術機器人在椎間孔鏡中應用的安全性和有效性,現用臨床隨機對照實驗進行驗證,報道如下。
1 資料與方法
1.1 一般資料
選取2018年4月~2019年6月入院接受椎間孔鏡手術的腰椎間盤突出癥患者60例,術前對患者影像資料進行分析,根據白一冰[1]BEIS技術理論,穿刺達到中央椎管區域為穿刺成功。
納入標準:①腰痛及單側下肢放射性腿痛;②影像學檢查示單節段椎間盤突出;③系統保守治療未見效。排除標準:①腰椎滑脫及腰椎不穩患者;②伴有嚴重腰椎管狹窄;③術后復發再次接受手術;④脊柱結核、腫瘤。將60例患者分為A組(傳統組)30例,其中男15例,女15例,年齡21~52歲,平均年齡38.5歲;B組(應用機器人組)30例,其中男17例,女13例,年齡19~53歲,平均年齡36.5歲。兩組患者年齡、性別無統計學差異(P>0.05)。
1.2 穿刺方法
兩組患者均使用示蹤器體表固定法,避免了棘突固定切口,均在局麻下開展手術。采用“天璣”骨科手術機器人手術系統自帶脊柱定位系統(即三維定位軟件)和創傷定位系統(即二維定位軟件),進行規劃定位。
A組行機器人輔助下傳統椎間孔鏡三維定位穿刺:患者采取俯臥位,按正規脊柱手術在施術部位行三維掃描,重建后輸入機器人主機,按照標準規劃路線后,啟動機械臂到穿刺點。B組應用骨科手術機器人輔助下二維定位穿刺:患者采取側臥位(也可以俯臥位),利用創傷組二維定位法,即只需正位、側位兩張照片,輸入主機規劃路線,啟動機械臂到穿刺點。見圖1。
因為傳統脊柱三維定位法已經為臨床熟悉,以下主要介紹應用機器人二維定位操作要點:①不采用脊柱三維掃描定位,采用創傷組二維正、側位定位法,減少了透視量,節省了手術時間。②數據采集成功后,在主機上規劃路線(即側位經過上關節突尖部到達下位椎體后上角,正位經過上關節突尖部到達椎間隙下位椎體上終板正中點)。③啟動機械臂運動到規劃進針點,裝接工作套筒,穿刺針經工作套筒穿刺至上關節突尖部,依次上導絲、環鉆,而后完成工作套筒的放置,接通脊柱內鏡系統,進行手術。對關節增生程度重的患者,沿導絲用環鉆行椎間孔成形后,工作套筒可放到預期的位置。

圖1 安裝示蹤器,機器人設計穿刺路線
1.3 觀察指標
分別記錄兩組穿刺成功次數、透視次數、穿刺時間、手術時間及術后3 d及1個月的VAS及JOA評分。
1.4 統計學方法
2 結果
兩組患者術后腰腿痛癥狀即刻緩解,術中患肢直腿抬高見神經根滑動良好,術后療效滿意,并且在術后隨訪中未出現樣本脫落。
兩組患者多數穿刺成功,但應用機器人二維組成功率稍高(29 vs 27),這與在定位過程中拍片少、身體發生位移的概率少有關。因位置變化、穿刺未成功的患者,在重新定位達到標準后或運用椎間孔二次成形后,順利完成手術,但手術時間延長。
透視次數方面比較,B組為2次,A組傳統組為256次;穿刺時間方面,B組(15±3.01)min,A組(29.32±8.32)min,差異有統計學意義(P<0.01).
術后3 d、1個月VAS評分與JOA評分方面,兩組間差異無統計學意義(P>0.05),見表1。
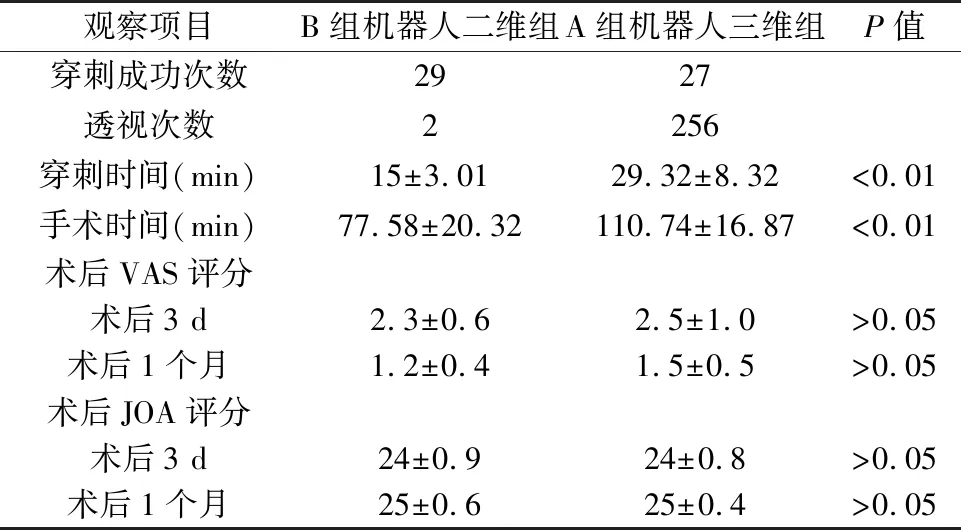
表1 兩組穿刺方法相關指標比較
3 討論
Emma認為[4]:骨科手術機器人對微創手術具有明顯優勢,可降低風險、減少并發癥。骨科手術機器人可自動執行或在術者指令下被動執行,機械手操作代替術者徒手操作,手術操作的穩定性和精準性得到提升[5-6],可以更加準確地引導內鏡手術的體表定位和穿刺角度,使內鏡手術初學者降低了脊柱內鏡手術的學習曲線[7],解決了術者反復穿刺才能達到滿意位置的弊端。
在減少輻射損傷方面,采用傳統“三維脊柱定位法”機器人輔助技術掃描,雖然有效減少了醫護人員的輻射量,對患者透視次數依然較多,甚至超過了常規內鏡手術C臂定位的透視量,雖然有各種防護措施,但依然難以徹底消除放射對人員的損害,而患者直接暴露在射線下,更容易造成損害[8]。而采用“二維創傷定位法”機器人輔助技術同樣可以達到相同的穿刺效果,透視次數只需要2次,較三維定位法明顯減少,提高了對醫護人員和患者的有效保護。同時,穿刺時間和透射次數減少,在一定程度上縮短了手術時間,減少了術區暴露,可降低感染風險[9]。所以,此項骨科手術機器人輔助技術在椎間孔鏡手術中的改良應用具有臨床價值,對復雜微創手術的普及和醫療資源的下沉也會有積極促進作用。
天璣骨科手術機器人輔助下椎間孔鏡穿刺定位雖然可以降低初學者的學習曲線,提高穿刺精度,從而提高手術安全性、縮短手術時間,但術前準備較繁瑣,包括機器人調試、擺放及機器人無菌區的建立和防護等;并且,在術中患者示蹤器的位置絕對不能發生位移,否則各種對應參數都會發生改變,導致定位角度和穿刺點發生偏差,這是機器人定位出現偏差的主要原因。如不能及時發現糾正,也會出現臨床風險,因此需要醫生在術中關鍵節點進行透視驗證。另外,隨著人工智能技術應用越來越廣,使以前復雜的手術簡單化,容易使年輕醫生穿刺過程中過分依賴機器人的引導,而不重視傳統手術徒手操作學習,難以掌握徒手獨立開展手術的能力。因此,如何處理人工智能輔助技術與傳統人工手術的關系問題,有待學者們深入思考。此外,鄧明攀等[10]認為,手術機器人具有提高手術精準性、安全性,創新診療模式,減少醫生工作量等社會價值,但應警惕手術機器人安全漏洞產生的醫療損害所引發的責任承擔難題。總而言之,如何用好人工智能輔助技術,揚長避短,是需要長遠考慮的問題。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48